

8.9.1. Эквивалентное представление стационарного
случайного процесса. Формирующий фильтр
Вычисление СКО наиболее просто, если случайный входной сигнал имеет вид белого шума. При воздействии на вход замкнутой системы белого шума f(t) с единичной спектральной плотностью ошибка системы может быть определена выражением
![]() ,
(8.73)
,
(8.73)
где
![]() -
импульсная переходная функция замкнутой
системы.
-
импульсная переходная функция замкнутой
системы.
Воспользовавшись теоремой Парсеваля, выражение (8.73) можно записать в виде:
![]() ,
(8.74)
,
(8.74)
где
![]() изображение
по Лапласу импульсной переходной
функции, т.е. передаточная функция
замкнутой системы.
изображение
по Лапласу импульсной переходной
функции, т.е. передаточная функция
замкнутой системы.
В реальных условиях на САУ действуют сигналы, отличные от белого шума. Поэтому для определения СКО при реальных возмущениях необходимо сформировать сигнал со спектральной плотностью, соответствующей реально действующему на САУ сигналу, для чего белый шум надо предварительно пропустить через линейный формирующий фильтр.
Положим,
что воздействие
![]() на входе САУ является реакцией
некоторого формирующего фильтра с
передаточной функцией Fф(p),
возбуждаемого белым шумом
на входе САУ является реакцией
некоторого формирующего фильтра с
передаточной функцией Fф(p),
возбуждаемого белым шумом
![]() единичного уровня
единичного уровня
![]() .
Тогда согласно формуле
(8.70) на
выходе фильтра и на входе САУ имеем
.
Тогда согласно формуле
(8.70) на
выходе фильтра и на входе САУ имеем
![]() ;
(8.75)
;
(8.75)
откуда передаточная функций формирующего фильтра
![]() .
.
Подключая фильтр в единую схему с системой, получаем эквивалентную передаточную функцию
![]() .
(8.76)
.
(8.76)
В результате любой стационарный случайный процесс можно представить эквивалентным ему процессом на выходе формирующего фильтра при воздействии на его вход белого шума. Такое представление реального сигнала облегчает определение СКО, так как позволяет анализировать САУ методами для входного белого шума.
8.9.2. Расчет флуктуационных ошибок и ошибок
от задающих воздействий
Предположим,
что на вход системы (рис.8.12)
поступает помеха f(t),
а полезный сигнал x(t)=0.
Требуется определить флуктуационную
ошибку, вызываемую отработкой системы
помехи на ее входе. Спектральная плотность
помехи равна
![]() .
Передаточная функция системы известна.
.
Передаточная функция системы известна.
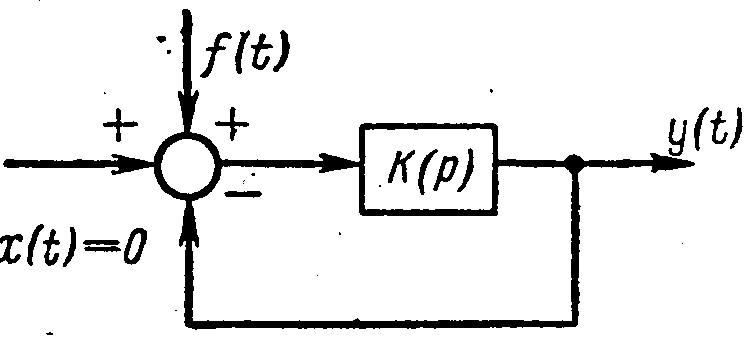
Рис. 8.12. К определению флуктуационной ошибки
Поскольку в этом случае весь сигнал на выходе системы представляет собой сигнал ошибки, спектральная плотность ошибки равна
![]() ,
(8.77)
,
(8.77)
где
![]() квадрат
амплитудно-частотной характеристики
замкнутой системы.
квадрат
амплитудно-частотной характеристики
замкнутой системы.
Для облегчения вычисления интеграла (8.74) и приведения его к табличному спектральную плотность входного сигнала представляем в виде
![]() .
(8.78)
.
(8.78)
Подставляя
(8.78) в
(8.77) и
обозначая
![]() ,
получим
,
получим
![]() .
(8.79)
.
(8.79)
Обычно
К0(Р)
—
рациональная
дробь,
![]() также может быть представлено в виде
рациональной дроби.
также может быть представлено в виде
рациональной дроби.
Учитывая (8.72) и (8.74), получим выражение для среднего квадрата ошибки в виде табличного интеграла:
![]() ,
(8.80)
,
(8.80)
где многочлены под интегралом
![]()
причем
![]() .
.
Таблицы интегралов до п = 6 приведены в литературе [9].
Если помеха действует не на входе системы, то вместо К0(р) берется передаточная функция Kyf(p), соответствующая месту приложения воздействия f.
Рассмотрим более общий случай, когда на систему помимо задающего воздействияx(t) действует одновременно помеха f(t)/
Суммарная ошибка
![]() .
.
Спектральная плотность ошибки
![]()
![]() (8.81)
(8.81)
где
![]()
и
![]()
представляют
собой взаимные спектральные плотности
полезного сигнала и помехи, а
![]() и
и
![]() —
частотные характеристики ошибки от
полезного сигнала и помехи. При отсутствии
корреляции между полезным сигналом и
помехой
—
частотные характеристики ошибки от
полезного сигнала и помехи. При отсутствии
корреляции между полезным сигналом и
помехой
![]()
и формула (8.81) упрощается:
![]() .
(8.82).
.
(8.82).
Для
помехи, приложенной совместно с задающим
воздействием, когда
![]() и при отсутствии корреляции между ними
получим
и при отсутствии корреляции между ними
получим
![]() (8.83).
(8.83).
Средний квадрат ошибки
![]() ,
(8.84)
,
(8.84)
где
![]() (8.85)
(8.85)
-
составляющая дисперсии ошибки, вызываемая
задающим воздействием
![]() ;
;
![]() (8.86)
(8.86)
- составляющая дисперсии ошибки, вызываемая возмущающим воздействием f(t).
Среднеквадратическое значение суммарной ошибки системы
![]() .
(8.87)
.
(8.87)
Среднеквадратическую
ошибку системы, определяемую по
формуле
(8.87), не
следует смешивать со среднеквадратическим
отклонением
![]() ,
которое равно положительному
квадратному корню из дисперсии
,
которое равно положительному
квадратному корню из дисперсии
![]() .
.
Как следует из формулы (8.84) среднее значение квадрата ошибки зависит от структуры системы (вида ее передаточной функции и параметров) и от спектральных плотностей входного сигнала и помехи.
Для минимизации соответствующей составляющей ошибки системы необходимо уменьшать площадь под кривой произведения спектральной плотности входного сигнала на квадрат амплитудно-частотной характеристики.
Заменяя
в выражении
(8.85)
передаточную функцию ошибки на
передаточную функцию замкнутой системы
K0(p),
получим средний квадрат выходной
величины
![]() .
.
Если в задающем сигнале x(t) можно выделить воздействие в виде неслучайной составляющей mx(t), представляющей собой медленно меняющуюся функцию времени, и стационарный центрированный случайный процесс, т. е.
![]() ,
,
то точность системы можно оценить средним квадратом ошибки, равным сумме квадратов динамической и случайной ошибок:
![]()
или
![]() .
.
Здесь
![]() —
коэффициент, определяющий удельный вес
динамической ошибки;
—
коэффициент, определяющий удельный вес
динамической ошибки;
![]() ,
,
где D0, D1,D2,... — коэффициенты ошибки.
Для
случая, когда можно предположить, что
скорость изменения задающего воздействия
постоянна в течение рассматриваемого
интервала времени, т. е.
![]() ,
а помеха - белый шум, в соответствии с
(8.84) получим
для систем с астатизмом 1-го порядка
,
а помеха - белый шум, в соответствии с
(8.84) получим
для систем с астатизмом 1-го порядка
![]() .
.
Пример.
Определить средний квадрат суммарной
ошибки САУ с передаточной функцией
![]() ,
если на входе системы действует задающее
воздействие со спектральной плотностью
,
если на входе системы действует задающее
воздействие со спектральной плотностью
![]() и помеха со спектральной плотностью
и помеха со спектральной плотностью
![]() .
Ошибка системы определяется формулой
(8.84). Вторая
доставляющая ошибки уже была определена.
.
Ошибка системы определяется формулой
(8.84). Вторая
доставляющая ошибки уже была определена.
![]() .
.
Вычислим первую составляющую ошибки (от задающего воздействия).
Передаточная функция ошибки
![]() .
.
Представим спектральную плотность через сопряженные составляющие:
![]() .
.
Находим
 .
.
Табличный интеграл
![]() .
.
Окончательно получим
![]() .
.
Из
данного выражения следует, что для
уменьшения составляющей ошибки от
полезного сигнала необходимо увеличение
![]() ,
а для уменьшения составляющей ошибки
от помех
,
а для уменьшения составляющей ошибки
от помех
![]() нужно уменьшать.
нужно уменьшать.
Основным достоинством аналитического метода является возможность установления связи между величиной СКО и параметрами системы, что позволяет определять значения параметров системы, при которых СКО оказывается минимальной.
Лекция 30
План лекции:
-
Графоаналитический метод расчета случайных ошибок САУ.
-
Оценка флуктуационных ошибок, обусловленных широкополосными
воздействиями.
-
Расчет дисперсии помехи с помощью корреляционной функции.
-
Определение флуктуационных ошибок с помощью электронной модели
-
Рекомендуемая литература [9].