

6.5. Методы коррекции динамических свойств системы,
ОСНОВАННЫЕ НА ПРЕОБРАЗОВАНИИ СИГНАЛОВ ОШИБКИ
Как известно, принцип автоматического управления связан с воздействием автоматического регулятора на регулируемый объект в зависимости от величины сигнала ошибки. В общем случае управление можно осуществлять не только по сигналу ошибки, но и в зависимости от производных и интегралов от ошибки.
Закон управления в этом случае можно представить следующим образом:
![]() ,
(6.1)
,
(6.1)
где y(t)- закон управления;
x(t)- сигнал ошибки;
![]() -
символ дифференцирования или интегрирования
в зависимости
-
символ дифференцирования или интегрирования
в зависимости
от знака j;
![]() -
постоянные коэффициенты.
-
постоянные коэффициенты.
Закон регулирования (6.1) в общем виде практически реализовать нельзя, также, как нельзя создать идеальную САР. Поэтому на практике ограничиваются реализацией частных случаев закона регулирования, оставляя в выражении (6.1) 2-3 слагаемых. Например, в системах стабилизации ЛА по угловым координатам применяют законы управления по углу, угловой скорости, угловому ускорению и интегралу от угла отклонения ЛА.
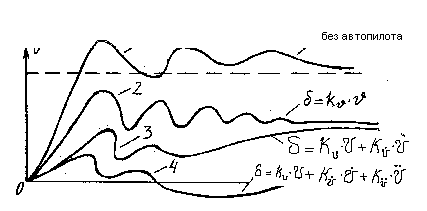
На рис.6.3 приведены графики изменения угла тангажа при действии постоянного возмущающего момента для различных законов регулирования в автопилоте (АП).
При отсутствии АП (кривая 1) колебания ЛА затухают под действием аэродинамических моментов, возникающих при вращении ЛА вокруг его поперечной оси.
Применение АП с законом регулирования по углу отклонения ЛА (кривая 2) несколько увеличивает колебательность системы, однако установившаяся ошибка существенно уменьшается. Регулирование по углу и угловой скорости (кривая 3), не уменьшая установившуюся ошибку, дает более интенсивное затухание колебании ЛА. При соответствующем выборе параметров АП, переходный процесс может быть апериодическим.
Астатический автопилот, осуществляющий регулирование по углу, угловой скорости и угловому ускорению (кривая 4), обеспечивает необходимое затухание колебании и ликвидирует установившуюся ошибку.
Лекция 18
План лекции:
1. Построение желаемой ЛАХ.
2. Желаемые ЛАХ следящих систем.
3. Рекомендуемая литература [1, 8, 5, 3 ].
6.5. Динамический синтез сау, основанный
НА ПОСТОРОЕНИИ ЖЕЛАЕМОЙ ЛАЧХ
Широкое применение при синтезе САУ нашел метод логарифмических частотных характеристик (ЛЧХ). Этот метод обладает достаточной простотой и наглядностью. Идея метода основана на известной связи между переходным процессом и логарифмической амплитудной частотной характеристикой (ЛАЧХ). Зная желаемый вид переходного процесса, легко построить соответствующую такому процессу желаемую ЛАЧХ. Далее к виду желаемой ЛАЧХ приближают исходную ЛАЧХ некорректированной системы. Желаемая ЛАЧХ разомкнутой системы строится исходя из требовании, предъявляемых к системе.
Основными из них считаются: коэффициент усиления (определяемый точностью ее работы), порядок астатизма системы, время переходного процесса, запас устойчивости по фазе (определяемый величиной перерегулирования).
Желаемая ЛАЧХ может быть разделена на три части: низкочастотную, среднечастотную и высокочастотную ( рис. 6.4).
1. Низкочастотная часть ЛАЧХ определяется требуемой точностью работы системы, которая зависит от коэффициента усиления системы в разомкнутом состоянии и порядком ее астатизма.
Частотный интервал низкочастотной части характеристики лежит в пределах от минимальных начальных частот до частот первого сопряжения аппроксимированной характеристики. Наклон начального низкочастотного отрезка характеристики определяется величиной (– 20ν дБ/дек), где ν - порядок астатизма системы. Указанный начальный отрезок характеристики должен переходить через точку с ординатой 20lgk , и абсциссой, равной 1, где k - требуемый коэффициент усиления системы.
2. Среднечастотная асимптота желаемой ЛАЧХ определяет качество CAP. Установлено, что удовлетворительное качество регулирования получается в том случае, если наклон ЛАЧХ в области частоты среза с составляет (- 20 дБ/дек).
Частота среза определяется требуемым временем переходного процесса tпп и перерегулированием % :
![]() ,
,
где k0 выбирается в зависимости от допустимой величины перерегулирования.
Так, при допустимом перерегулировании % =15… 30% выбирается k0=1,3…2,5.
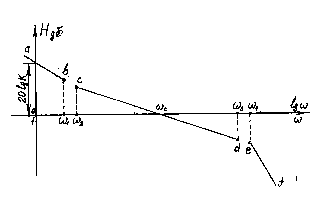
Рис. 6.4
Частоты сопряжения центрального отрезка среднечастотной части ЛАЧХ, пересекающего ось абсцисс при частоте с, с предыдущим и последующим отрезками могут быть выбраны в соответствии с обозначениями, приведенными на рис. 6.4, исходя из следующих соображений.
Величину центрального отрезка можно определять также по частотным интервалам, так, чтобы интервалы ( 2- с ) и ( с- 3 ) были равны 0,5…0,9 декады. Здесь следует брать интервалы тем больше, чем более высокое качество требуется от переходного процесса чем больше величины интервалов ( 2- с) и ( с- 3) быстрее затухает переходной процесс, поэтому окончательный выбор этих интервалов должен быть согласован с требованиями к переходному процессу.
Сопряжение центрального отрезка ЛАЧХ с низкочастотной частью производится прямой с наклоном - ( 40 60) дБ/дек.
Так как высокочастотная асимптота ЛАЧХ мало влияет на вид переходного процесса, то для того, чтобы не усложнять КУ, она выбирается аналогичной ЛАЧХ исходной нескорректированной системы, обычно ее наклоны составляют - ( 40 60) дБ/дек. В литературе известны и другие подходы к выбору и построению желаемой ЛАЧХ в зависимости от типа проектируемой системы и от требовании к ее динамическим свойствам. Так, выбор желаемых запасов устойчивости по фазе и амплитуде Н дБ в зависимости от допустимого перерегулирования % можно производить по графикам, приведенным на рис. 6.5.
Частоту среза можно выбирать таким образом, чтобы выполнялось следующее неравенство:
с min ≤ c ≤ c opt ,
где c opt =2/Tmin - частота среза, соответствующая оптимальному переходному процессу, т.е. процессу с наименьшим временем переходного процесса Tmin. Время оптимального переходного процесса Tmin определяется по формуле:
![]() ,
(6.2)
,
(6.2)
где gmax -максимальное значение второй производной от регулируемой величины x, соответствующее оптимальному переходному процессу;
хmax - максимальное допустимое значение регулируемой величины.
На рис. 6.6 приняты следующие обозначения:
max - максимально допустимое перерегулирование;
t max - максимально допустимое время переходного процесса;
Umax - максимальное значение вещественной частотной характеристики.
![]() ,
k
= 0, 1, 2, 3, ...
,
k
= 0, 1, 2, 3, ...
Графики функции t max и max ( рис. 6.6) справедливы для случая, когда вещественная частотная характеристика имеет вид, показанный на рис. 6.7 при определенном соотношении координат U(0), Umin ,Umax и ωi .
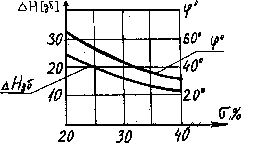
Рис. 6.5
Минимальное значение частоты среза с min определяют по графикам,
показанным на рис. 6.6.
Выполнение неравенства (6.1) гарантирует перерегулирование и время переходного процесса не выше заданных.
При построении желаемой ЛАХ следящих систем первого порядка астатизма можно использовать следующие рекомендации.
Низкочастотная асимптота проводится так, чтобы она имела наклон (- 20) дБ/дек, соответствующий астатизму первого порядка.
Продолжение асимптоты должно пересечь ось частот при частоте, равной желаемой добротности по скорости:
 ,
(6.3)
,
(6.3)
где С1 - заданный коэффициент ошибки.
.
При однократном изломе в точке В (рис. 6.8 ) первая сопрягающая частота определяется по формуле
 ,
(6.4)
,
(6.4)
где DW= 2/С2 - добротность системы пo ускорению, а при двукратном изломе - по формуле
 .
(6.5)
.
(6.5)
1.0 1.1 1.2 1.3 1.4 1.5 Umax
Рис. 6.6 Рис.6.7
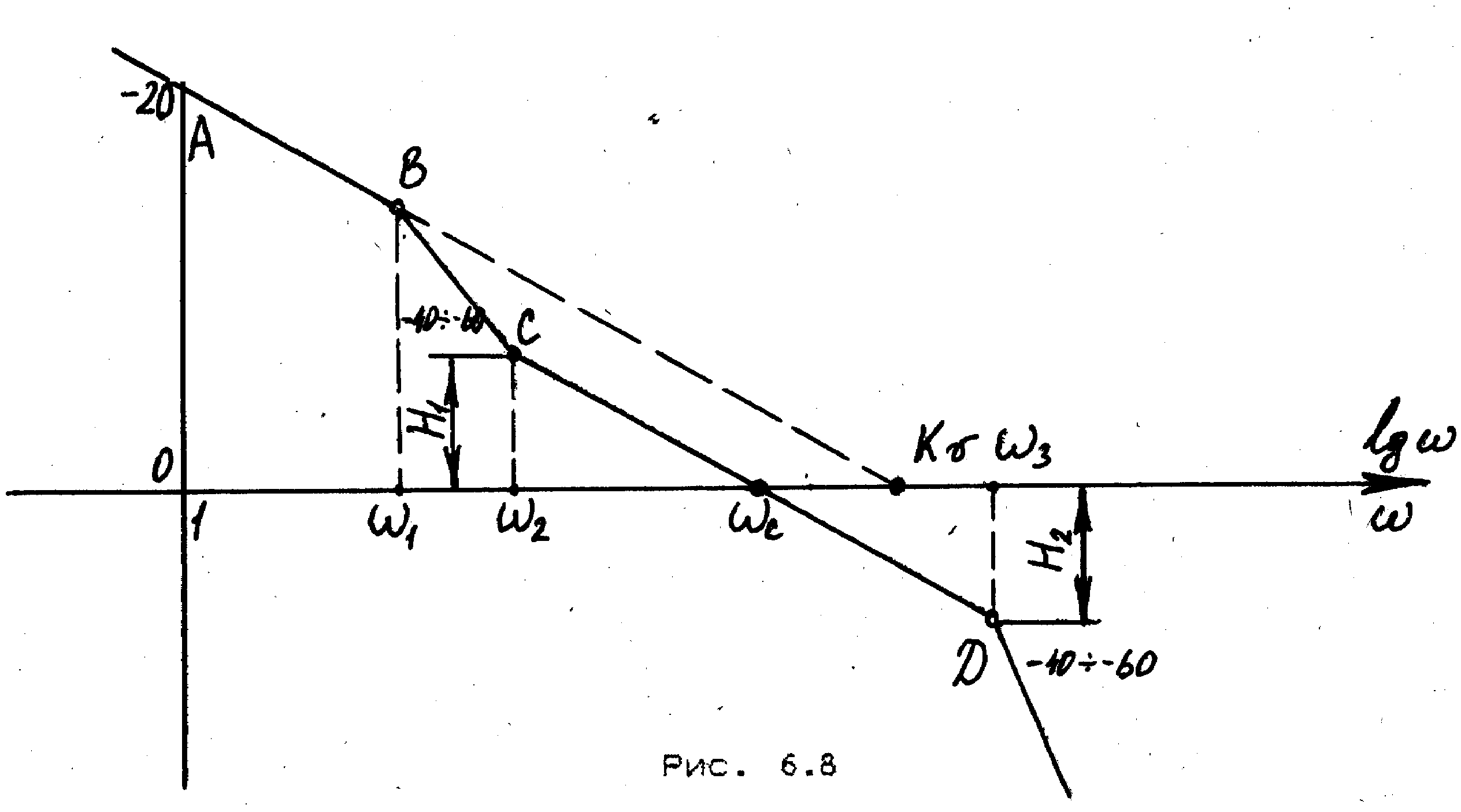
Рис.6.8
Для облегчения построения желаемой ЛАЧХ вводятся типовые передаточные функции и им соответствующие ЛАЧХ.
При построении желаемой ЛАЧХ нужно следить, чтобы она, как можно меньше отличалась от располагаемой ЛАЧХ, что необходимо для упрощения КУ. Это замечание особенно относится к низкочастотной и высокочастотной частям ЛАЧХ. Желательно делать так, чтобы, по крайней мере, первая низкочастотная и последняя высокочастотная асимптоты обеих ЛАЧХ сливались вместе. Совпадение низкочастотных асимптот ЛАЧХ достигается за счет выбора соответствующего коэффициента усиления, равного требуемому. Совпадение высокочастотных асимптот достигается, соответствующим выбором желаемой ЛАЧХ в высокочастотной области.
После формирования всей желаемой ЛАЧХ необходимо проверить, выдерживается ли требуемое значение запаса по фазе, определяемое из графика на рис. 6.5 для модулей, лежащих в пределах:
Н1 Н( ) Н2.
Для этой проверки необходимо подсчитать фазовый сдвиг в двух крайних точках среднечастотной асимптоты, имеющей наклон (- 20) дБ/дек, т.е. при частотах 2 и 3 Подсчет фазового сдвига делается на основании принятой желаемой передаточной функции. Так, например, для передаточной функции типа (20…40…20…40) он равен
= -90- arctgT1 + arctgT2 - arctgT3.
Если требуемый запас по фазе не выдержан, то необходимо расширить среднечастотный участок и произвести вновь проверку.
Чтобы окончательно убедиться в приемлемости сформированной ЛАЧХ, можно по известной желаемой передаточною функции построить любым методом переходный процесс и проверить величины % и tпп.
Далее из ординат желаемой ЛАЧХ вычитаются ординаты располагаемой ЛАЧХ. Получившаяся ЛАЧХ соответствует передаточной функции последовательного корректирующего звена. При необходимости это звено может быть пересчитано на эквивалентную обратную связь или эквивалентное параллельное корректирующее звено.
Лекция 19
План лекции: