

-
Методы коррекции динамических свойств сау.
ПОСЛЕДОВАТЕЛЬНЫЕ И ПАРАЛЛЕЛЬНЫЕ КОРРЕКТИРУЮЩИЕ
УСТРОЙСТВА
Для улучшения динамических свойств САУ могут применяться последовательные, параллельные и смешанные схемы включения корректирующих устройств (КУ) (рис. 6.1).
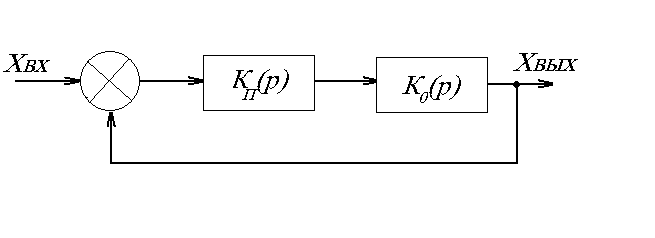
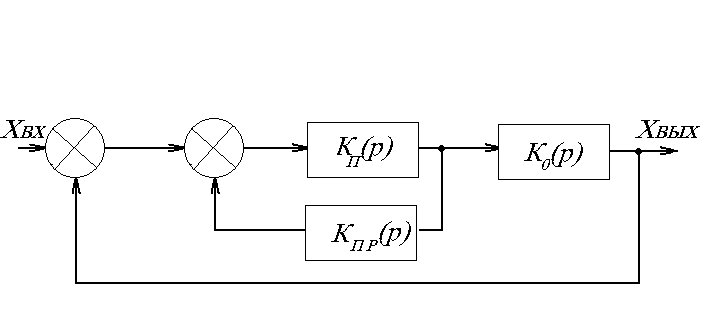
Рис. 6.1
Выбор схемы включения корректирующих устройств решается, исходя из преимуществ и недостатков, свойственных каждому из приведенных вариантов.
Последовательное включение КУ, при введении производных в основную цепь регулирования, увеличивает скорость управляющего воздействия, но одновременно усиливается вредное воздействие высокочастотных возмущений. Кроме того, повышение скорости воздействия требует повышения мощности системы и ее прочности.
Введение интегралов в закон регулирования делает систему астатической и устраняет статическую ошибку. Вместе с тем, для обеспечения устойчивости астатических систем приходится значительно усложнять схему САУ.
Обратные связи имеют преимущества по сравнению с последовательными. Они менее чувствительны к внешним воздействиям и изменениям параметров основной цепи регулирования и не усиливают помех.
Основным преимуществом обратных связей является то, что они уменьшают влияние нестабильности параметров и характеристик шунтируемых элементов на динамические характеристики системы. В связи с этим в таких системах могут применяться более простые и дешевые элементы.
Недостатки параллельной коррекции:
а) более сложная схема включения и сами, параллельные КУ, как правило, сложнее последовательных;
б) возникает необходимость применения согласующих элементов;
в) возможны перегрузки цепи, охваченной корректирующим контуром.
Последовательные корректирующие элементы выгодно отличаются от параллельных простотой и возможностью расширения полосы пропускания частот при включении дифференцирующего элемента в цепь регулирования.
Однако они обладают следующими недостатками:
а) ослабляют основной сигнал в цепи управления, что требует дополнительного усиления;
б) увеличивают чувствительность системы к помехам (при расширении полосы пропускания);
в) качество работы САУ существенно зависит от стабильности характеристик и параметров системы;
г) в интегрирующих элементах приходится применять конденсаторы большой емкости;
д) требуются большие входные сигналы постоянного тока;
е) необходимость согласования входов и выходов КУ с блоками системы.
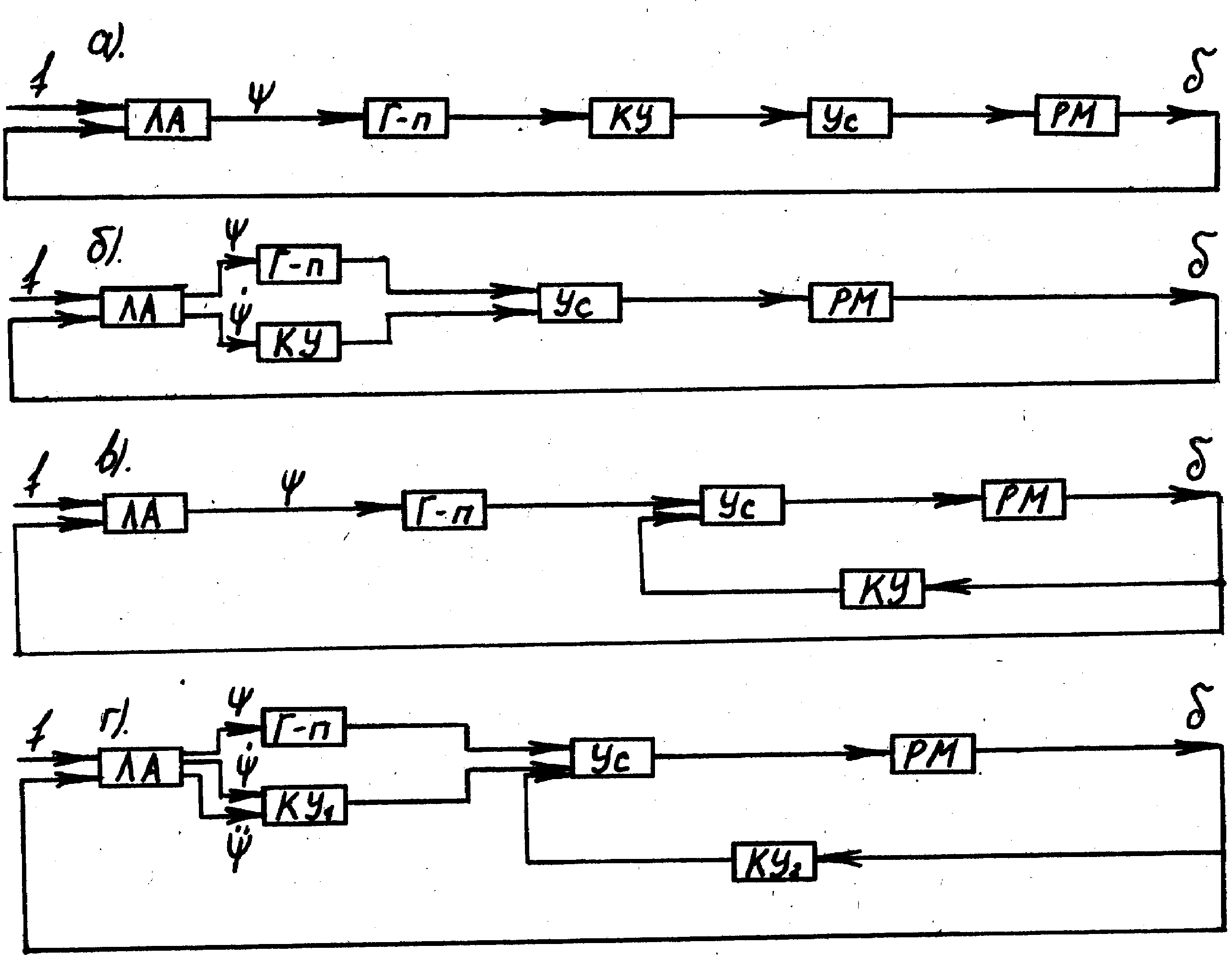
Рис. 6.2
Несмотря на сказанные недостатки, последовательные КУ нашли широкое применение в силу своей простоты. В качестве последовательных КУ чаще всего применяют пассивные электрические или активные четырехполюсники. На рис. 6.2 показаны возможные схемы включения корректирующих устройств в системе стабилизации летательного аппарата (ЛА) по одной из угловых координат, например, по тангажу. При этом в качестве последовательных корректирующих устройств могут применяться не только электрические цепочки (схема А), но и более сложные элементы, например, гироскопические датчики угловых скоростей (схема Б), гиротахоакселерометры (схема В) и др. В качестве местных обратных связей чаще всего применяются потенциометры, выполняющие функции жесткой обратной связи или тахогенераторы, обеспечивающие гибкую обратную связь.