

8.9.3. Графоаналитический метод расчета
В
инженерной практике для систем управления
высокого порядка применяют приближенный
графоаналитический метод определения
случайных ошибок. Его удобно применять,
если спектральные плотности задающего
воздействия
![]() и помехи
и помехи
![]() и амплитудно-частотные характеристики
заданы графически или описываются
сложными выражениями. Метод является
наглядным и позволяет сразу решить, как
нужно изменить частотные характеристики
системы, чтобы уменьшить ошибку, вызванную
случайным сигналом.
и амплитудно-частотные характеристики
заданы графически или описываются
сложными выражениями. Метод является
наглядным и позволяет сразу решить, как
нужно изменить частотные характеристики
системы, чтобы уменьшить ошибку, вызванную
случайным сигналом.
Рассмотрим этот метод применительно к вычислению ошибки от помех.
Поскольку
спектральная плотность ошибки
![]() функция
четная, то можно записать
функция
четная, то можно записать
![]() .
(8.88)
.
(8.88)
Имея в виду, что
![]() ,
(8.89)
,
(8.89)
при
известных передаточной функции системы
![]() и спектральной плотности стационарного
случайного воздействия на входе
системы
и спектральной плотности стационарного
случайного воздействия на входе
системы
![]() можно предложить следующий порядок
расчета среднеквадратической ошибки.
можно предложить следующий порядок
расчета среднеквадратической ошибки.
1.
Строится АЧХ замкнутой системы
![]() (рис.
8.13). Ординаты
этой кривой возводятся в квадрат и
строится кривая
(рис.
8.13). Ординаты
этой кривой возводятся в квадрат и
строится кривая
![]() .
.
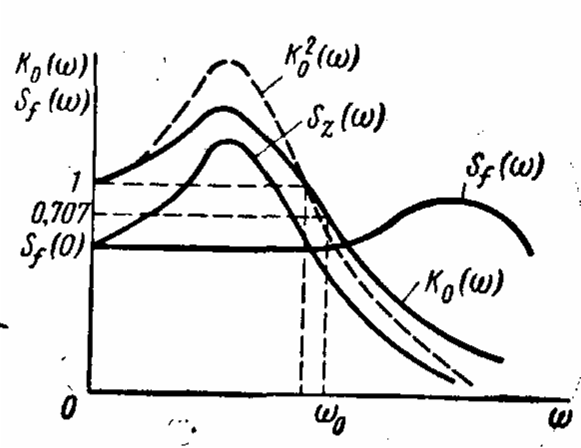
Рис. 8.13. К графоаналитическому определению флуктуационной ошибки
2.
Строится кривая спектральной плотности
![]() для случайного сигнала ошибки. Для этого
значение спектральной плотности на
входе
для случайного сигнала ошибки. Для этого
значение спектральной плотности на
входе
![]() умножается на величину квадрата АЧХ
системы для каждой данной частоты.
умножается на величину квадрата АЧХ
системы для каждой данной частоты.
3.
Определяется значение интеграла
![]() .
Для этого подсчитывается площадь,
заключенная между кривой
.
Для этого подсчитывается площадь,
заключенная между кривой
![]() и осью абсцисс.
и осью абсцисс.
-
Средний квадрат ошибки в соответствии с формулой (8.86) определяется путем деления найденной площади на
 ,
т. е.
,
т. е.
![]() .
(8.90)
.
(8.90)
Среднеквадратическая ошибка вычисляется по формуле:
![]() .
(8.91)
.
(8.91)
График
спектральной плотности ошибки
![]() можно также рассчитать, пользуясь
логарифмическими частотными
характеристиками (ЛЧХ). По заданному
значению К(р)
определяют логарифмические
амплитудно-частотные (ЛАЧХ) и
фазо-частотные характеристики (ЛФЧХ)
разомкнутой
можно также рассчитать, пользуясь
логарифмическими частотными
характеристиками (ЛЧХ). По заданному
значению К(р)
определяют логарифмические
амплитудно-частотные (ЛАЧХ) и
фазо-частотные характеристики (ЛФЧХ)
разомкнутой
![]() системы, затем находят ЛАЧХ замкнутой
системы
системы, затем находят ЛАЧХ замкнутой
системы
![]() ,
ее значения удваивают, т. е. определяют
,
ее значения удваивают, т. е. определяют
![]() .
Значения
.
Значения
![]() суммируются с величиной
суммируются с величиной
![]() .
В результате получаем
.
В результате получаем
![]() .
.
Для определения ошибки поступают далее так же, как и в пп. 3 и 4.
Как
видно из соотношения
(8.89),
флуктуационная ошибка в общем случае
зависит от взаимного расположения
графиков
![]() и
и
![]() (рис.8.13). При совпадении максимумов
характеристик флуктуационная ошибка
оказывается большой, и наоборот,
разнесение этих максимумов выбором
параметров системы приводит к уменьшению
флуктуационной ошибки. Это следует
учитывать при расчете САУ.
(рис.8.13). При совпадении максимумов
характеристик флуктуационная ошибка
оказывается большой, и наоборот,
разнесение этих максимумов выбором
параметров системы приводит к уменьшению
флуктуационной ошибки. Это следует
учитывать при расчете САУ.
Уменьшения
флуктуационной ошибки можно также
добиться путем уменьшения пика АЧХ, т.
е. выполнением системы более
узкополосной и достаточно задемпфированной
(уменьшить
![]() –
частоту
среза разомкнутой системы).
–
частоту
среза разомкнутой системы).
8.9.4. Оценка флуктуационных ошибок, обусловленных
широкополосными воздействиями
Во
многих случаях воздействие обладает
широкополосным спектром и в пределах
полосы пропускания САУ оказывается
практически постоянным
![]() (рис.
8.13). При
этих условиях флуктуационную ошибку с
определенным приближением можно
вычислить по формуле:
(рис.
8.13). При
этих условиях флуктуационную ошибку с
определенным приближением можно
вычислить по формуле:
![]() ,
(8.92)
,
(8.92)
где
![]() - полоса шумов САУ (эффективная полоса
пропускания системы). Полосу шумов
- полоса шумов САУ (эффективная полоса
пропускания системы). Полосу шумов
![]() можно определить аналитически, пользуясь
теоремой Парсеваля:
можно определить аналитически, пользуясь
теоремой Парсеваля:
![]() .
.
Заменяя
![]() на р,
получим
на р,
получим
![]() ,
(8.93)
,
(8.93)
т.
е. полоса шумов равна табличному интегралу
![]() ,
полиномы числителя и знаменателя
подынтегрального выражения которого
совпадают с соответствующими полиномами
передаточной функции системы, умноженному
на
,
полиномы числителя и знаменателя
подынтегрального выражения которого
совпадают с соответствующими полиномами
передаточной функции системы, умноженному
на
![]() .
.
В
табл.
8.1 приведены
значения
![]() для некоторых элементарных звеньев и
систем, выраженные через их параметры.
для некоторых элементарных звеньев и
систем, выраженные через их параметры.
Учитывая,
что спектральная плотность шума Sf(0)=Sf
постоянна и задана на ограниченной
полосе частот от
![]() до
до
![]() ,
иногда удобно использовать определение
дисперсии на выходе системы
,
иногда удобно использовать определение
дисперсии на выходе системы
![]() ,
,
где - дисперсия на входе системы.
- дисперсия на входе системы.
Пример
1.
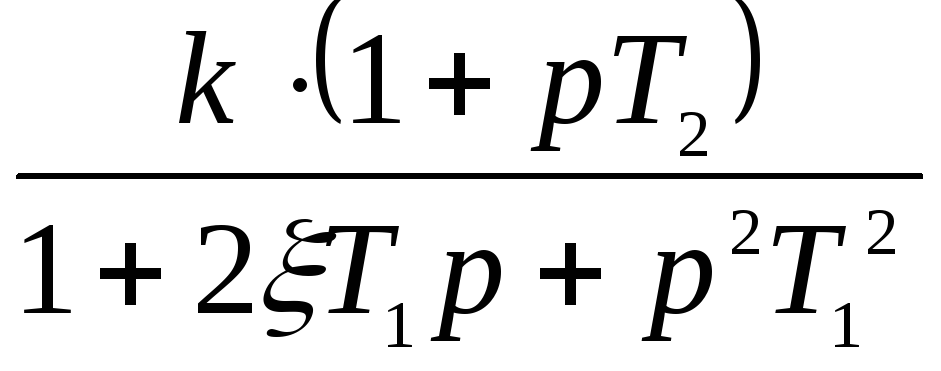
Определить
![]() системы с передаточной функцией
системы с передаточной функцией
![]() .
.
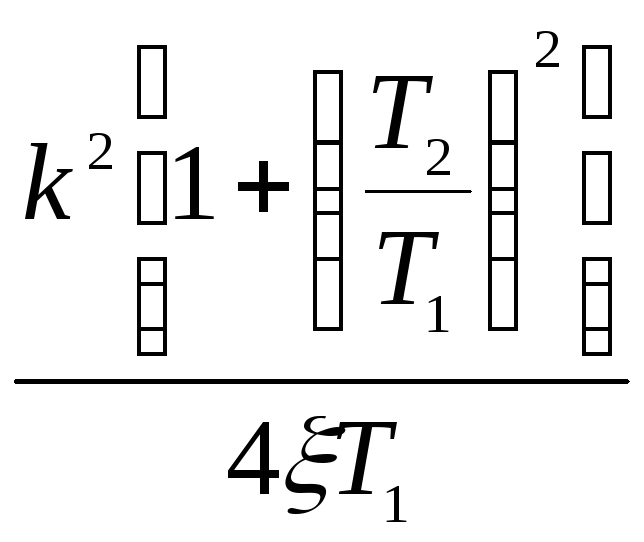
Передаточная функция замкнутой системы
![]() .
.
Следовательно,
![]() .
.
Для приближенных расчетов можно положить
![]() ,
,
где
![]() —
частота среза разомкнутой системы;
—
частота среза разомкнутой системы;
![]() —
полоса
пропускания замкнутой системы.
—
полоса
пропускания замкнутой системы.
Таблица 8.1
|
K(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример
2.
Рассчитать флуктуационную ошибку САУ,
имеющей частоту среза
![]() =11сек-1
и запас по фазе
=11сек-1
и запас по фазе
![]() =45°.
=45°.
По приближенным соотношениям находим
![]() .
.
Флуктуационная ошибка
![]() .
.
Полоса шумов по формуле (8.93)
![]() .
.
Флуктуационная ошибка
![]() .
.
Следовательно, приближенный метод расчета флуктуационной ошибки при приемлемых запасах устойчивости имеет достаточную точность.
Лекция 31
План лекции:
-
Расчет дисперсии помехи с помощью корреляционной функции.
-
Вычисление среднеквадратической ошибки следящей системы.
-
Рекомендуемая литература [9].