

-
Синтез последовательного корректирующего устройства.
-
Синтез параллельного корректирующего устройства.
3. Рекомендуемая литература [1,3,4,5 ].
6.6. Синтез последовательного корректирующего устройства
Включение корректирующего устройства (КУ) в основную цепь системы последовательно с основными элементами системы показано на рис. 6.9.
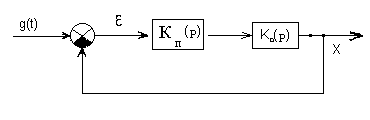
Рис. 6.9
Применительно к принятым на рисунке обозначениям можно написать:
Wc(р) = Kп(р)K0(р),
или Wc(i)= Kп(i)K0(i), (6.6)
где Wc(i) выражение для АФЧХ разомкнутой скорректированной системы. На основании (6.6) имеем
20lgWc(i) = Hc()дБ = Нж.дБ() = Нп.дБ()+ Но.дБ(), (6.7)
где Нс.дБ() - ЛАЧХ скорректированной системы, которая должна совпадать с желаемой ЛАЧХ. Из выражения (6.7) следует,что
Нп.дБ ()=Нж.дБ () - Но.дБ () . (6.8)
Из приведенных соотношений вытекает следующий порядок выполнения расчетов при синтезе САУ с последовательным КУ:
-
Строится ЛЧАХ исходной нескорректированной системы (располагаемая ЛАХ).
-
По заданным требованиям к качеству переходного процесса и к точности САУ строится ЛАЧХ скорректированной системы, т.е. желаемая ЛАЧХ.
3. Учитывая, что в минимально-фазовых системах (какими являются в основном системы регулирования) имеется однозначная связь между амплитудными и фазовыми характеристиками, по имеющимся ЛАЧХ строят соответствующие ЛФЧХ и определяют запасы по фазе и по амплитуде.
4. Вычитанием ЛАЧХ исходной системы из ЛАЧХ скорректированной системы получают ЛАЧХ, корректирующего устройства Нп.дБ().
5. По полученной ЛАЧХ корректирующего устройства подбирается наиболее простое по техническому исполнению корректирующее устройство.
6. Если ЛАЧХ выбранного корректирующего устройства будет несколько отличаться от расчетной, то необходимо построить окончательную ЛАЧХ скорректированной системы и по ней проверить полученные показатели переходного процесса.
6.7. Синтез параллельного корректирующего устройства
Задана передаточная функция разомкнутой цепи K0(p). Требуется ввести корректирующую обратную связь Z(p) так, чтобы система в целом (рис. 6.10) обладала желаемой частотной характеристикой.
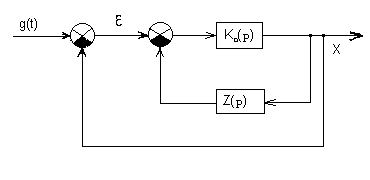
Рис. 6.10
Передаточная функция разомкнутой цепи с коррекцией равна
![]() .
(6.9)
.
(6.9)
Следовательно
![]() .
.
Чтобы избавиться от суммы под знаком логарифма, запишем приближенное выражение
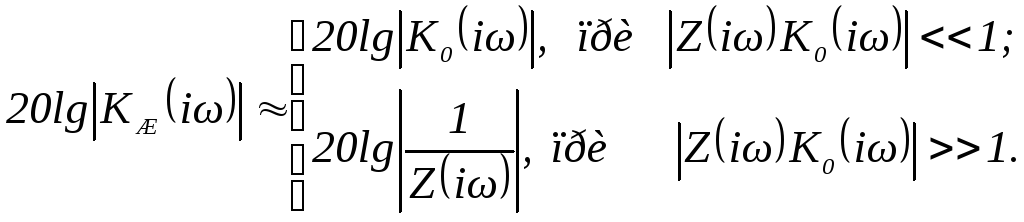 (6.10)
(6.10)
Построим ЛАЧХ неизменной части системы с передаточной функцией К0, имеющей желаемый коэффициент усиления, а также желаемую ЛАФЧ Кж (рис. 6.11).
.
В качестве искомой характеристики 1/Z(p) примем характеристику, обозначенную на рис. 6.11 точечным пунктиром и совпадающую в средней части с Кж. Вычтем 1/Z из характеристики К0 . Получим
![]() .
.
Этот результат показан на рис. 6.11 штрихпунктирной линией. Из графика видно, что на участке CD характеристикаZK0>1, а до точки С и после точки D характеристика ZK0<1 так как ось абсцисс соответствует значению амплитуды, равному 1 (20 lg А=0).
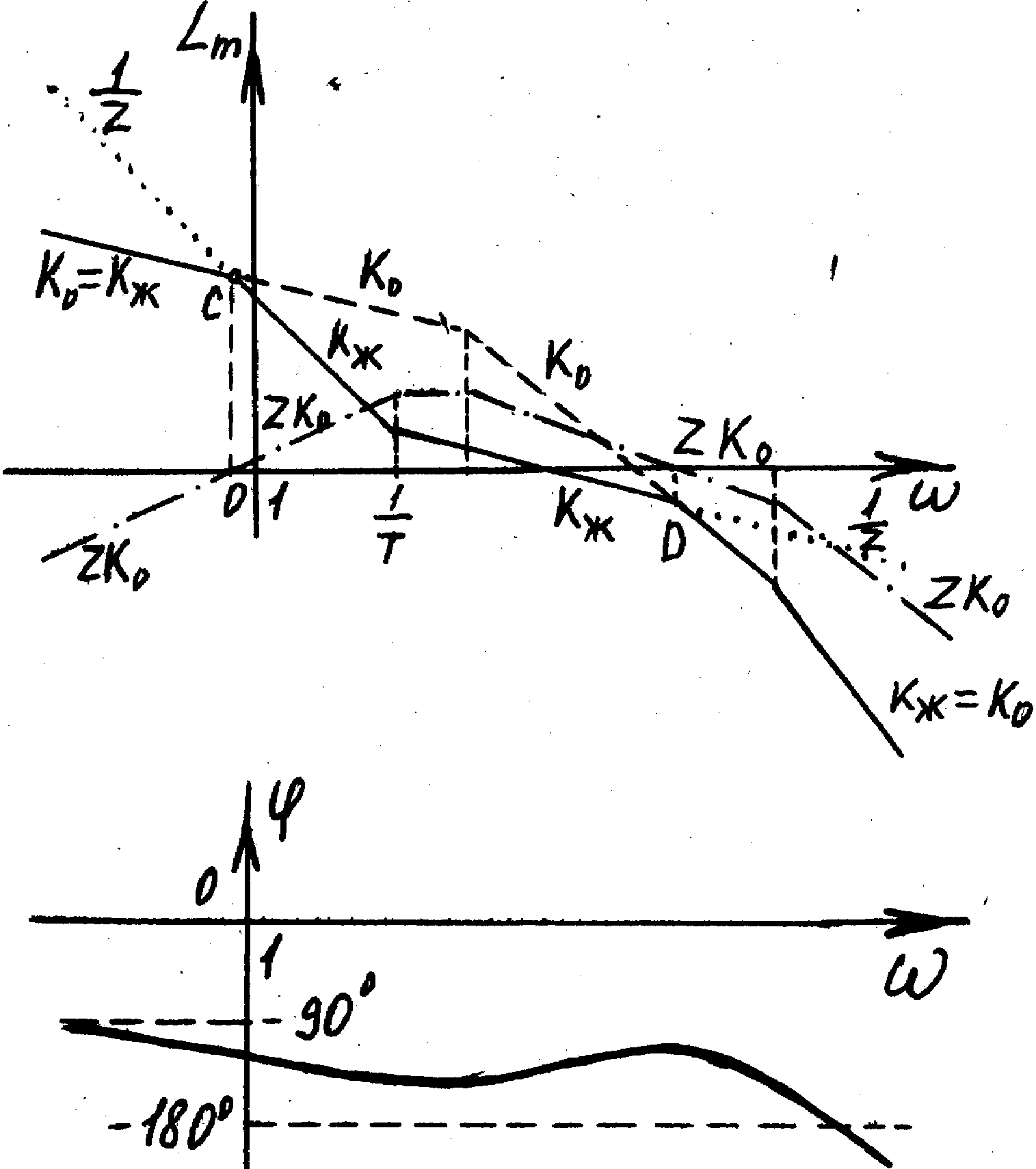
Рис.6.11
Следовательно, при принятом очертании исходной характеристики 1/Z удовлетворяются написанные выше приближенные равенства (6.10).
Таким
образом, найдено параллельное
корректирующее устройство в виде
обратной связи, которое создает для
системы
в целом
близкую к желаемой частотную характеристику.
Согласно рис.6.11 логарифмическая
характеристика
![]() получит вид,
представленный
на рис.
6.12, что
соответствует следующей передаточной
функции искомой корректирующей обратной
связи:
получит вид,
представленный
на рис.
6.12, что
соответствует следующей передаточной
функции искомой корректирующей обратной
связи:
![]() .
.
Это есть гибкая инерционная обратная связь с двойным дифференцированием (т.е. обратная связь по угловому ускорению исполнительного привода следящей системы).



 1/T
1/T

Рис. 6.12