

2.4.8 Перехідні процеси у нелінійних системах.
Метод припасовування.
Із розгляду процесу побудови фазових траєкторій у випадку кусково-лінійних характеристик нелiнiйностi слiдує, що наступне рiшення знаходиться за початковими умовами, якi зображуюча точка набуває на кiнцевому етапi попереднього рiшення. Таким чином, вирiшуючи лiнiйне диференцiйне рiвняння у загальному виглядi окремо для кожної дiлянки процесу, на якому вони справедливi, та слідкуючи за правильною стиковкою рiшень одне за другим, можна побудувати загальний рух нелiнiйної системи.
Цей метод побудови перехiдного процесу отримав назву методу припасовування.
Хай нелiнiйнiсть представляє собою релейний пiдсилювач з петлею гістерезису (Рис.2.58), а лiнiйна система описується рiвнянням


Рис. 2.58 Нелінійна система з гістерезисом
Отже, загальне
рiвняння замкненої системи має вигляд

Будемо розглядати
рух системи з моменту
 ,
коли початковi умови приймають значення
,
коли початковi умови приймають значення
 , а
, а
 ( Рис.2.59).
( Рис.2.59).

Рис. 2.59 Задача визначення метода припасовування
На першому iнтервалi
рiшення маємо
 або
або
 .
.
Постiйнi iнтегрування визначаються iз початкових умов

Отже,
 .
.
Побудова першої дiлянки перехiдного процесу виконується до виходу зображуючої точки на лiнiю переключення, тобто у точку В. Рішення на кiнцi цiєї дiлянки дають

а
 визначається з умов
визначається з умов
 .
.
На другому iнтервалi рiшення знаходиться по рiвнянням

Очевидно, що
постiйнi iнтегрування
 знаходяться по кiнцевим значенням
та
знаходяться по кiнцевим значенням
та
 на кiнцi першого iнтервалу. При цьому для
дiлянки ВС початковий момент часу
прирiвнюється до нуля
на кiнцi першого iнтервалу. При цьому для
дiлянки ВС початковий момент часу
прирiвнюється до нуля
 ,
а постiйнi iнтегрування визначаються за
новими початковими умовами
,
а постiйнi iнтегрування визначаються за
новими початковими умовами

По цим даним виконується побудова перехiдного процесу на другому iнтервалi до виходу системи у нову точку C переключення, де знову визначається

для моменту
 ,
якi знову приймаються як початковi для
третього iнтервалу, на якому рiшення
вiдшукується по рiвнянню
,
якi знову приймаються як початковi для
третього iнтервалу, на якому рiшення
вiдшукується по рiвнянню

i так далi.
Якщо виявляється,
що
 то у системi виникнуть автоколивання з
півперіодом
то у системi виникнуть автоколивання з
півперіодом
 .
Тодi
.
Тодi
 .
Звiдки
.
Звiдки
 та
та

що дає змогу визначити

та розрахувати перiод автоколивань, i, отже, їх частоту

З умов
 визначається амплiтуда
визначається амплiтуда
 автоколивань. При цьому
автоколивань. При цьому

дає можливiсть визначити

а потiм

Для системи, яка
зображена на (Рис.2.58) для початкових
умов ,
,
 ,
рiшення приймає вигляд
,
рiшення приймає вигляд

Якщо позначити
то

При
 виконується перехiд до другого iнтервалу,
де
виконується перехiд до другого iнтервалу,
де

а рiшення приймає вигляд

яка дає при
 i рiшення здобувається по рiвнянню
третього iнтервалу
i рiшення здобувається по рiвнянню
третього iнтервалу

для якого .
.
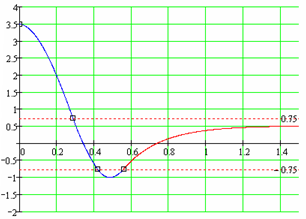
Рис.2.60 Перехідний процес на основі методу припасовування
Далi рiшення
переходить до рiвнянь другого iнтервалу,
але з початковими умовами, якi визначаються
через кiнцевi значення на третьому
iнтервалi i так далi поки координати
системи
не зайдуть у зону нечутливостi з нульовою
швидкiстю
 (Рис.2.60).
(Рис.2.60).
П 2.19
За
умовами задачі П 2.18 побудувати
перехідний процес методом припасовування
рішень при

По початковим умовам будується перша ділянка

![]()
![]()
![]()

![]()
![]()
Визначається час
на кінці першої ділянки ( або час початку
другої ділянки )
![]()
![]()
![]()
![]()


Будується друга ділянка

![]()


Визначається час
на кінця другої ділянки ( або час початку
третьої ділянки )
![]()
![]()

3. Будується третя
ділянка
![]()
![]()

![]()

![]()

![]()


Крива перехiдного процесу може бути побудована приблизно по вiдомій фазовій траєкторії системи.
Розглянемо одну
iз дiлянок фазової траєкторії у межах
![]() (Рис.2.61).
(Рис.2.61).

Рис .2.61 Геометрична задача побудови перехідного процесу в нелінійної системі
Визначимо час, за
який координата
![]() проходить вiдрiзок
проходить вiдрiзок
![]() .
Тому що на початковому етапi швидкість
змiни координати дорiвнює
.
Тому що на початковому етапi швидкість
змiни координати дорiвнює
![]() а на кiнцi -
а на кiнцi -![]() ,
то середня швидкiсть
,
то середня швидкiсть
![]() буде
буде
![]() .
.
Очевидно, що середня швидкiсть буде визначена з бiльшою точнiстю, якщо вiдрiзок фазової траєкторії краще апроксимується прямою лiнiєю.
Тодi
![]()
Із додаткових побудувань (Рис.3.61) видно, що
![]()
Тодi
![]()
Вiдкiля
![]()
або
![]() (2.117)
(2.117)
Із побудови видно,
що похибки розрахунку будуть тим менше,
чим менший кут
![]() .
На практицi, побудова виконується
подвiйним значенням кута, тобто
.
На практицi, побудова виконується
подвiйним значенням кута, тобто
![]() .
.
Якщо при побудовi
перехiдного процесу на фазовій траєкторії
не розмiщується цiле значення кутових
вiдрiзкiв, то треба змiнити значення кута
![]() , а отже i iнтервал часу
, а отже i iнтервал часу
![]() .
.


Рис.2.62 Побудова перехідного процесу на основі графічного методу
На Рис.2.62 наведено процедуру розбиття фазової траєкторії на кутовi відрізки та наведено вiдповiдний перехiдний процес для нелінійної системи.
Із розгляду точного рiшення та приблизного можна встановити, що результати добре збiгаються.