

Тема 2.1 Аналіз неперервних систем керування за допомогою диференційних рівнянь.
При побудові теоретичних моделей доцiльно виходити iз основних фiзичних законiв у їх найбiльш "чистому", фундаментальному виглядi, тобто iз законiв збереження маси, кількості руху, енергiї тощо.
Загальна постановка:
Змiна у часi деякої субстанцiї у елементарному об'ємi дорiвнює сумi притока-витока цiєї субстанцiї через поверхню елементарного об'єму.
У якості субстанцiї виступають: маса, кiлькiсть руху, кiлькiсть теплоти, тощо.
Тодi  (2.1)
(2.1)
де  -
фазова змiнна,
-
фазова змiнна,
 -
потiк фазової змiнної,
-
потiк фазової змiнної,
 -
швидкiсть генерацiї субстанцiї.
-
швидкiсть генерацiї субстанцiї.
Потiк фазової
змiнної є вектор

 (2.2)
(2.2)
Таким чином при такому пiдходi до складення моделей математичний опис буде складатися iз диференцiйних рiвнянь у частинних похiдних, а кожний елемент системи доводиться розглядати як деяку систему.
Для практичного використання така модель системи виявляється не доцiльно складною та важкорозв'язуємою.
2.1.1 Диференційні рівняння та методи їх розв’язання.
Фiзичнi
величини
,
якi збуджують систему викликають
вiдповiднi реакцiї
![]() на
її виходах, при цьому зв'язок мiж впливами
та реакцiями відображається оператором
A системи:
на
її виходах, при цьому зв'язок мiж впливами
та реакцiями відображається оператором
A системи:
![]()
Тому що змiна стану процесу здiйснюється у часi, то iстотно звернутися до методу опису, який засновано на використання похiдних сигналiв, тобто на диференцiйних рiвняннях, якi зв'язують вхiднi та вихiднi координати системи.
При опису системи на цьому рiвнi потрiбно дотримуватися деяких загальносистемних правил.
1. Описуєма технiчна система повинна бути декомпонована на пiдсистеми, якi у свою чергу повиннi бути фiзично однорiдними: механiчними, електричними, тепловими, тощо.
2. Стан кожної пiдсистеми описується потоками та потенцiалами.
3. Структура кожної пiдсистеми складається iз численностi елементiв та зв'язкiв.
4. Простий елемент характеризується однiєю фазовою змiнною типу потоку та однiєю фазовою змiнною типу потенціалу.
5. Шукована величина повинна входити у рiвняння iз коефіцієнтом рiвним одиницi.
6. Число рiвнянь повинно дорiвнювати числу елементiв (підсистем) у системi.
7. Коефiцiєнти при похiдних сигналiв повиннi мати розмiр часу.
Для вiрного підходу до складання диференцiйних рiвнянь до основних системних понять додаються також динамiчнi поняття.
1. Змiнна кiлькостi – це змiнна стану, яка виражає кiлькiсть деякої субстанцiї, яку утримує елемент.
2. Змiнна розходу – це швидкiсть зміни змiнної кiлькостi за одиницю часу.
3. Різниця потенцiалу – це змiнна стану, яка добута шляхом вимiрювань на обох кiнцях елементу.
Запам'ятайте!
1. Сума всiх змiнних розходу для деякого з'єднання дорiвнює нулю.

Рис. 2.1 Типові з’єднання сигналів
2. Сума всiєї різницi потенцiалiв для деякого замкнутого контуру системи дорiвнює нулю.

3. Опiр елементу процесу визначається як швидкiсть змiни рiзницi потенцiалiв при змiнi змiнних розходу.

4. Ємність елементу визначається як швидкiсть змiни змiнної кількості при змiнi рiзницi потенцiалiв.
 Наприклад:
Наприклад:
1. Електричнi елементи характеризуються струмами та напругами у окремих елементах (резисторах, конденсаторах, котушках індуктивності, джерелах струмiв та напруги, тощо).
Компонентнi рiвняння:

Топологiчнi рiвняння:

(перший закон Кiргофа, (другий закон Кiргофа,
рiвняння рiвноваги.) рiвняння сумісності)
2. Механiчнi обертальнi
системи xарактеризуються кутовою
швидкiстю
 кiнцiв дiлянки, обертальним моментом
кiнцiв дiлянки, обертальним моментом
 ,
моментом iнерцiї
,
моментом iнерцiї
 ,
обертальною гнучкiстю
,
обертальною гнучкiстю
 , обертальним опором
, обертальним опором
 .
.
Компонентнi рiвняння:


Топологiчнi рiвняння:

П 2.1
Визначити диференційне рівняння для ланки

Складається узагальнене рівняння
 ,
де
,
де
 .
.Підстановка дає
 ,
де
,
де
 .
.Складається диференційне рівняння
 ,
де
,
де
 .
.
Отже,
 .
.
П 2.2
Скласти математичну модель для системи керування швидкістю обертання валу двигуна постійного струменю ДПС

1. Розглянемо рівняння підсилювача потужності, навантаженого на якірний ланцюг ДПС з незалежним збудженням
 ,
,
яке зводиться до вигляду
 .
.
Позначивши
 , отримуємо
, отримуємо
 .
.
Розглянемо рівняння ДПС.
З урахуванням 2-го закону Кіргофа запишемо рівняння відносно моментів.
 ,
,
де
 --момент
двигуна пропорційний струменю якоря
--момент
двигуна пропорційний струменю якоря
 ,
,
 -- момент тертя ,
пропорційний швидкості
-- момент тертя ,
пропорційний швидкості

 --
момент навантаження.
--
момент навантаження.
Отже,

або


3.
Математична модель системи

може бути записана відносно будь яких сигналів

П 2.3
Скласти математичну модель системи керування швидкістю обертання валу навантаження

Система складається з давача задаючого впливу П1, попереднього підсилювача К1, підсилювача потужності КY, двигуна постійного струменю ДПС, редуктора Р .
Визначимо рівняння для кожного елемента системи
У якості давача задаючого впливу обрано потенціометр, який запитується постійною напругою =U. На виході повзунка потенціометра знімається напруга Ug, яка характеризує задаючий вплив g(t).
Попередній підсилювач з коефіцієнтом підсилювання К1 навантажено на вхід підсилювача потужності , вхідний опір якого значно більше ніж вихідний опір попереднього підсилювача. Отже, рівняння, яке зв’язує вихід попереднього підсилювача з його входом є лінійним алгебраїчним рівнянням
3. Розглянемо рівняння підсилювача потужності, який має коефіцієнт підсилювання К2. Підсилювач потужності з внутрішнім опіром Rі навантажено на якірний ланцюг з опіром RЯ та індуктивністю LЯ двигуна постійного струменю з незалежним збудженням . Відповідно П2.2 рівняння підсилювача, навантаженого на якорний ланцюг ДПС має вигляд
4. Рівняння двигуна
ДПС має вигляд

5. Рівняння
редуктора

Таким чином загальна математична модель складається із системи рівнянь

При цьому структурна схема системи керування набуває вигляду

Класифікація системи керування:
Принцип дії -- розімкнута , закон керування -- по задаючому впливу
По мат. опису оператора системи -- лінійна, неперервна, стаціонарна
По цілі керування -- система стабілізації,
По кількості каналів керування -- одномірна.
П 2.4
Визначити математичну модель для П 2.2, якщо в системі застосовується інтегральний закон керування.
Включимо
на виході попереднього підсилювача
додатковий ДПС малої потужності ,
вал якого через редуктор з’єднано
з повзунком додаткового потенціометра.
На вхід підсилювача подається


Тому
що кут обертання вихідного валу
редуктора пропорційний інтегралу від
швидкості обертання валу ДПС, тобто
 або
або
 ,
та зневажаючи малою інерційністю
ДПС, будемо мати
,
та зневажаючи малою інерційністю
ДПС, будемо мати
 і, відповідно,
і, відповідно,
 .
.
Враховуючі,
що
 пропорційно зміщенню повзунка
потенціометра
пропорційно зміщенню повзунка
потенціометра
 ,
то
,
то
 ,
що визначає наявність інтегруючого
пристрою у прямому каналі передачі
системи керування.
,
що визначає наявність інтегруючого
пристрою у прямому каналі передачі
системи керування.
П 2.5
Скласти диференційні рівняння для ланок
A B C

Якщо залежнiсть
вихiдних змiнних деякої пiдсистеми
(об'єкта, елемента) можна зобразити у
явному виглядi
 (2.3)
або у виглядi системи алгебраїчних
рiвнянь, у яких всi похiднi дорiвнюють
нулю
(2.3)
або у виглядi системи алгебраїчних
рiвнянь, у яких всi похiднi дорiвнюють
нулю
 (2.4)
, то
отримаємо статичну модель пiдсистеми
(об'єкта, елемента).
(2.4)
, то
отримаємо статичну модель пiдсистеми
(об'єкта, елемента).
Якщо вхiднi змiннi
задавати як функцiї часу
![]() ,
а у рiвняння ввести похiднi по часу, то
система
,
а у рiвняння ввести похiднi по часу, то
система
 буде описуватися системою диференцiйних
рiвнянь, а модель буде зватися динамiчною.
буде описуватися системою диференцiйних
рiвнянь, а модель буде зватися динамiчною.
При неперервності значень змінних модель зветься неперервною, коли ж змiннi можуть приймати значення тiльки iз кiнцевої чисельностi, то система рiвнянь стає дискретною, а математична модель також буде дискретна.
Математична
модель технiчної системи, яка знайдена
як безпосереднє об'єднання моделей
елементiв у загальну систему рiвнянь,
зветься повною математичною моделлю.
На основi розв'язання системи рiвнянь
можна встановити функцiональний зв'язок
пари сигналів
![]() :
:
 ,
(2.5) , де
,
(2.5) , де

– порядок правої частини рiвняння;
– порядок лiвої частини рiвняння.
Рiвняння (2.5) може бути записано у неявної формi запису динаміки.
 (2.6)
(2.6)
або вiдносно старшої похiдної невiдомої вектор-функцiї
 (2.7)
(2.7)
За допомогою
введення нових змiнних (змiнних стану)
рiвняння (2.6) може бути перетворене у
систему рiвнянь у нормальнiй формi Кошi
 .
.
Для аналiзу сталих станiв при постiйних вхiдних впливах, тобто для аналiзу статики необхiдно всi похiднi дiючих у системi сигналiв прирiвняти до нуля.
При цьому рiвняння
(2.5) будуть алгебраїчними , а зв'язок пари
 є статичною характеристикою
є статичною характеристикою
 (2.5a).
(2.5a).
Рiшення рiвняння
(2.5) дозволяє визначити у евклiдовому
просторi деяку криву
 ,
яка зветься iнтегральною кривою.
,
яка зветься iнтегральною кривою.
а)
 б)
б)

Рис.2.2 Представлення розв’язку диференційного рівняння у вигляді а) інтегральної кривої, б) фазової траєкторії
Це ж рiшення,
виражене через змiннi стану
 ,
виражене у фазовому просторі визначає
закон руху по деякій траєкторії
,
виражене у фазовому просторі визначає
закон руху по деякій траєкторії ,
яка зветься фазовою траєкторією.
,
яка зветься фазовою траєкторією.
Якщо всi рiшення
статики, тобто алгебраїчнi рiвняння у
робочій точці будуть лiнiйними, то
спiввiдношення (2.5a) може бути зведене
до лiнiйних форм
 (2.5b). Якщо коефiцiєнти
(2.5b). Якщо коефiцiєнти
 та
та
 є сталими i не змiнюються у процесi
керування, то при визначенi реакцiї
початком вiдлiку доцiльно приймати
моменти прикладання впливу
є сталими i не змiнюються у процесi
керування, то при визначенi реакцiї
початком вiдлiку доцiльно приймати
моменти прикладання впливу
 ,
де
,
де
 .
.
При цьому початковi
умови ,
де
,
де
 ,
можуть вiдрiзнятися вiд нуля.
,
можуть вiдрiзнятися вiд нуля.
Розглянемо САУ, яка описується лiнiйним диференцiйним рiвнянням (2.5b),та заданi початковi умови
 (2.8)
(2.8)
Приклад:
1. Система описується рівнянням

Умова 1 Визначити
вільний рух, якщо


Однорідне рівняння
має вигляд
 тобто
тобто
 ,
корені якого
,
корені якого ;
;
 .
Розвязок шукається у вигляді
.
Розвязок шукається у вигляді
 при початкових умовах
при початкових умовах
 .
.
Враховуючи початкові умови, отримуємо




Рис. 2.3 Представлення розв’язку диференційного рівняння за умовою
Можна використати
і формул
 ;
;
Якщо корені
характеристичного рівняння будуть
комплексні
 ,
то рішення шукається у вигляді
,
то рішення шукається у вигляді
 , де
, де
 .
.
Умова 2. Знайти
закон зміни
 при
при
 та нульових початкових умовах
та нульових початкових умовах
 .
.
Представимо рівняння у загальному вигляді

 .
.
Тому що права
частина рівняння утримує похідну від
задаючого впливу, слід перерахувати
початкові умови, які мають місце
безпосередньо після прикладення впливу




. . .
 (2.9)
(2.9)
Тому що
 ,
то
,
то

 .
.
Саме рішення
зводиться до рішення однорідного
рівняння з новою змінною
 ,
де
,
де – вимушене рішення.
– вимушене рішення.
Отже,
 при
початкових умовах
при
початкових умовах

Таким чином


Що дає

–

Рис.2.4 Представлення розв’язку диференційного рівняння за умовою 2
Хай для умови 1
 .
.
Відповідь: 
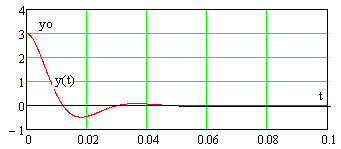
Рис. 2.5 Представлення розв’язку диференційного рівняння за умовою 3.1
Для умови 2


Рис. 2.6 Представлення розв’язку диференційного рівняння за умовою 3.2
Умова 4 Хай САУ
описується рівнянням


Система разузгоджена
на величину
 .
.
Характеристичне
рівняння






при





Рис.2.7 Представлення розв’язку диференційного рівняння за умовою 4
Можна також використати формули:
Якщо всі корені
дійсні

 ,
,
 ,
,

Якщо є комплексні:




П 2.7
Приклад розв’язання диференційних рівнянь
1. Розв’язання однорідного диференційного рівняння з початковими умовами

Загальний роз’вязок має вигляд Вимушений рух дорівнює нулю
Характеристичне рівняння Розрахунок коренів



Отже,
 З урахуванням початкових умов
З урахуванням початкових умов

Таким
чином


2. Розв’язання неоднорідного диференційного рівняння з початковими умовами.

Загальний
розв’язок має вигляд
Вимушений рух



Характеристичне рівняння Розрахунок коренів
Отже,
 З урахуванням початкових
умов
З урахуванням початкових
умов

Таким
чином


3. Розв’язання неоднорідного диференційного рівняння з початковими умовами та з похідними від вхідного впливу.

Перерахунок початкових умов


Рішення
зводиться до однорідного рівняння
з новою змінною
 .
.
Вимушнше
рішення має вигляд
 .
Розв’язок шукається у вигляді
.
Розв’язок шукається у вигляді
 , що потребує
додаткового перерахування початкових
умов для нової змінної
, що потребує
додаткового перерахування початкових
умов для нової змінної



Таким
чином

