

7.4. Прямой корневой метод синтеза сау
по координатам пространства состояний
Пусть характеристическое уравнение, системы имеет вид
![]() (7.19)
(7.19)
Каждый коэффициент ai (i=1, …, n) является функцией от некоторых параметров объекта управления и параметров корректирующих цепей, т.е.
![]() ,
(7.20)
,
(7.20)
где q=[q1, q2, …]T - искомый параметрический корректирующий вектор.
Для решения задачи модального синтеза введем желаемый характеристический многочлен
![]()
После раскрытия скобок получим
![]() (7.21)
(7.21)
где λ*i - желаемые значения корней характеристического многочлена, лежащие в заданных пределах:
![]() (7.22)
(7.22)
Приравнивая соответствующие коэффициенты (7.20) и (7.22), получим
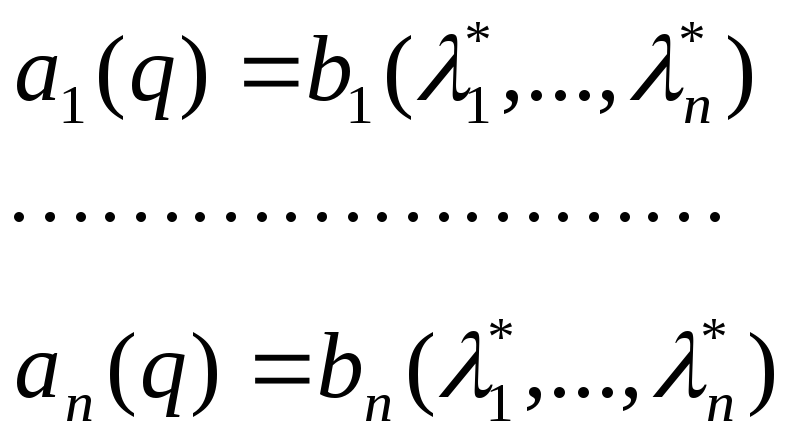 (7.23)
(7.23)
Здесь имеем n уравнений с n неизвестными, решая которые непосредственно или численными интерационными методами, можно определить все n численных значении параметров корректирующего вектора q=[q1, q2, …]T.
Очевидно, что полная коррекция, т.е. независимое назначение всех коэффициентов характеристического уравнения ai (i=1, …, n) возможно только при числе корректирующих параметров не меньше n. Это обстоятельство дает возможность предписанного назначения желаемых корней λ*i (i=1, …, n).
Пример.
Для следящей системы, рассмотренной в 8.1, собственная скорректированная параметрическая матрица имеет вид
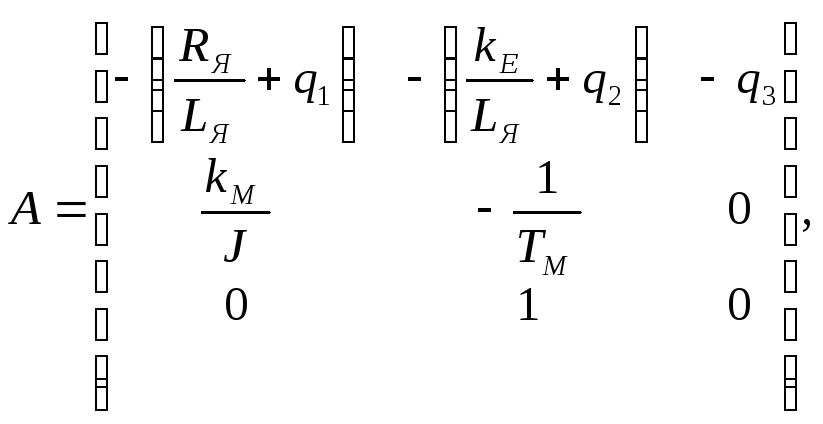
где
 .
.
Характеристическое уравнение системы будет
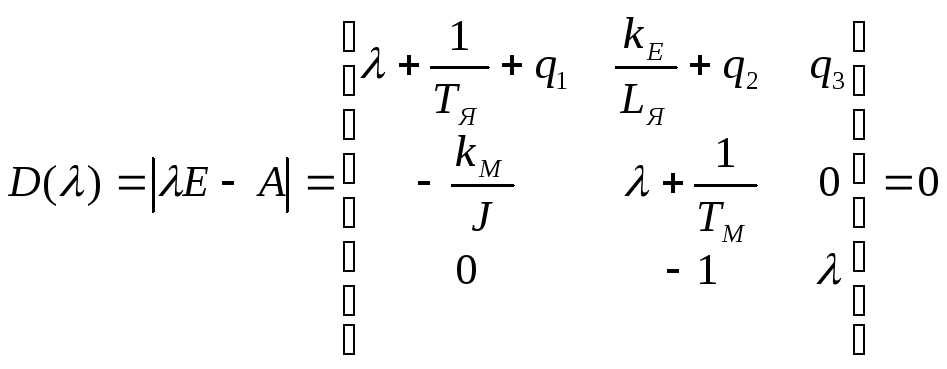 .
.
После раскрытия определителя получим
+a1λ2+a2λ+a3=0,
где
![]() .
.
Задаемся спектром матрицы А:
![]() .
.
После подстановки этих значении в уравнение
![]() ,
,
получим желаемое характеристическое уравнение
![]()
где
![]() .
.
В результате приравнивания коэффициентов характеристических уравнений проектируемой и желаемой систем будем иметь следующие функции реализации:
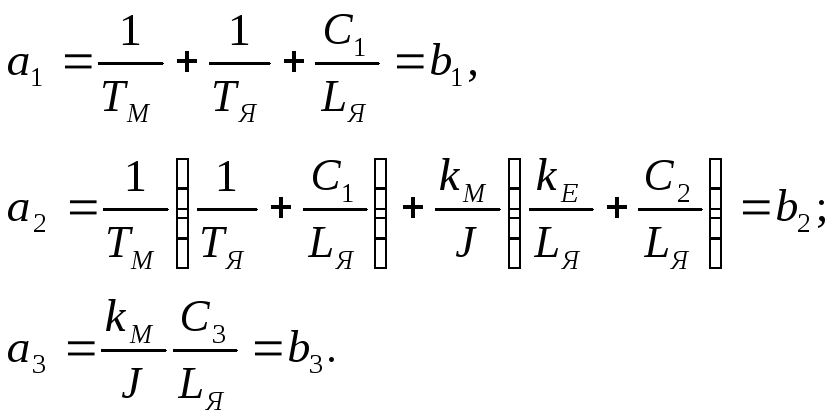
Отсюда следует возможность непосредственного решения задачи модального синтеза в виде

где C1, C2, C3 - определяемые при синтезе коэффициенты передачи от измеряемых координат пространства состояний системы, т.е. от тока в цепи якоря, от скорости вращения, от угла поворота исполнительного двигателя до входного напряжения цепи якоря.
7.5. Прямой метод синтеза корректирующей обратной
связи следящей системы
Пусть задана структурная схема следящей системы (рис. 8.8) и желаемое расположение корней характеристического уравнения замкнутой системы (рис. 7.9).
Передаточные функции неизменной части системы имеют вид
![]() .
.
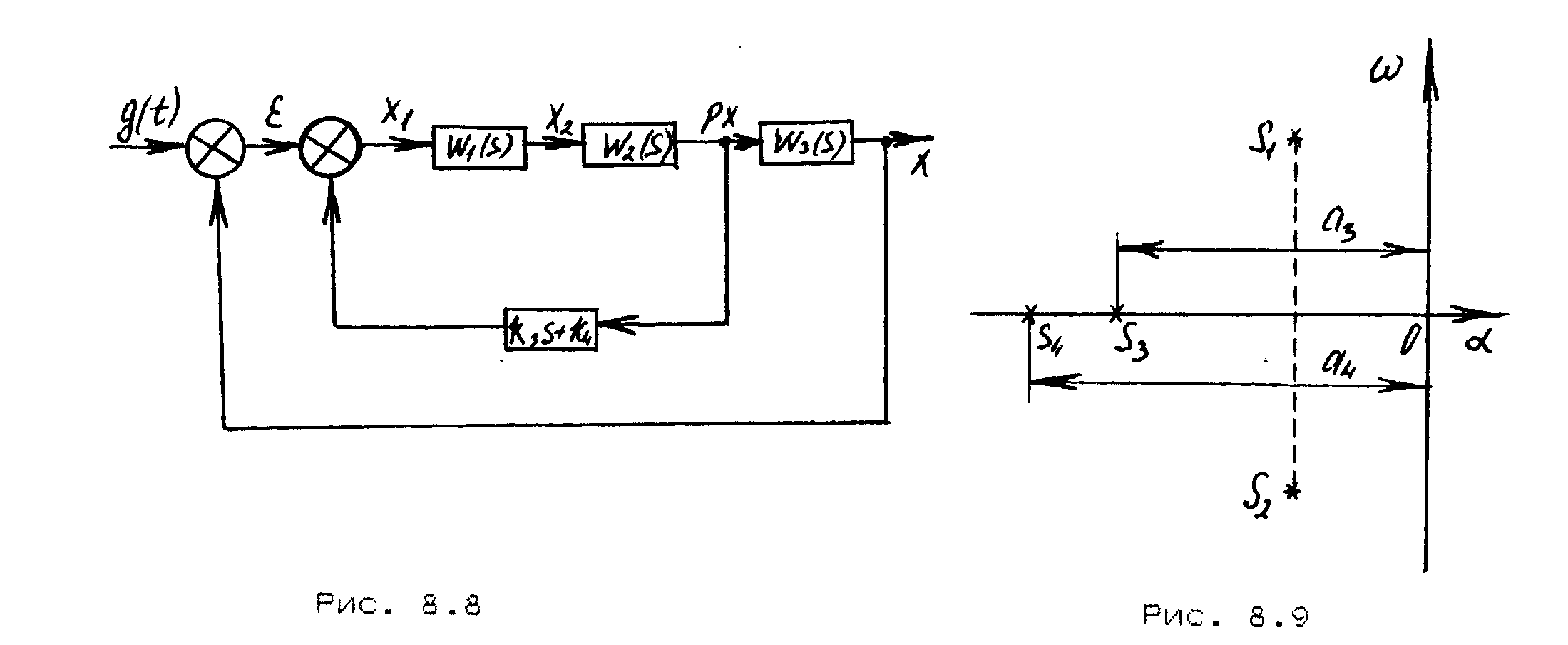
Требуется найти значения коэффициентов k3 и k4 дополнительной обратной связи, приводящие к желаемому расположению корней (рис.3.9), и коэффициент усиления прямой цепи системы k= k1 k2.
Согласно схеме имеем
![]()
Следовательно

Отсюда характеристическое уравнение замкнутой системы имеет вид
 (7.24)
(7.24)
Желаемому расположению корней соответствует следующее уравнение с заданными коэффициентами:
![]()
или
![]()
Приравнивая коэффициенты этого уравнения и уравнения 8.24, получаем соотношение
 (7.25)
(7.25)
и значения искомых коэффициентов
![]()
![]()
![]()
Условие (7.25) накладывает одну связь на произвольный выбор расположения корней – условие физической реализуемости в данной системе.
8. Системы автоматического управления
при случайных воздействиях