

8.9.6. Вычисление среднеквадратической ошибки
следящей системы
Найдем
среднеквадратическую ошибку следящей
системы автосопровождения цели
радиолокационной станцией. На вход
системы поступает задающее воздействие
![]() (азимут цели) совместно с помехой
f(t).
Сигнал ошибки равен разности входного
полезного сигнала x(t)
и сигнала на выходе
(азимут цели) совместно с помехой
f(t).
Сигнал ошибки равен разности входного
полезного сигнала x(t)
и сигнала на выходе
![]() (азимут антенны) следящей системы РЛС:
(азимут антенны) следящей системы РЛС:
![]() .
.
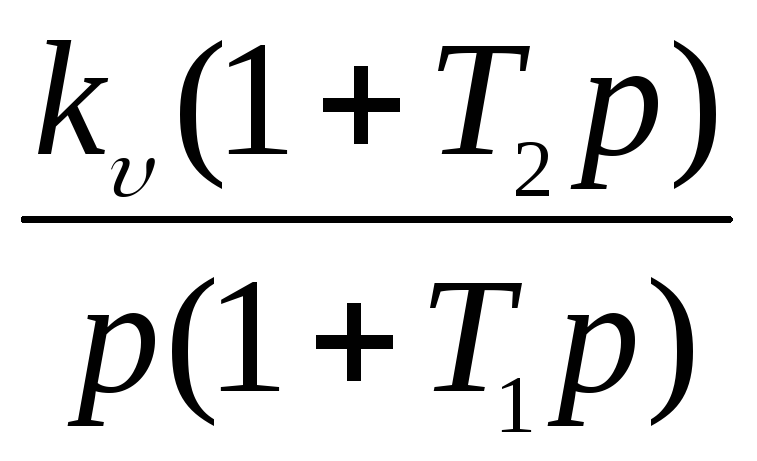
Задающее воздействие и помеха — стационарные случайные не коррелированные сигналы. Такой сигнал поступает на усилительное устройство системы. Передаточная функция разомкнутой системы
![]() .
.
Спектральная плотность ошибки
![]() .
.
Задающим
воздействием системы будем считать
![]() .
Спектральная плотность его найдена в
формуле
(8.50). В
качестве помехи примем случайный процесс
типа белого шума:
.
Спектральная плотность его найдена в
формуле
(8.50). В
качестве помехи примем случайный процесс
типа белого шума:
![]() .
.
Подставив в выражение спектральной плотности ошибки ее составляющие, получим:
 ,
,
где
![]() ,
,
т. e. среднее значение квадрата ошибки можно представить в виде суммы составляющих:
![]() .
.
Пользуясь
выражением для табличного интеграла,
значение квадрата СКО
![]() найдем в виде
найдем в виде
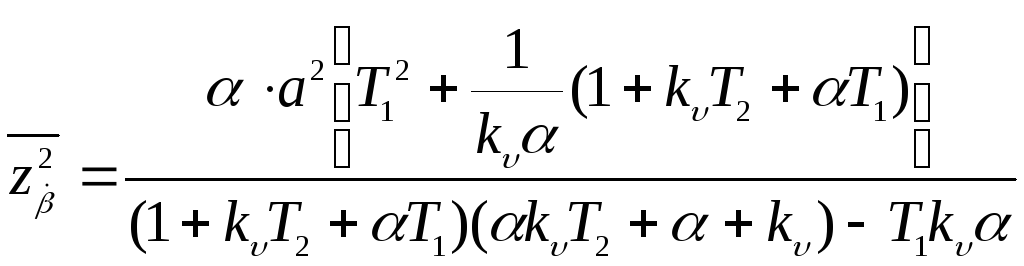 .
.
Аналогично можно определить квадрат СКО:
 .
.
Если
известны параметры системы и помехи
![]() ,
,
![]() ,
то среднеквадратическая ошибка:
,
то среднеквадратическая ошибка:
![]()
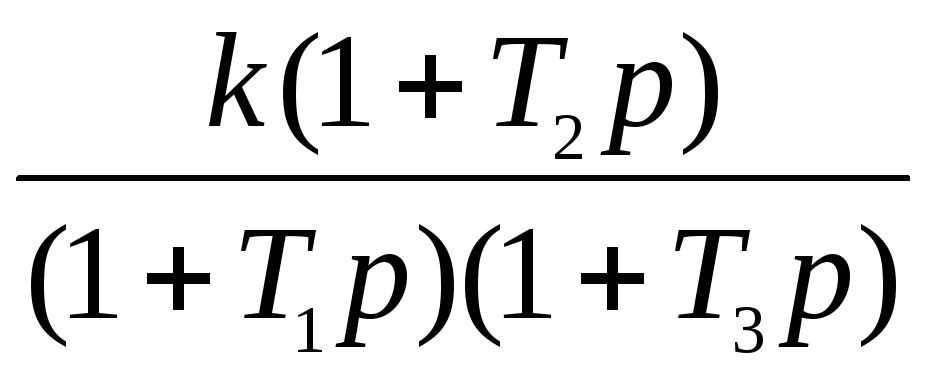
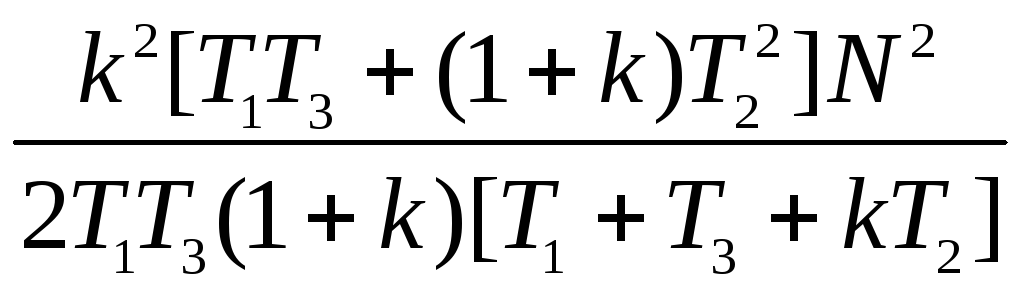
Выражения для дисперсии флуктуационной ошибки, определенной через параметры передаточной функции разомкнутой системы К(р), при постоянной величине спектральной плотности помехи на входе, системы, приведены в табл. 8.2.
Таблица 8.2
-
Передаточные функции К(р)
Дисперсия

B заключение отметим, что приведенные соотношения для статистического анализа в частотной области удобны в установившемся режиме. Анализ во временной области более сложен, но целесообразен для моментов времени, близких к моменту приложения воздействия.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Основной
-
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования – СПб.: Профессия, 2004. – 752 с.
-
Воронов А.А. Основы теории автоматического управления. Автоматическое регулирование непрерывных систем. –М.: Энергия, 1980. –312 с.
-
Техническая кибернетика. Теория автоматического регулирования / Под ред. В.В. Солодовникова. Кн.1,2,3. – М.: Машиностроение, 1967-1969.
Дополнительный
-
Макаров И.М., Менский Б.М. Линейные автоматические системы. Элементы теории, методы расчета и справочный материал. – М.: Машиностроение, 1982. – 504 с.
-
Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Наука, 1989. – 301 с.
-
Сборник задач по теории автоматического регулирования и управления / Под ред. В.А. Бесекерского. – М.: Наука, 1978. – 512 с.
-
Справочник по теории автоматического управления / Под ред. А.А. Красовского. – М.: Наука, 1987. – 712 с.
-
Теория автоматического управления / Под ред. А.С.Шаталова. – М.: Высшая школа, 1977. – 448 с.
-
Лившиц Н.А., Пугачев В.Н. Вероятностный анализ систем автоматического управления. – М.: Сов. Радио, 1963. – 896 с.
Рассмотрено на заседании
кафедры ПУ
Протокол № от 2009 г.
Зав. кафедрой ПУ __________________ В. Я. Распопов