

-
Д–разбиение в плоскости двух действительных параметров.
-
Суждение об устойчивости системы по ее линейной модели.
-
Рекомендуемая литература [1, 4].
-
Д–разбиение плоскости двух действительных параметров
Рассмотрим методику Д–разбиения плоскости двух действительных параметров для системы второго порядка.
Положим, что неизвестные параметры и входят в характеристическое уравнение линейно
Д(р)=S(p)+Q(p)+N(p). (4.35)
Уравнение граничной кривой в этом случае принимает вид
Д(i)=S(i)+Q(i)+N(i)=0. (4.36)
Выделяя действительную и мнимую части в уравнении (4.36) и приравнивая их к нулю, получим
S1()+Q1()+N1()=0; (4.37)
S2()+Q2()+N2()=0,
где S1(),S2() и Q1(),Q2() – полиномы от .
Уравнения (4.37) решаем относительно неизвестных параметров
 ;
(4.38)
;
(4.38)
 ,
(4.39)
,
(4.39)
т.е. 1=-N1()Q2()+N2()Q1();
2=-N2()S1()+N1()S2(); (4.40)
=S1()Q2()-S2()Q1().
Уравнения (4.38) и (4.39) является уравнениями граничной кривой в плоскости [;], которая строится при изменении частоты oт - до +. При этом уравнения (4.38) и (4.39) является уравнениями прямых на плоскости [;]. Их совместное решение соответствует точке пересечения этих прямых, т.е. точке граничной кривой при фиксированном значении частоты. Совокупность этих точек при различных значениях частоты и образуют граничную кривую. Если при каком-то значении частоты один из определителей (4.40) обращается в нуль, то это говорит о том, что уравнения (4.38) и (4.39) являются следствием одно другого. В этом случае вместо точки граничной кривой получается прямая, которую называют особой прямой. На плоскости параметров и можно построить еще две особые прямые. Уравнения этих прямых получаются путем приравнивания коэффициентов ао и аn , если они зависят от параметров и .
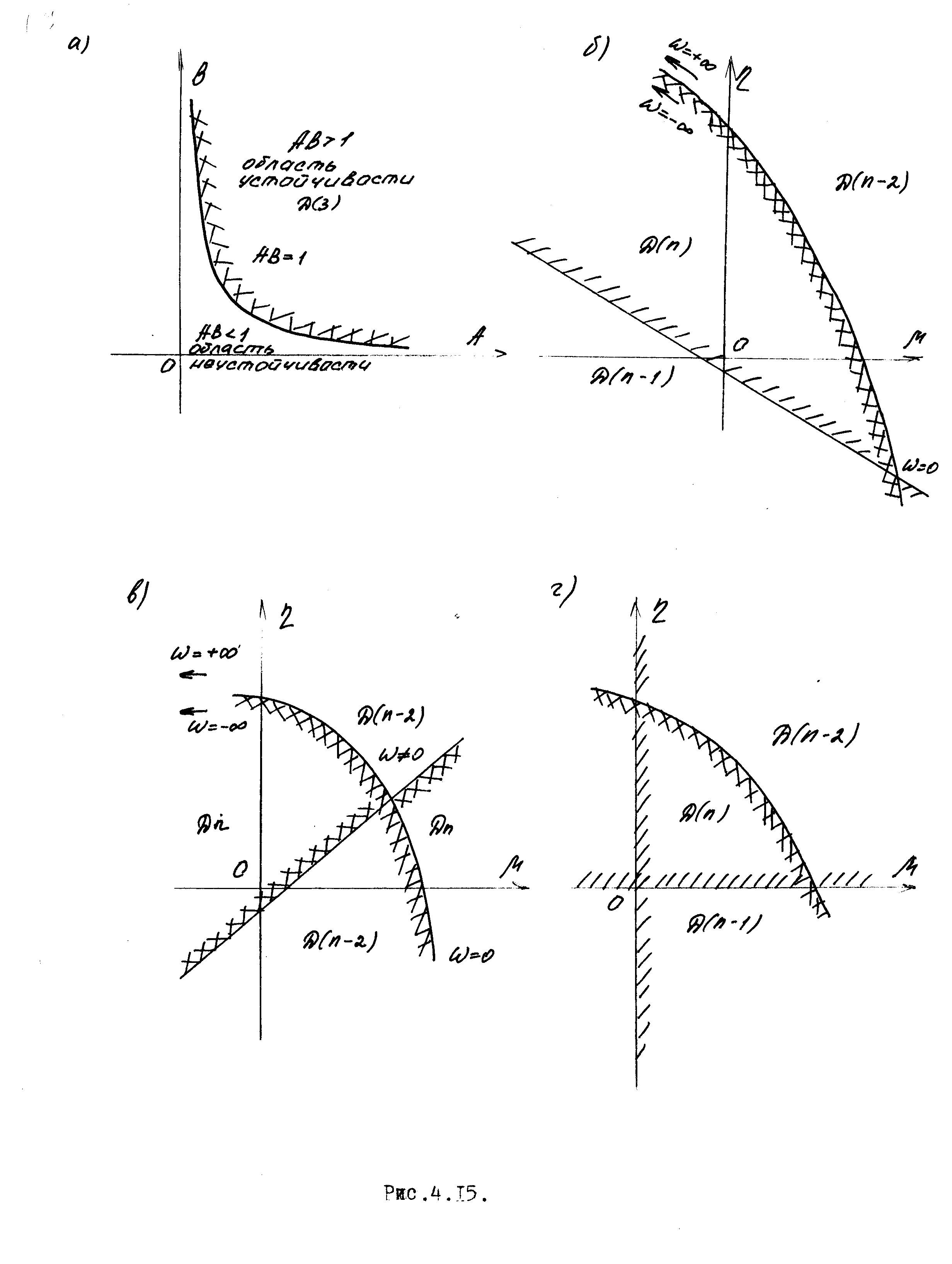
Рис. 4.15
Таким образом, в разметке областей в плоскости двух действительных параметров участвуют граничная кривая и особые прямые. Для разметки областей используют следующее правило штриховки. В направлении изменения частоты от - до + граничную кривую штрихуют слева, если >0 и справа, если <0. При =0 определитель , как правило, принимает нулевое значение и меняет свой знак. Через эту же точку обычно проходит особая прямая. Особые прямые штрихуют таким образом, чтобы заштрихованные стороны граничной кривой и особых прямых лежали бы друг против друга (рис. 4.15б). Область, имеющая внутреннюю штриховку, должна соответствовать устойчивому состоянию системы. Проверку этого предположения можно выполнить так же, как и в предыдущем случае.
Некоторые особые случаи:
-
Если при =0, принимает нулевое значение, но не изменяет свой знак, и если через эту точку на плоскости проходит особая прямая, то она не штрихуется и при разметке областей не принимается во внимание.
-
Если при 0 принимает нулевое значение и изменяет свой знак, и если через эту точку на плоскости проходит особая прямая, то она штрихуется дважды (рис.4.15,в).
-
Если тождественно равняется нулю, то Д–разбиение плоскости двух параметров производят только особыми прямыми.
Особые прямые, участвующие в Д–разбиении, часто совпадают с осями координат (рис.4.15г).