

2.4.9 Метод точкових перетворень.
Розглянемо рiвняння динамiки нелiнiйної системи, якi задано у виглядi
 (2.118)
(2.118)
Користуючись методом дослiдження нелiнiйної системи на фазової площинi представимо фазову траєкторію руху зображаючої точки.

Рис. 2.63 До постановки задачі точкових перетворень
На фазової площинi
![]() вiзьмемо
який-небудь вiдрiзок лiнiї
вiзьмемо
який-небудь вiдрiзок лiнiї
![]() ,
який перетинають фазовi траєкторії у
одному напрямку. Позначимо деяку точку
,
який перетинають фазовi траєкторії у
одному напрямку. Позначимо деяку точку
![]() фазової траєкторії, яка належить також
i лiнiї
фазової траєкторії, яка належить також
i лiнiї
![]() .
Очевидно, що зображаюча точка, рухаючись
по фазової траєкторії, через деякий час
знову прийде до лiнiї
,
але у точки
.
Очевидно, що зображаюча точка, рухаючись
по фазової траєкторії, через деякий час
знову прийде до лiнiї
,
але у точки
![]() .
Тому що точки
та
одночасно належать лiнiї
та фазової траєкторії, то мiж ними повинен
бути функцiональний взаємозв'язок
.
Тому що точки
та
одночасно належать лiнiї
та фазової траєкторії, то мiж ними повинен
бути функцiональний взаємозв'язок
![]() ,
,
який дозволяє по
попередньому значенню
знайти наступне
.
Далi, поклавши
новому початковому значенню знайти
наступну точку
![]() i так далi.
i так далi.
Отже, функцiональний взаємозв'язок
![]() ,
(2.119)
,
(2.119)
називається функцiєю послідовності, яка визначає закон точкових перетворень для даної нелiнiйної системи.
Очевидно, що якщо
![]() ,
то процес є згасаючим, а нелiнiйна система
є стiйкою.
,
то процес є згасаючим, а нелiнiйна система
є стiйкою.
Функцiя послідовності
може бути представлена у площинi
![]() деякою кривою
деякою кривою
![]() ,
а бiсектриса
,
а бiсектриса
![]() прямого кута буде лiнiєю точкового
перетворення точки
прямого кута буде лiнiєю точкового
перетворення точки
![]() самої у себе (Рис.2.64).
самої у себе (Рис.2.64).

Рис. 2.64 Функція точкових перетворень при визначенні режиму автоколивань
Очевидно, що точок
перетину бiсектриси
з функцiєю послiдовностi
визначає умови
![]() .
.
Умова
передбачає, що фазова траєкторія,
виходячи iз точки
![]() через деякий час знову пiдiйде до цiєї ж
точки, тобто фазовi траєкторії замкнуться
i у нелiнiйної системi утворюється
граничний цикл (точка
через деякий час знову пiдiйде до цiєї ж
точки, тобто фазовi траєкторії замкнуться
i у нелiнiйної системi утворюється
граничний цикл (точка
![]() ).
).
Треба визначити умови стiйкостi граничного циклу.
Тому що кутовий коефiцiєнт бiсектриси дорiвнює 1, тобто
![]()
то умови
 (2.120)
(2.120)
визначають умови
стiйкостi граничного циклу. Дiйсно,
послiдовне перетворення зображаючої
точки
у
![]() показує що процес буде сходитися у точку
як справа, так i злiва.
показує що процес буде сходитися у точку
як справа, так i злiва.
Якщо
(2.121)
то це свiдчить про умови нестiйкостi граничного циклу.
Якщо сумiсного рiшення немає, а функцiя послідовності знаходиться нижче бiсектриси , то це вказує на стiйкiсть нелiнiйної системи.
Якщо функцiя Т розташована вище бiсектриси, то у нелiнiйної системи спостерiгаються розбіжні процеси, тобто система буде нестiйкою (Рис.2.65).

а) б)
Рис.2.65 Приклади нестійких а) автоколивань та б) стійких і нестійкиї процесів
Функцiя послідовності знаходиться на пiдставi рiшення рiвнянь динаміки
та на визначеннi лiнiї точкових перетворень.
Так, у випадку
релейних характеристик нелiнiйностi у
якостi лiнiї
на фазовій площинi може бути подана сама
лiнiя переключень, на якій одна iз координат
( тобто
![]() )
визначена через математичну модель
нелiнiйностi.
)
визначена через математичну модель
нелiнiйностi.
Очевидно, що при
цьому, якщо модуль швидкостi
![]() у точцi
буде меншою нiж у точцi
,
то процес є згасаючим.
у точцi
буде меншою нiж у точцi
,
то процес є згасаючим.
Функцiю послідовності
можна визначити, якщо виразити координати
зображаючої точки
![]() через
початковi координати
через
початковi координати
![]() .
.
Знаходячи
вiдповiднi рiшення на iнтервалах по
початковим умовам та постiйним iнтегрування
![]() ,
,
![]() ,
,![]() ,
можна визначити функцiональний зв'язок
,
можна визначити функцiональний зв'язок
![]() ,
який i буде функцiєю послідовності.
,
який i буде функцiєю послідовності.
Якщо у явної формi
визначити функцiю послідовності
неможливо, то її визначають у параметричному
виглядi. При цьому параметрична форма
точкового перетворення буде мати
параметр часу
![]() , за який зображаюча точка проходить по
фазової траєкторії вiд точки
до
.
, за який зображаюча точка проходить по
фазової траєкторії вiд точки
до
.
Через цей параметр на основi рiвнянь динаміки виражаються координати точок та
![]()
![]() (
2.122)
(
2.122)
та будуються графiки цих функцiй (Рис.2.66).

Рис. 2.66 До задачі визначення функції послідовності
Точка їх перетинання
дає умови
![]() ,
i, отже, координату
,
i, отже, координату
![]() замкненої
траєкторії, а також визначає перiод
вiдповiдних автоколивань.
замкненої
траєкторії, а також визначає перiод
вiдповiдних автоколивань.

Рис. 2.67 Параметричне визначення режиму автоколивань
Хай динаміка нелінійної системи описується рiвнянням
![]()
для даного випадку при
![]()
рiвняння фазової траєкторії визначаються як

Вiдкiля
![]()
Тому що у точцi
![]() значення
значення
![]() ,
то
,
то
![]()

Для iнтервалу, де
виконуються умови
![]() рiвняння динаміки приймає вигляд
рiвняння динаміки приймає вигляд
![]() а початкові умови визначаються як
а початкові умови визначаються як
![]() ,
,![]() .
.
Отже,

Тому що у точцi![]() ,
то
,
то


Рис. 2.68 До визначення функції точкових перетворень в нелінійної системі з непарно-симетричною нелінійностю
При пiдстановці
(3.65) у ( 3.64 ) здобудемо
![]()


Отже,

Використовуючи
t як параметр можна побудувати
залежнiсть
![]() .
.

Рис. 2.69 Параметричне розв’язання задачі
Із графiка (Рис.2.69) видно, що динаміка системи має згасаючий характер, тобто у системi не спостерiгаються автоколивання, а сама система є стiйкою.
Розглянемо нелiнiйну систему, яка має рiвняння руху у виглядi
![]()
а
![]() задано
у виглядi реле з петлею гістерезису
Рис.2.70
задано
у виглядi реле з петлею гістерезису
Рис.2.70

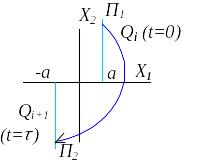
Рис. 2.70 Нелінійність з гістерезисом Рис. 2.71 До задачі визначення функції Т
Вiдомо, що
рiшення на фазової площинi
![]() буде мати вигляд (Рис.2.71) з лiнiями
переключення
буде мати вигляд (Рис.2.71) з лiнiями
переключення
![]() .
Будемо розглядати точкове перетворення
півпрямої
.
Будемо розглядати точкове перетворення
півпрямої
![]() у півпряму
у півпряму
![]() з початкової точки
у наступну
.
Тому що
при
з початкової точки
у наступну
.
Тому що
при
![]() визначається координатами
визначається координатами![]() ,
то закон перетворення будемо шукати у
параметричному виглядi
,
то закон перетворення будемо шукати у
параметричному виглядi
![]() та
та![]() .
.
Отже, на першому iнтервалi рух зображаючої точки буде здiйснюватися вiдповiдно рiвнянь
 ,
,
а значення координат на кiнцi iнтервалу, тобто у точцi , буде мати вигляд
 .
.

Рис. 2.72 Параметричний метод визначення параметрів автоколивань
Вiдкiля рiвняння параметричного закону точкових перетворень (Рис. 2.72) будуть
 ,
,

2.4.10 Другий (прямий) метод Ляпунова
Із теорії дослідження стійкості лінійних систем відомі теореми першого методу Ляпунова, які дозволяють визначити умови збіжності по лінеаризованим рівнянням, коли поведінка системи розглядається поблизу робочої точки при малих відхиленнях.
Згадаємо стисло постановку задачі дослідження стійкості по першому методу Ляпунова.
Хай задано зведені до нормальної форми Коші диференційні рівняння системи
 (2.123)
(2.123)
Будемо
вважати, що при визначеної сукупності
початкових умов
 є єдине рішення системи рівнянь
є єдине рішення системи рівнянь
 .
.
Хай
 позначає
деякий сталий процес, який приймемо за
незбуджений рух. Всякий другий рух
визначається збудженим, а відхилення
збудженого руху від незбудженого дає
можливість визначити нульове рішення
позначає
деякий сталий процес, який приймемо за
незбуджений рух. Всякий другий рух
визначається збудженим, а відхилення
збудженого руху від незбудженого дає
можливість визначити нульове рішення

при
якому незбуджений рух
 визначає асимптотичну стійкість.
визначає асимптотичну стійкість.
Геометричний
образ незбудженого руху
 системи
n-ого порядку можна представити
умовно у вигляді деякої інтегральної
кривої у n-мірному простору з додатковою
віссю часу
(
Рис. 2.73).
системи
n-ого порядку можна представити
умовно у вигляді деякої інтегральної
кривої у n-мірному простору з додатковою
віссю часу
(
Рис. 2.73).


Рис. 2.73 Рис.2.74
Збуджений
рух
буде
визначатися другою кривою, а різниця
між ними дає відхилення
 .
У відхиленнях
.
У відхиленнях
 ,
тобто у просторі координат стану системи
ця картина збудженого руху буде виглядати.
Рівняння
,
тобто у просторі координат стану системи
ця картина збудженого руху буде виглядати.
Рівняння
 називається станом рівноваги. Якщо для
лінійних систем мається один стан
рівноваги, а стійкість розглядається
як асимптотична, то для нелінійних
систем можуть з'являтися деякі області
стійких та нестійких станів рівноваги.
називається станом рівноваги. Якщо для
лінійних систем мається один стан
рівноваги, а стійкість розглядається
як асимптотична, то для нелінійних
систем можуть з'являтися деякі області
стійких та нестійких станів рівноваги.
При цьому .
В цьому випадку відхилення будуть прагнути не до нульових значень, а до деякої постійної величини
 (
2.124 )
(
2.124 )
Отже,
незбуджений рух системи називається
сталим, якщо задав "трубку" скільки
завгодно малого n-мірного перетину
,
можна добрати у початковий момент часу
 таку
область початкових умов , яка залежить
від
,
що із збільшенням часу
збуджений
рух
таку
область початкових умов , яка залежить
від
,
що із збільшенням часу
збуджений
рух
 через
деякий час не буде виходити із заданої
трубки
(Рис.2.75).
через
деякий час не буде виходити із заданої
трубки
(Рис.2.75).

Рис .2.75
Таким
чином, незбуджений рух системи називається
стійким, якщо при заданому
скільки б воно мале не було, існує таке
,
що при початкових умовах
 у подальшому руху
у подальшому руху
 виконуються умови
.
виконуються умови
.
Якщо
умови стійкості виконуються при
будь-якому характері нелінійної
залежностi
 всередині
визначеного класу нелiнiйностей, то
стiйкiсть вважається абсолютною.
всередині
визначеного класу нелiнiйностей, то
стiйкiсть вважається абсолютною.
Розглянемо тепер суть другого ( прямого ) метода Ляпунова.
Для
визначення стiйкостi нелiнiйних систем,
треба розглядати рух зображаючої точки
у n-мiрному просторi
 .
.
Хай
мається функцiя декiлькох змiнних

у
n-мiрному просторi. Отже, у кожної точки
даного простору функцiя
 визначена
та має одне значення.
визначена
та має одне значення.
Якщо функцiя у всiх точках деякої областi навколо координат зберiгає один i той же знак та нiде не перетворюється у нуль, крiм тiльки самого початку координат, то така функцiя називається знаковизначеною.
Функцiя називається знакопостійною, якщо вона зберiгає один i той же знак, але може перетворитися у нуль не тiльки у початку координат, але i у других точках розглянутої областi.
Якщо ж функцiя може мати рiзнi знаки у даної областi навколо початку координат, то вона називається знакозмінною.
Так
для тривимірного простору
 функцiя
функцiя
 при умовах
при умовах
 буде знакозмінною,
буде знакозмінною,
 при умовах
при умовах
 ,
буде знакопостійною. Тодi як при
,
буде знакопостійною. Тодi як при
 є знаковизначеною, тому що вона володіє
умовами
є знаковизначеною, тому що вона володіє
умовами
 тiльки
при
тiльки
при
 .
.
Другий метод Ляпунова, який вiдомий пiд назвою прямого метода, засновано на розгляданнi поведiнки спецiальної функцiї ( функцiї Ляпунова ) навколо початку координат у областi параметрiв стану.
Будь-яку
функцiю ,
яка тотожно перетворюється у нуль
,
при
,
яка тотожно перетворюється у нуль
,
при
 будемо
називати функцiєю Ляпунова, якщо у неї
у якостi величин
взяти
вiдхилення змiнних стану системи
управлiння у перехiдному процесi
будемо
називати функцiєю Ляпунова, якщо у неї
у якостi величин
взяти
вiдхилення змiнних стану системи
управлiння у перехiдному процесi

у
яких записуються рiвняння для цiєї
системи
 .
.
Щоб розглянути динаміку протiкання процесу у часi, треба визначити похiдну функцiї Ляпунова у часi

тобто

Отже, похiдна також є даною функцiєю координат стану системи
 (
2.125 )
(
2.125 )
Розглянемо
 ,
як вектор швидкостi зображаючої точки
у
фазовому просторi.
,
як вектор швидкостi зображаючої точки
у
фазовому просторi.
Тому
що
 а
а
 є проекцiєю на осi координат, та визначає
градiєнт функцiї
то
є проекцiєю на осi координат, та визначає
градiєнт функцiї
то
 (
3.126 )
(
3.126 )
Отож, похiдна функцiї Ляпунова у часi, яку складено у силу рiвнянь системи, представляє собою скалярний добуток градiєнту цiєї функцiї на вектор фазової швидкості.
Якщо функцiя
визначена
як деяка поверхня навколо почата
координат, то вектор
 перпендикулярний
до даної поверхнi
перпендикулярний
до даної поверхнi
 та спрямовує у бiк збiльшення значень
.
Очевидно, що якщо похiдна
та спрямовує у бiк збiльшення значень
.
Очевидно, що якщо похiдна
 ,
то фазовi траєкторії перетинають
поверхню
,
то фазовi траєкторії перетинають
поверхню
 у сторону збiльшення значень
.
у сторону збiльшення значень
.
Якщо ж
 (3.127)
(3.127)
то
фазові траєкторії йдуть у бік зменшення
.
Таким чином, якщо для системи
 iснує знаковизначена функцiя
,
похiдна вiд якої є знакопостійною
протилежного знаку, рiшення системи
iснує знаковизначена функцiя
,
похiдна вiд якої є знакопостійною
протилежного знаку, рiшення системи
 стiйке.
стiйке.
Розглянемо геометричну інтерпретацію даного формулювання.
У
фазовому просторi координат хi мається
функцiя
 ,
яка зображає замкнену поверхню та
охоплює точку рівноваги
,
яка зображає замкнену поверхню та
охоплює точку рівноваги
 .
Поверхня
.
Поверхня
 буде
знаходитися всерединi поверхнi
буде
знаходитися всерединi поверхнi
 ,
якщо
,
якщо
 .
При наближеннi всiх хi до
нулю,
.
При наближеннi всiх хi до
нулю,
 також наближаються до нулю, тобто
поверхня стягується у точку
також наближаються до нулю, тобто
поверхня стягується у точку
 .
Якщо похiдна вiд функцiї Ляпунова буде
знаковизначеною та вiд'ємною, тобто якщо
.
Якщо похiдна вiд функцiї Ляпунова буде
знаковизначеною та вiд'ємною, тобто якщо
 у всiх точках досліджуваного фазового
простору крiм одного тiльки початку
координат, де
у всiх точках досліджуваного фазового
простору крiм одного тiльки початку
координат, де
 , то при будь яких початкових умовах
зображаюча точка
, то при будь яких початкових умовах
зображаюча точка
 буде
асимптотично рухатися у бiк зменшення
.
Тому що
зменшується, то це позначає, що з протягом
часу фазовi траєкторії пронизують
замкненi поверхнi
,
переходячи iз зовнiшнiй поверхнi на
внутрiшнi, та, у кiнцевому пiдсумку,
стягуються до точки рiвноваги.
буде
асимптотично рухатися у бiк зменшення
.
Тому що
зменшується, то це позначає, що з протягом
часу фазовi траєкторії пронизують
замкненi поверхнi
,
переходячи iз зовнiшнiй поверхнi на
внутрiшнi, та, у кiнцевому пiдсумку,
стягуються до точки рiвноваги.

Рис. 2.76
Якщо ж функцiя
 буде
знакопостійною, то траєкторія зображаючої
точки
,
буде застрявати на деякої поверхнi
буде
знакопостійною, то траєкторія зображаючої
точки
,
буде застрявати на деякої поверхнi
 ,
тому що
,
тому що
 у цих областях перетворюється у нуль.
В цьому випадку рух вважається тiльки
стiйким. Таким чином, задачу по дослiдженню
стiйкостi нелiнiйної системи можна звести
до задачі визначення функції Ляпунова
та оцінки знаку її похiдної.
у цих областях перетворюється у нуль.
В цьому випадку рух вважається тiльки
стiйким. Таким чином, задачу по дослiдженню
стiйкостi нелiнiйної системи можна звести
до задачі визначення функції Ляпунова
та оцінки знаку її похiдної.
Задача про знаходження функцiї Ляпунова складна та зв'язана з великими математичними труднощами. Слiдує вiдмiтити, що якщо функцiю Ляпунова не можна знайти, то це ще не позначає, що система нестiйка.
Якщо
система описується рiвнянням вигляду
 ,
то для того щоб оцiнити стiйкiсть системи
треба щоб виконувалася умова
знакопостійності, а для цього функцiя
Ляпунова повинна виражатися у квадратичних
формах
,
то для того щоб оцiнити стiйкiсть системи
треба щоб виконувалася умова
знакопостійності, а для цього функцiя
Ляпунова повинна виражатися у квадратичних
формах
( 2.128 )
або у матричних формах
( 2.129 )
де

Тодi
 (2.130 )
(2.130 )
Якщо матриця Q додатно визначена, то
 (
2.131)
(
2.131)
коли
 ,
тобто виконується зменшення функцiї
,
а отже, траєкторії системи збiгаються
до початку координат. Отож,
якщо одночасно виконуються нерiвностi
та
,
тобто виконується зменшення функцiї
,
а отже, траєкторії системи збiгаються
до початку координат. Отож,
якщо одночасно виконуються нерiвностi
та
 у деякої областi простору змiнних
у деякої областi простору змiнних
 включаючи початок координат, то положення
рiвноваги у початку координат асимптотично
стiйке.
включаючи початок координат, то положення
рiвноваги у початку координат асимптотично
стiйке.
Хай лінійна система керування описується системою рівнянь


або

Хай дана система


Для
того, щоб визначити умови, якi накладаються
на функцiї
 при яких нульове рiшення системи буде
стiйке, функцiя Ляпунова повинна бути
знакопостійною.
при яких нульове рiшення системи буде
стiйке, функцiя Ляпунова повинна бути
знакопостійною.
Отже,
 .
.
Таким чином на розглядуваній кривій функцiя V(х1х2) перетворюється у функцiю аргументу часу t, що дозволяє визначити похiдну.

Функцiя V представляє собою квадрат вiдстанi вiд iнтегральної кривої до початку координат. Тому нульове рiшення цiєї системи буде явно стiйким, якщо ця вiддаль монотонно зменшується при . Для цього потрiбно, щоб виконувались умови
 при
при
 .
.
Отже,
якщо
 ,
то перетворивши вираз
,
то перетворивши вираз

де
 .
.
Одержимо
умови стiйкостi системи
 .
.
Хай система автоматичного управлiння описується рiвнянням

Функцiю
Ляпунова виберемо у вигляд

Тодi

Для
стiйкостi системи, тобто для виконання
умов
 треба, щоб виконувалась
треба, щоб виконувалась
 .
.
Квадратична форма або матриця є додатно визначеною, вiд'ємно визначеною, знакододатною, знаковiд'ємною, невизначеною або тотожно рiвною нулю тiльки i тiльки у тому випадку, якщо властивi значення матрицi , якi для симетричної матрицi дiйснi, вiдповiдно всi додатнi, всi вiд'ємнi, всi невiд'ємнi, всi не додатнi, мають рiвнi знаки або всi дорiвнюють нулю.
Очевидно, що на пiдставi виразу
 ( 2.122 )
( 2.122 )
можна визначити через криволiнiйний iнтеграл
 (
2.123 )
(
2.123 )
функцiю
Ляпунова
 Вiдомо,
що скалярна функцiя
визначається iз криволiнiйного інтегралу
вiд вектора
Вiдомо,
що скалярна функцiя
визначається iз криволiнiйного інтегралу
вiд вектора
 у тому випадку, якщо
не залежить вiд шляху iнтегрування. Для
цього ж необхiдно i достатньо, щоб
виконувалися умови
у тому випадку, якщо
не залежить вiд шляху iнтегрування. Для
цього ж необхiдно i достатньо, щоб
виконувалися умови
 (
2.124 )
(
2.124 )
де
 – i-та складова градiєнту
– i-та складова градiєнту

В цьому випадку
 ( 2.125 )
( 2.125 )
Хай
система описується диференцiйним
рiвнянням
 або рiвнянням у змiнних стану
або рiвнянням у змiнних стану

Визначимо градiєнт функцiї Ляпунова у виглядi

та будемо шукати похiдну вiд функцiї Ляпунова у виглядi

Якщо
прийняти
 ,
здобудемо
,
здобудемо

Якщо
 ,
то
,
то
 i
для виконання умови
i
для виконання умови
 повинно виконуватись
повинно виконуватись
 .
.
При цьому

Функцiя Ляпунова може бути визначена по криволiнiйному інтегралу

_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
P.S.

для незалежностi вiд шляху iнтегрування повинна виконуватись умова

_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Відомо,
що канонічною формою рівняння


 зветься такий їх вигляд, коли матриця
зветься такий їх вигляд, коли матриця
 приведена до жорданового вигляду.
Зробимо заміну
приведена до жорданового вигляду.
Зробимо заміну

 .
Тоді
.
Тоді
 ,
,
 ,
де
,
де
 .
.
Зробимо
заміну
 .
При цьому
.
При цьому

 буде визначати канонічну форму
рівняння руху.
буде визначати канонічну форму
рівняння руху.
Для
того, щоб стану рівноваги
 системи відповідав єдиний стан
рівноваги
системи відповідав єдиний стан
рівноваги
 необхідно, щоб визначник системи не
дорівнював нулю, тобто щоб виконувалася
умова
необхідно, щоб визначник системи не
дорівнював нулю, тобто щоб виконувалася
умова
 або
або
 . Якщо врахувати, що
. Якщо врахувати, що
 ,
,
 ,
,
 ,
будемо мати
,
будемо мати
 .
.