

4.7. Выделение областей устойчивости
Рассмотренные выше критерии устойчивости позволяют решать в основном задачи анализа, связанные с определением устойчивости систем при всех известных параметрах. Их можно использовать и для выбора неизвестных параметров из условия устойчивости САУ. Необходимо выбирать такое значение неизвестных параметров, при котором система будет устойчивой. Однако такой подход к решению поставленной задачи связан с громоздкими вычислениями. Эта задача проще решается путем выделения в пространстве коэффициентов характеристического уравнения областей, соответствующих устойчивому состоянию системы.
Метод разбиения пространства (плоскости) коэффициентов характеристического уравнения Д(р)=0 на области устойчивости и неустойчивости называется методом Д–разбиения.
Положим, что все коэффициенты характеристического полинома
![]()
известны, кроме двух аi и aj. Требуется определить диапазон изменения этих коэффициентов, соответствующий устойчивому состоянию системы.
Для этого в плоскости неизвестных коэффициентов ai, aj можно выделить n областей, каждая из которых соответствует определенному количеству корней характеристического уравнения с отрицательными действительными частями Д(n-r) (рис. 4.14а).
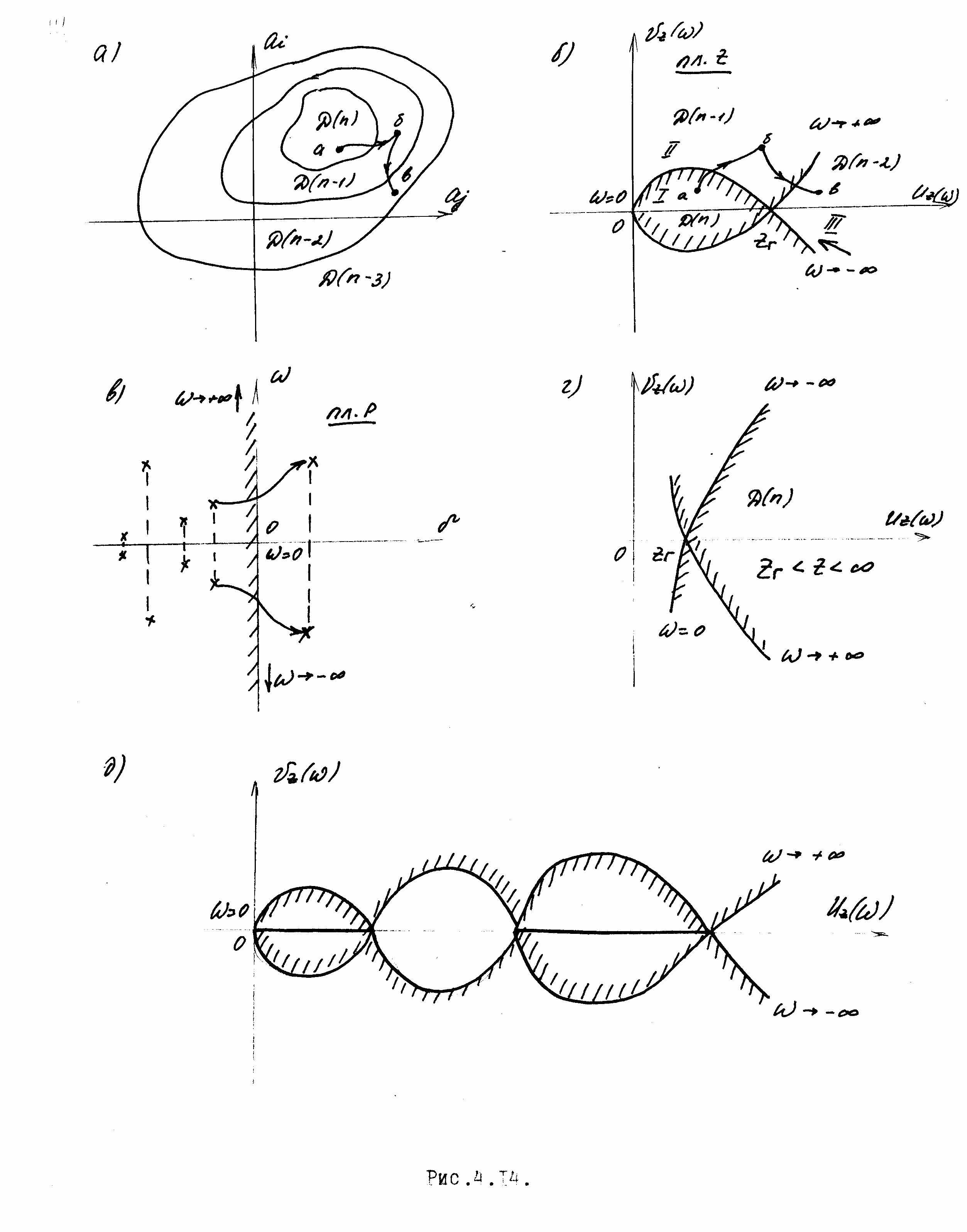
Рис. 4.14
Среди этих областей можно найти область Д(n), соответствующую n левым корням, т.е. устойчивому состоянию системы.
Переход из области Д(n) в область Д(n - 1) связан с переходом одного левого корня через граничную кривую, разделяющую эти области. На плоскости комплексного переменного р (рис.4.15в) это соответствует переходу одного из корней из левой полуплоскости в правую через мнимую ось.
Таким образом, граничную кривую в плоскости коэффициентов ai и aj можно представить себе как отображение мнимой оси плоскости р и, следовательно, записать ее уравнение в виде
Д(i)=0. (4.31)
Уравнение (4.31) позволяет построить граничную кривую в плоскости коэффициентов характеристического уравнения.
4.7.1. Д–разбиение плоскости одного комплексного параметра
Положим, что неизвестный параметр Z системы входит в характеристическое уравнение линейно. Тогда характеристическое уравнение можно представить в виде
![]() ,
(4.32)
,
(4.32)
где S(p) и N(p) многочлены, зависящие от комплексной переменной p.
На основании (4.31) и (4.32) можно записать уравнение граничной кривой
S(i)+ZT(i)=0 . (4.33)
Решая (4.33) относительно Z и выделяя в полученном выражении действительную Uz() и мнимую Vz() части, получим
![]() .
(4.34)
.
(4.34)
На основании (4.34) можно построить граничную кривую в плоскости Z при изменении частоты =-+.
Учитывая четность функции Uz(), можно ограничиться построением лишь одной ее половины при изменении частоты =0, а затем дополнить ее симметричной половиной (рис.4.14б).
Граничная кривая разделила плоскость Z на три области I, II, III. Среди них необходимо определить область, соответствующую устойчивому состоянию системы. Для определения этой области применяет правило штриховки, которое сводится к следующему. Мнимая ось в плоскости p и ее отображение в плоскости Uz,Vz – граничная кривая, штрихуются слева по отношению к направлению движения в сторону увеличения частоты от - до +. Можно предположить, что область 1, имеющая внутреннюю штриховку, соответствует левой полуплоскости p, т.е. является областью Д(n). Чтобы проверить это предположение, достаточно любое значение параметра Z, соответствующее области 1, подставить в исходное характеристическое уравнение и проверить устойчивость системы по одному из критериев. Если система окажется устойчивой для одного значения параметра Z, то она будет устойчивой и для всех остальных значений Z, лежащих внутри области Д(n).
Если с физической точки зрения параметр Z является действительным, т.е. его мнимая часть равна нулю Vz(), то область устойчивости Д(n) вырождается в отрезок прямой, совпадающей с действительной осью (рис.4.14б).
Полученный отрезок показывает, что система будет устойчива при изменении Z в диапазоне 0<Z<Zг, где Zг – некоторое граничное значение параметра, при котором система оказывается на границе устойчивости. При Z>Zг система становится неустойчивой.
Выбор конкретного значения параметра в диапазоне 0Zг производят с учетом того, как влияет этот параметр на качество и ошибки регулирования. Например, при определении общего коэффициента передачи системы выбирают его наибольшее значение, соответствующее устойчивой области, но не равное граничному значению. При этом необходимо обеспечить некоторый запас устойчивости, исключающий потерю устойчивости при изменении параметров САУ в реальных условиях.
Кроме случая, отраженного на рис 4.14б, граничные кривые в плоскости одного параметра часто принимают вид, показанный из рис. 4.14г,д.
ЛЕКЦИЯ 12
План лекции: