

1.3. Примеры систем автоматического управления
Пример 1. Система «Самолет – автопилот» (рис. 1.2). Здесь корпус самолета 1 является регулируемым объектом, гироскоп 2 с потенциометрической схемой служит измерительным устройством. Далее идут усилитель 3, двигатель 4 с редуктором 5 (рулевая машинка) и в качестве регулирующего органа - руль 6.
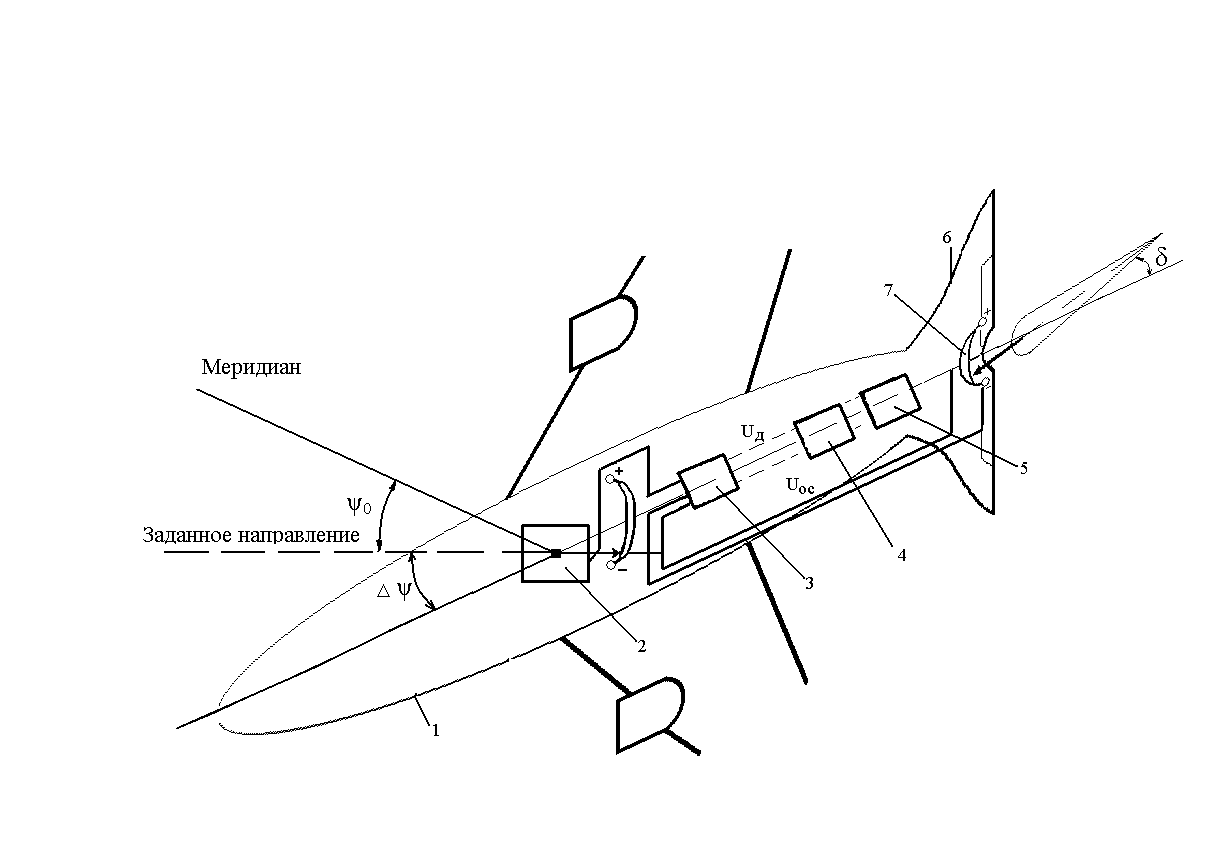
Рис. 1.2
Гироскоп сохраняет неизменное направление в пространстве. Поэтому при отклонении самолёта на угол ∆ψ от заданного курса ψ0 движок, связанный с гироскопом, смещается с нулевой точки. В результате на усилитель подаётся напряжение, пропорциональное углу отклонения ∆ψ. Оно приводит в движение исполнительное устройство, состоящее из усилителя 3, рулевой колонки 4 и редуктора 5. При этом вследствие отклонения руля на угол δ самолёт возвратится в требуемое положение.
Очевидно, что если с помощью автопилота надо поддерживать неизменный курс ψ0 или изменять по заданной программе, то данная система управления будет работать либо в режиме стабилизации постоянной величины, либо в режиме программного регулирования. Если же самолет надо наводить на какую-либо цель, визируемую дополнительным устройством (оптическим или радиолокационным) то данная система управления будет работать как следящая система.
На рис.1.3 изображена функциональная схема рассмотренной системы, которая наглядно показывает взаимодействие элементов и позволяет оценить систему по различным признакам. Для улучшения устойчивости и качества стабилизации в систему вводятся различные корректирующие устройства и местные обратные связи 7.
Uг
U
Uy
ЧЭ
(2)
УЭ
(3)
ИЭ
(4,5)
РО
(6)
РО
(1)
Ψ0
δ
Ψ































Uoc
ЧЭ(7)
.
 1.4.
1.4.

Рис. 1.3
Пример 2. Система автоматического управления напряжением генератора постоянного тока. Принципиальная схема изображена на рис. 1.4.

Рис.1.4
Система работает следующим образом. Напряжение обратной связи Uoc, пропорциональное регулируемой величине – напряжению генератора Uг , сопоставляется с напряжением сравнения. Разность Uср - Uос поступает на вход электронного усилителя У, питающего обмотку управления ОУ электромашинного усилителя (ЭМУ), являющегося возбудителем генератора Г. Для повышения динамической устойчивости системы в ней предусмотрена стабилизирующая местная обратная связь по напряжению ЭМУ, осуществляемая при помощи конденсатора С и резистора Rс. Величина главной обратной связи устанавливается делителем Rо.
При разделении системы автоматического управления на функциональные элементы (рис.1.5) генератор будем рассматривать как регулируемый объект РО. На него действует напряжение возбуждения Uвг , являющееся регулирующим воздействием, и возмущающее воздействие – ток нагрузки IH.
Регулируемая величина Uг преобразуется в напряжение Uос элементом главной обратной связи ГОС и сравнивается с напряжением Uср при помощи элемента сравнения ЭС, который в данном случае является электрическим соединением.
Стабилизирующий контур СRс представим как элемент местной обратной связи (MОC), входной величиной которого является напряжение усилителя Uу, а входной – напряжение Uо, вычитаемое из основного сигнала Uср - Uос.
UВг
Uг




Uoc
IH
чэ
ГОС
МОС
Ucp
Ucp-Uoc
Uy
У
ИЭ
РО
U0
UГ













Рис. 1.5
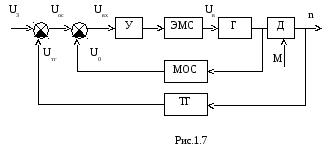
Пример 3. Система автоматического регулирования скорости двигателя постоянного тока. Из рассмотрения принципиальной схемы системы управления (рис. 1.6.) видно, что скорость вращения двигателя преобразуется с помощью тахогенератора ТГ в напряжение обратной связи Uос , сравниваемое с задающим напряжением Uз , изменяя которое можно задавать различную скорость двигателя. Разность Uз–Uос суммируется с напряжением Uо МОС, получаемым для повышения динамических свойств системы в стабилизирующем контуре RоСо , и подается на вход усилителя постоянного тока. При отсутствии сигнала на входе усилителя токи Iу1 и Iу2 равны между собой и результирующая МДС управления ЭМУ равна 0. Электромашинный усилитель нагружен на ОВ генератора, работающего на двигатель постоянного тока с независимым возбуждением по схеме генератор – двигатель.
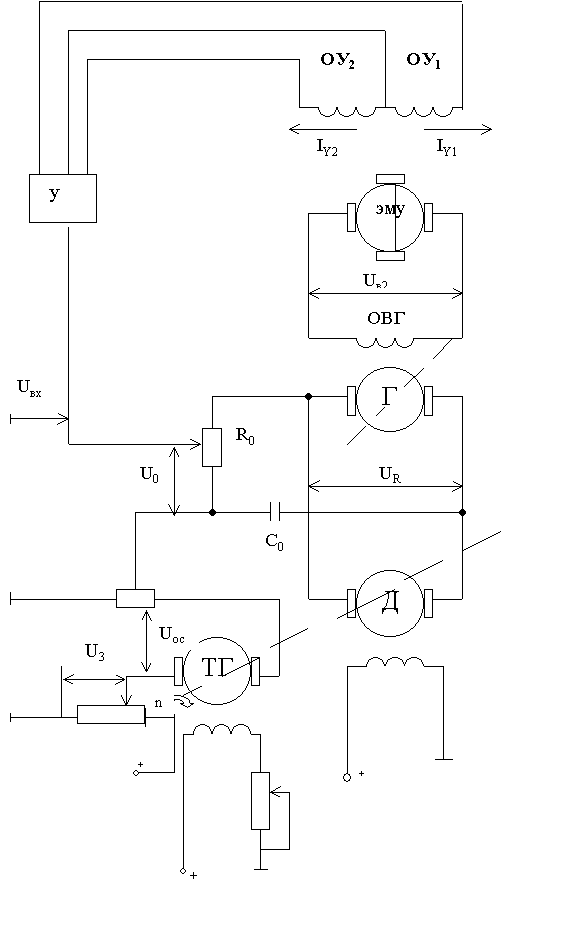
Рис.1.6
Функциональная схема САУ скорости двигателя постоянного тока представлена на рис. 1.7.
В соответствии со схемой рассмотренная система представляет собой двухконтурную, одноконтурную, астатическую систему стабилизации непрерывного действия.
Пример 4. Следящая система с асинхронным двухфазным двигателем. Принципиальная схема системы изображена на рис 1.8.
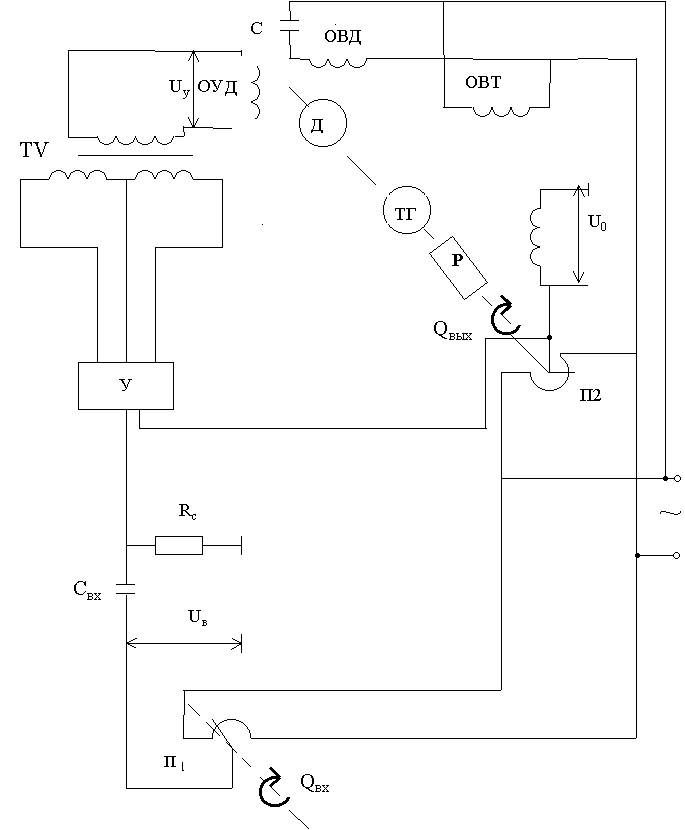
Рис. 1.8
Ф
Uв
Uв
Qвых
УЭ ИЭ
Qвх Р













U0
Qвых
ТГ



Рис. 1.9