

5.7. Интегральные оценки качества
Интегральные оценки относятся к аналитическим косвенным методам исследования качества САУ.
В основе метода лежат интегральные показатели, характеризующие отклонение переходного процесса реальной системы от идеализированного переходного процесса. В качестве идеального принято считать ступенчатый (скачкообразный) переходный процесс, протекающий мгновенно и без пере- регулирований, или процесс, представляемый экспонентой с заданными параметрами.
Интегральные оценки имеют вид определенных интегралов с пределами
0 ∞ от некоторых функций отклонения регулируемой величины. Наибольшее применение находят линейные и квадратичные оценки.
Простейшей линейной интегральной оценкой может служить величина
![]() ,
(5.51)
,
(5.51)
где
![]() – отклонение
регулируемой величины x(t)
от
установившегося значения
xуст.
– отклонение
регулируемой величины x(t)
от
установившегося значения
xуст.
В
устойчивой системе
![]() → 0
при t
→ ∞
и этот
интеграл имеет конечную величину.
Геометрически
это площадь
под кривой переходного процесса,
построенного для отклонения (рис.5.9).
Площадь будет тем меньше, чем быстрее
затухает переходный процесс и чем меньше
величина отклонения. Поэтому параметры
системы рекомендуется выбирать таким
образом, чтобы добиваться минимума этой
интегральной оценки.
→ 0
при t
→ ∞
и этот
интеграл имеет конечную величину.
Геометрически
это площадь
под кривой переходного процесса,
построенного для отклонения (рис.5.9).
Площадь будет тем меньше, чем быстрее
затухает переходный процесс и чем меньше
величина отклонения. Поэтому параметры
системы рекомендуется выбирать таким
образом, чтобы добиваться минимума этой
интегральной оценки.
Д![]() ля
вычисления интеграла
(5.51) нет
необходимости находить
ля
вычисления интеграла
(5.51) нет
необходимости находить
![]() ,
так как его можно легко вычислить,
используя изображение Лапласа.
Действительно, изображение Лапласа
определяется выражением
,
так как его можно легко вычислить,
используя изображение Лапласа.
Действительно, изображение Лапласа
определяется выражением
![]() .
.
О![]() тсюда
следует, что интеграл
(5.51) может
быть найден посредством предельного
перехода (р
→
0):
тсюда
следует, что интеграл
(5.51) может
быть найден посредством предельного
перехода (р
→
0):
![]() .
.
Неудобством
интегральной оценки вида
(5.51) является
то, что она годится только для монотонных
процессов, когда не меняется знак
отклонения
![]() .
Если же имеет место колебательный
процесс (рис
.5.9),
то при вычислении интеграла (5.51) площади
будут складываться алгебраически и
минимум этого интеграла может
соответствовать колебаниям с малым
затуханием или вообще без затухания.
Так как форма переходного процесса при
расчете систем регулирования может
быть неизвестна, то применять интегральную
оценку вида
(5.51) оказывается
практически нецелесообразным. Поэтому
предлагается другая интегральная
оценка:
.
Если же имеет место колебательный
процесс (рис
.5.9),
то при вычислении интеграла (5.51) площади
будут складываться алгебраически и
минимум этого интеграла может
соответствовать колебаниям с малым
затуханием или вообще без затухания.
Так как форма переходного процесса при
расчете систем регулирования может
быть неизвестна, то применять интегральную
оценку вида
(5.51) оказывается
практически нецелесообразным. Поэтому
предлагается другая интегральная
оценка:
![]() (5.52)
(5.52)
т.е. сумма абсолютных величии всех площадей под кривой переходного процесса. Оказалось, что вычисление ее по коэффициентам уравнения затруднительно. В связи с этим целесообразно перейти к квадратичной интегральной оценке вида
![]() ,
(x→0
при
t→∞)
(5.53)
,
(x→0
при
t→∞)
(5.53)
которая не зависит от знаков отклонений, а значит, и от формы переходного процесса (монотонной или колебательной).
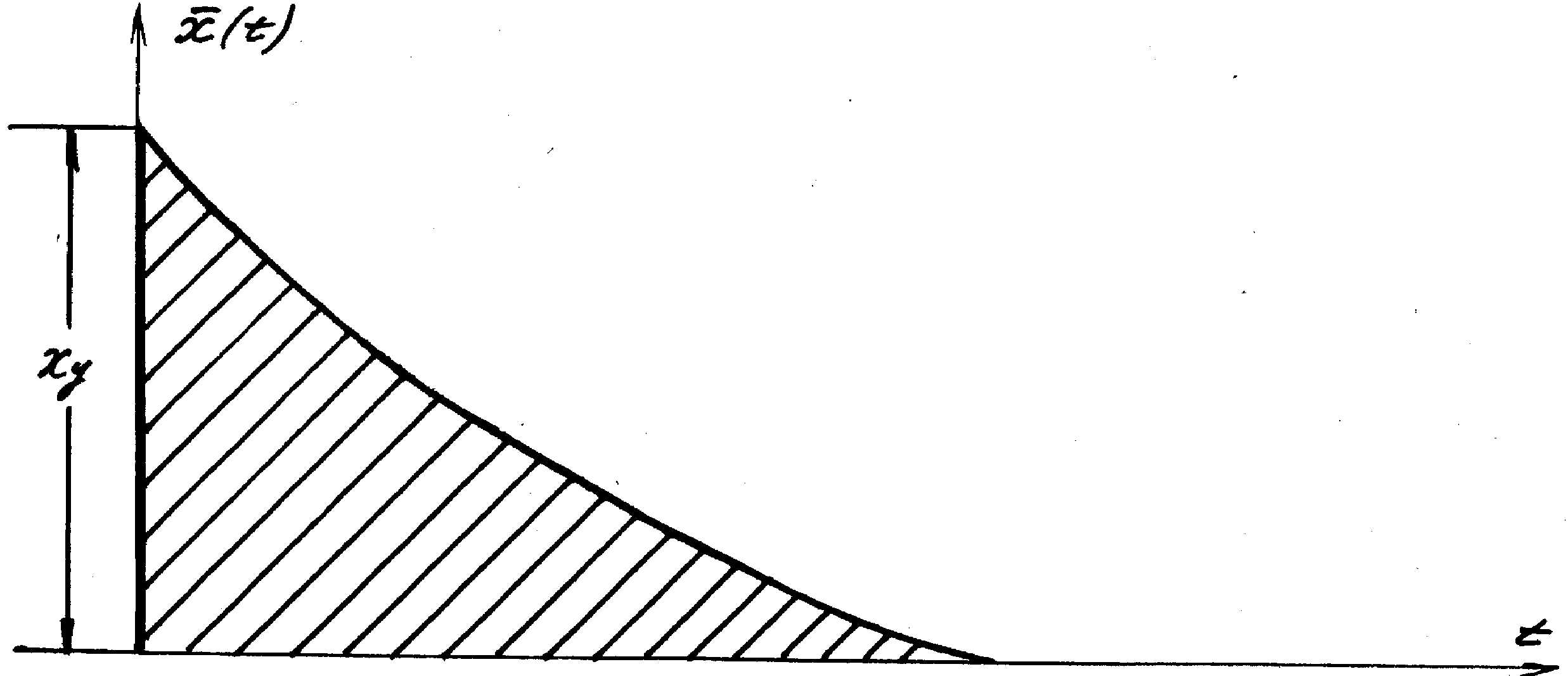

Рис. 5.9
Величина I1 будет тем меньше, чем меньше сумма заштрихованных на рис. 5.9 площадей (взятых для квадратов ординат), т.е. чем лучше переходный процесс приближается к идеальному скачку регулируемой величины вслед за скачком управляющего или возмущающего воздействия.
Кроме
простейшей квадратичной интегральной
оценки иногда применяют более сложные,
которые позволяют учесть не только
характер изменения
![]() ,
но и его
производных:
,
но и его
производных:
![]()
![]() (5.54)
(5.54)
Оценки (5.54) являются более полными оценками качества, однако их применение связано с громоздкими преобразованиями и вычислениями. Поэтому на практике обычно ограничивается применением простейшей квадратичной интегральной оценки. Любая интегральная оценка зависит от коэффициентов передаточной функции (коэффициентов характеристического уравнения).
Вычисление линейной оценки вида I0 можно выполнить следующим образом.
Пусть имеется дифференциальное уравнение
![]() (5.55)
(5.55)
с
произвольными начальными условиями
![]() .
.
Интегрируя уравнение (5.55), имеем:
![]() .
(5.56)
.
(5.56)
В устойчивой САУ в установившемся режиме, т.е. при t→ ∞ , производные всех порядков равны нулю, следовательно, из (5.66) можем записать:
![]() . (5.57)
. (5.57)
Из (5.57) видно, что линейная интегральная оценка I0 определяется коэффициентами дифференциального уравнения системы и начальными условиями.
При
проектировании системы по минимуму
интеграла I1
система
может оказаться обладающей слишком
большой колебательностью. В силу этого
вводится дополнительная оценка
![]() .
Считается допустимым для систем
второго порядка
= 0,80,9,
для систем третьего порядка
= 0,70,8,
для систем четвертого порядка
= 0,60,7
.
.
Считается допустимым для систем
второго порядка
= 0,80,9,
для систем третьего порядка
= 0,70,8,
для систем четвертого порядка
= 0,60,7
.
Определение косвенных показателей качества по интегралу вида I2 дает удовлетворительные результаты для систем, склонных к повышенной колебательности.
Интегральные оценки можно использовать при выборе оптимального значения какого-либо параметра системы, обеспечивающего минимум такой оценки.