

Лекция 22
План лекции:
-
Детерминированные и случайные функции.
-
Основные вероятностные характеристики случайных процессов.
-
Рекомендуемая литература [9].
8.1. Детерминированные и случайные функции
До сих пор поведение САУ исследовалось при определенных, заданных во времени управляющих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т.д.). При этих условиях состояние системы может быть точно предсказано для любого момента времени заранее. Система полностью определена и называется в этом смысле детерминированной.
Однако во многих случаях характер воздействия бывает таким, что его нельзя считать определенной функцией времени. Воздействие может принимать с течением времени самые разнообразные случайные значения. В таких случаях мы можем оценить только вероятность появления той или иной формы воздействия в тот или иной момент времени. Это происходит потому, что сама природа реального управляющего или возмущающего воздействия такова, что его величина в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом.
Строго оптимальное поведение системы при наличии случайных воздействий неосуществимо. Однако можно говорить о наиболее вероятном приближении к тому или иному оптимуму. Обычно при этом приходится идти на определенный компромисс.
Случайная
функция отличается от регулярной тем,
что мы не можем утверждать, что она в
данный момент времени будет иметь
определенное значение. Мы можем говорить
лишь о вероятности того, что в данный
момент t=t![]() значение функции x(t
значение функции x(t![]() )
заключается между значениями x
и x+
)
заключается между значениями x
и x+![]() x.
Понятие случайной функции – это
обобщенное понятие, и говорить о значении
функции в данный момент мы, в сущности,
не можем. Однако в конкретно наблюдаемой
кривой случайного процесса эти значения
существуют. Конкретно наблюдаемая
кривая случайного процесса называется
реализацией случайной функции. Реализации
могут иметь и определенные значения, и
определенные производные (рис.8.1).
Множество различных реализаций и
обобщается понятием “случайная функция”.
x.
Понятие случайной функции – это
обобщенное понятие, и говорить о значении
функции в данный момент мы, в сущности,
не можем. Однако в конкретно наблюдаемой
кривой случайного процесса эти значения
существуют. Конкретно наблюдаемая
кривая случайного процесса называется
реализацией случайной функции. Реализации
могут иметь и определенные значения, и
определенные производные (рис.8.1).
Множество различных реализаций и
обобщается понятием “случайная функция”.
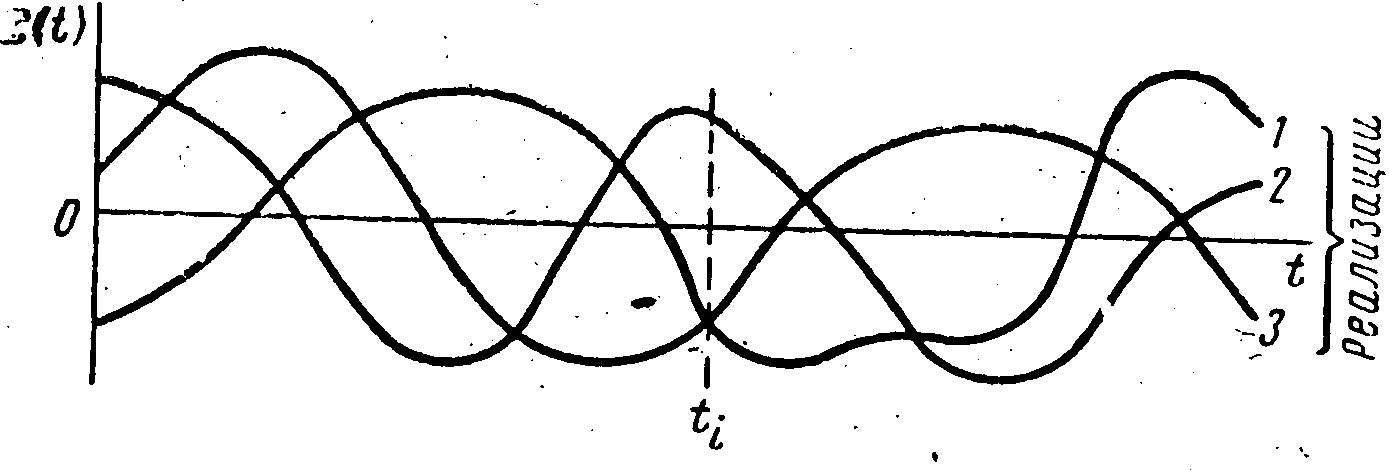
Рис. 8.1. Отдельные реализации случайной функции времени
Если график семейства реализаций случайной функции рассечь вертикальной линией, то получим случайную величину x(ti) для заданного момента времени ti.
8.2. Основные вероятностные характеристики
случайных процессов
8.2.1. Функция распределения и плотность вероятности
Для характеристики случайной функции служат функции распределения вероятности и плотности вероятности.
Под функцией распределения вероятности, часто называемой интегральным законом распределения, понимают вероятность того, что случайная величина примет значение меньше некоторого фиксированного значения.
Производная от функции распределения вероятности носит название плотности вероятности или дифференциального закона распределения.
Одномерная функция распределения вероятности относится только к одному какому-либо сечению случайной функции:
![]() (8.1)
(8.1)
Она показывает вероятность того, что текущее значение случайной функции x(t) в момент времени t=t1 меньше заданной величины х1.
Соответственно, одномерная плотность вероятности p1(x1,t1) есть производная от интегрального распределения вероятности F1(x1,t1) и имеет вид:
![]() .
(8.2)
.
(8.2)
Величина
![]() выражает
вероятность того, что случайная функция
x(t)
в момент
времени t=t1
находится в интервале от
x
выражает
вероятность того, что случайная функция
x(t)
в момент
времени t=t1
находится в интервале от
x![]() до
до
![]() .
.
Рассмотрим теперь всевозможные пары значений х, полученные в два разных момента времени: t1 и t2. Двумерное распределение вероятности имеет вид:
![]() .
(8.3)
.
(8.3)
Двумерное распределение вероятности относится к двум произвольным сечениям x(t1), x(t2) случайной функции и выражает вероятность того, что в момент времени t1 случайная функция x(t) меньше х1, а в момент t2 — меньше х2.Соответствующая двумерная плотность вероятности имеет вид
![]() .
(8.4)
.
(8.4)
Некоторые типы случайных процессов полностью характеризуются одномерными или двумерными плотностями вероятности. Например, так называемый чисто случайный процесс или «белый шум» полностью характеризуется одномерной плотностью вероятности.
Значения
x(t)
в этом процессе, взятые в различные
моменты времени t1,
t2,...,
совершенно независимы друг от друга.
Вероятность совпадения событий,
заключающихся в нахождении
x(t)
между х1
и
![]() в момент t=t1
и между x2
и
в момент t=t1
и между x2
и
![]() в момент t=t2
равна произведению вероятностей каждого
из этих событий. Поэтому
в момент t=t2
равна произведению вероятностей каждого
из этих событий. Поэтому
![]() (8.5)
(8.5)
т. е. все плотности вероятности определяются одномерными плотностями.
Примером процесса, полностью характеризуемого двумерной плотностью вероятности, служит Марковский случайный процесс. Это такой процесс, для которого вероятность нахождения x(t) в заданном интервале (xn, xn+dxn) в момент t=tn, зависит только от состояния в предшествующий момент tn-1 и совершенно не зависит от состояния в другие моменты времени, т.е. от более глубокой предыстории.
Стационарный случайный процесс есть аналог установившегося процесса в детерминированной системе. Статистический характер стационарного процесса неизменен во времени.
В строгом смысле стационарным случайным процессом называют такой процесс, в котором функции распределения всех порядков не зависят от положения начала отсчета времени, т.е.
![]()
(8.6)
![]()
Из этих соотношений следует, что одномерные функция распределения и плотность вероятности стационарного процесса вообще не зависят от времени т.е.
![]() (8.7)
(8.7)
Функции
распределения и плотности вероятности
второго порядка для стационарного
случайного процесса при одинаковых x1
и
x2
остаются
неизменными, если разность рассматриваемых
моментов времени
![]() постоянна:
постоянна:
![]() (8.8)
(8.8)
Для оценки точности линейных САУ при решении многих прикладных задач достаточно знать первые два момента процесса: математическое ожидание и корреляционную функцию. Эти характеристики являются неслучайными функциями или величинами и представляют собой результат вероятностного усреднения различных функций случайных процессов.
Свойства стохастических процессов, определяемые двумя первыми моментами, изучаются с помощью корреляционной теории. Кроме корреляционного анализа, основанного на прямом рассмотрении случайных сигналов во времени, существует также метод, основанный на рассмотрении частотных составляющих случайных сигналов, спектральный анализ. Корреляционный и спектральный анализы широко используются в инженерной практике.