

7. Методы синтеза, основанные на теории
ПРОСТРАНСТВА СОСТОЯНИЙ
ЛЕКЦИЯ 20
План лекции:
1. Рассказать о составлении уравнений САУ в пространстве состояний.
2. Рассмотреть пример.
3. Рекомендуемая литература [4, 6].
7.1. Уравнения системы в пространстве состояний
При исследовании динамических свойств САУ классическими методами после составления дифференциальных уравнений для отдельных элементов системы обычно переходят к передаточным функциям. Далее составляют общую структурную схему САУ, в которой отдельные элементы представляются блоками с соответствующими передаточными функциями. Затем определяют передаточную функцию замкнутой системы, характеризующую связь между изображениями по Лапласу входной и выходной величины САУ.
Поведение системы во времени можно характеризовать не только выходной величиной САУ, но и промежуточными переменными в цепи системы, число которых равно порядку системы n. Таким образом, получается n-мерный вектор состояния, множество возможных положений которого образует векторное пространство, называемое пространством состояний системы.
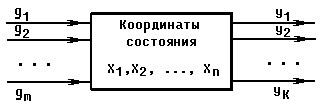
Рис. 7.1
Будем рассматривать общий случай обыкновенных линейных САУ
(рис. 7.1), описываемых системой дифференциальных уравнений в нормальной форме в векторно-матричной записи
![]() ;
(7.1)
;
(7.1)
Y = CX ,
где X - вектор состояния системы, Y - вектор выходных величин, G - вектор внешних воздействии (задающих и возмущающих), т.е:
Через А, В, С обозначены:
 - собственная параметрическая
матрица САУ;
- собственная параметрическая
матрица САУ;
 - входная матрица САУ;
- входная матрица САУ;
 - выходная матрица САУ.
- выходная матрица САУ.
Процессы в системе при свободном движении (без внешних воздействий) согласно (7.1) описываются векторно-матричным уравнением вида
![]() ,
(7.2)
,
(7.2)
которое имеет следующее характеристическое уравнение:
![]() . (7.3)
. (7.3)
В развернутой форме векторное уравнение (7.2) записывается следующей системой дифференциальных уравнений:
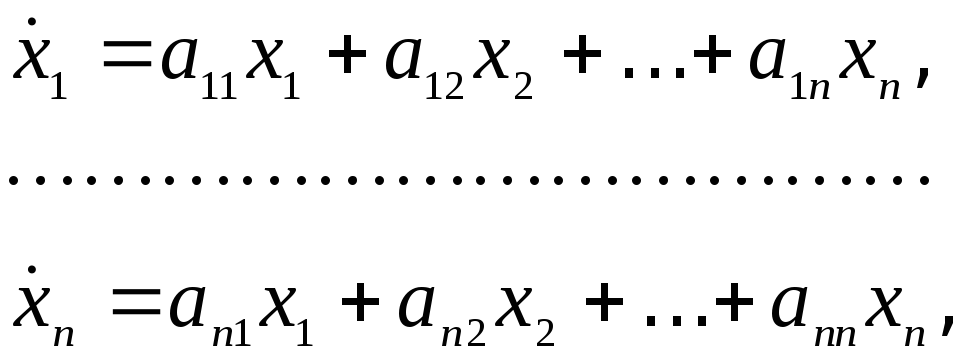 (7.4)
(7.4)
Характеристическое уравнение (7.3) в развернутой форме имеет вид
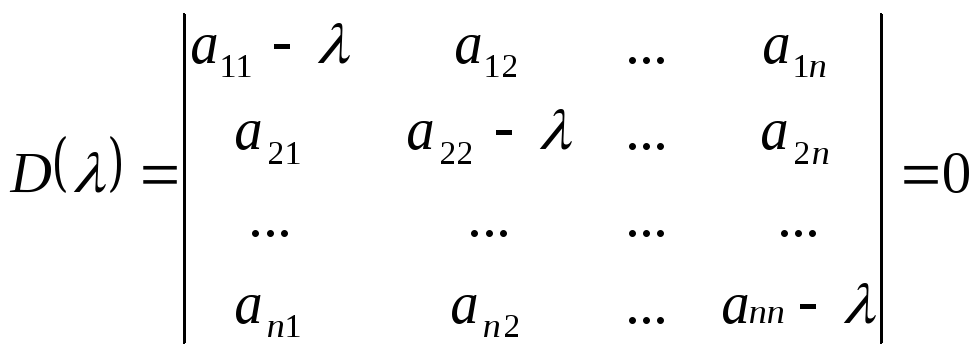 .
(7.5)
.
(7.5)
В качестве примера рассмотрим вывод уравнений состояния электромеханической следящей системы, принципиальная схема которой приведена на рис. 7.2.

Рис. 7.2
В этой системе введены обратные связи по углу поворота, скорости вращения и току в цепи якоря двигателя. Обозначение переменных ясны из чертежа.
Для электродвигателя постоянного тока имеем:
1) уравнение электрической цепи
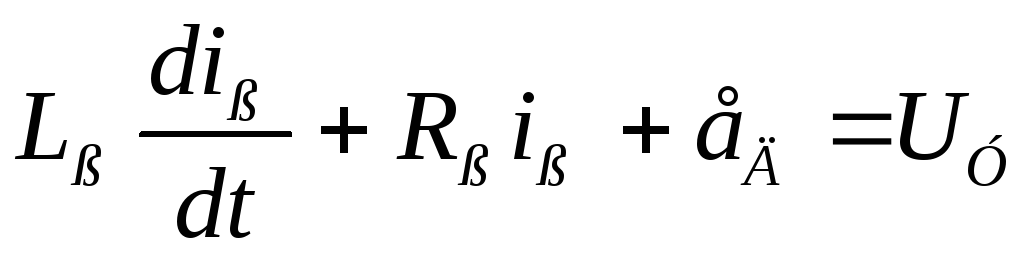 ;
(7.6)
;
(7.6)
2) уравнение механической цепи
![]() ,
(7.7)
,
(7.7)
где МС=γΩ - момент сопротивления ; МД=kМ iЯ - момент двигателя; еД=kE Ω – противо-э.д.с двигателя .
Через γ, kМ, kE обозначены соответствующие коэффициенты.
Преобразуя выражения (7.6) и (7.7), получим уравнения двигателя в виде
![]() ;
(7.8)
;
(7.8)
 .
(7.9)
.
(7.9)
Для входной цепи усилителя напряжения имеем
![]() ,
,
где
![]() о
, Ωо
– внешние входные воздействия (угол и
угловая скорость поворота задающего
вала);
о
, Ωо
– внешние входные воздействия (угол и
угловая скорость поворота задающего
вала);
![]() , Ω –
выходные величины системы (угол
и угловая скорость поворота выходного
вала).
, Ω –
выходные величины системы (угол
и угловая скорость поворота выходного
вала).
Для входной цепи усилителя мощности запишем
U2 = K1U1 - KocUoc,
где Uoc=Rш iЯ .
Выходное напряжение усилителя мощности УМ, с учетом предыдущего выражения, будет равно
Uу = KумU2=КумК1U1 - KумKосRшiЯ.
После подстановки получим
Uу =
KумK1[КП(![]() о
-
о
-
![]() )+КТ(Ωо-Ω)]-KумKосRшiЯ.
(7.10)
)+КТ(Ωо-Ω)]-KумKосRшiЯ.
(7.10)
Совместно (7.8) и (7.10) дают уравнение
![]() которое
может быть представлено в виде
которое
может быть представлено в виде
![]() .(7.11)
.(7.11)
Скорость вращения
![]() .
(7.12)
.
(7.12)
Систему из трех уравнений (7.11), (7.9) и (7.12) запишем в векторно-матричной форме:
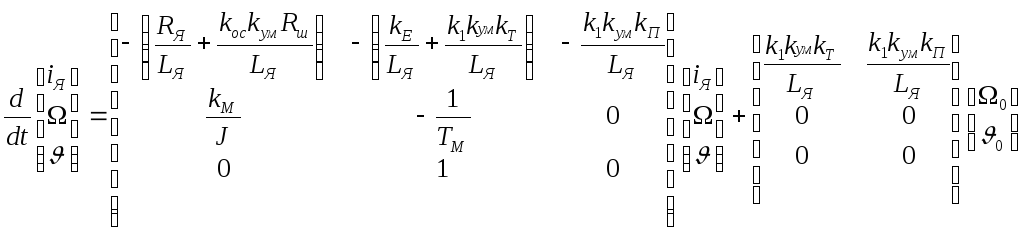 .
.
Введем обозначения iЯ=x1;
Ω=x2;
![]() =x3
– координаты вектора состояний
следящей системы. Обозначим также :
=x3
– координаты вектора состояний
следящей системы. Обозначим также :
![]()
![]()
![]()
В результате получим уравнение состояний следящей системы в стандартной векторно-матричной форме
![]() , (7.13)
, (7.13)
где X – вектор состояний системы, G – входной вектор, причем
Параметрическая матрица состояния системы А и входная матрица В имеют вид:
Соответствующая структурная схема cистемы представлена на рис. 7.3.
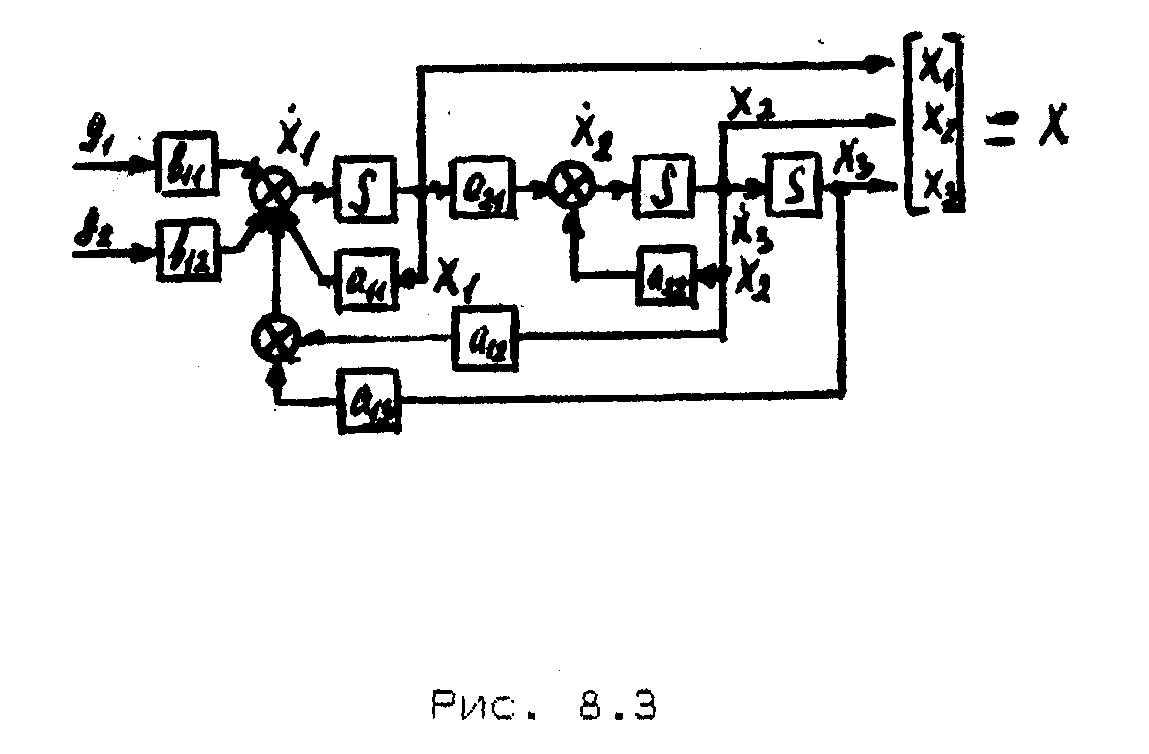
Рис. 7.3
Она составлена по уравнениям вида
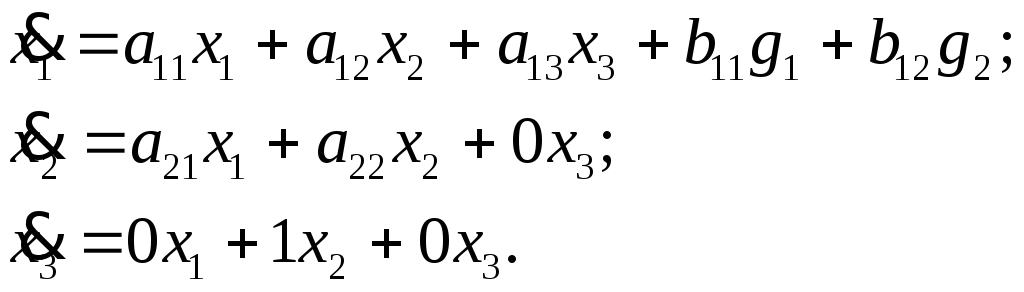
Дополним уравнение (7.13) уравнением выхода.
Y=CX.
Поскольку в наших
обозначениях выходные величины Ω=x2,
![]() =x3,
то в этом уравнении координатами
выходного вектора системы
=x3,
то в этом уравнении координатами
выходного вектора системы
будут величины y1=0,
y2=x2=
Ω, y3=x3=![]() ,
поэтому выходная матрица системы
будет иметь вид
,
поэтому выходная матрица системы
будет иметь вид
 .
.
Таким образом, при введении в систему корректирующих фильтров за счет дополнения основных уравнений системы уравнениями цепей коррекции, пространство состояний корректируемой системы расширяется. Порядок системы увеличивается, однако число свободно подбираемых параметров увеличивается еще больше.
В качестве примера составим уравнения состояния интегро-дифференцирующего корректирующего звена (рис. 7.4 и 7.5).
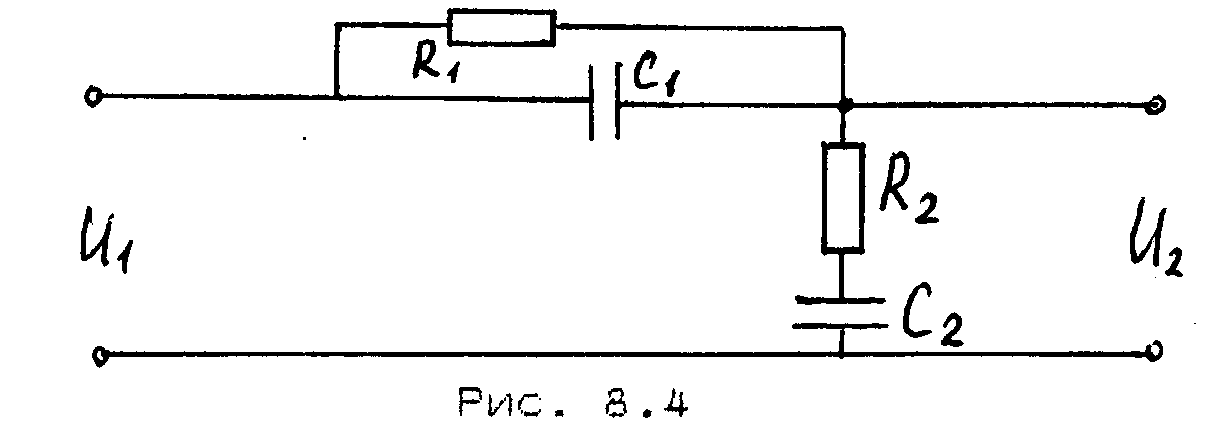
Рис. 7.4
В качестве координат состояния целесообразно выбрать напряжения на конденсаторах, характеризующие накопление количества электричества. Получим
![]()
Но, так как
![]()
то после подстановки и простых преобразовании будем иметь следующие уравнения состояния:
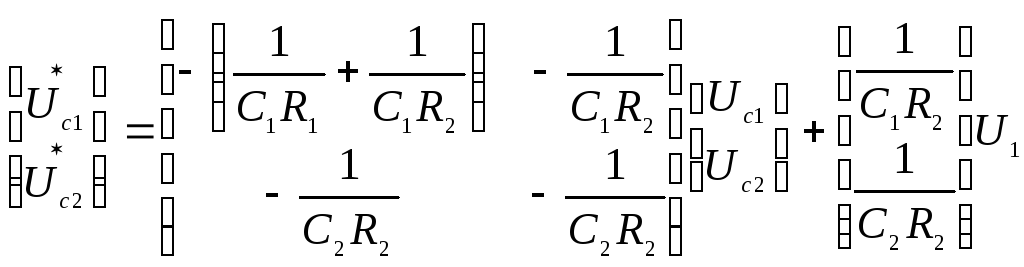 .
.
Структурная схема в пространстве состояний, составленная по уравнениям данного корректирующего звена, приведена на рис. 7.5
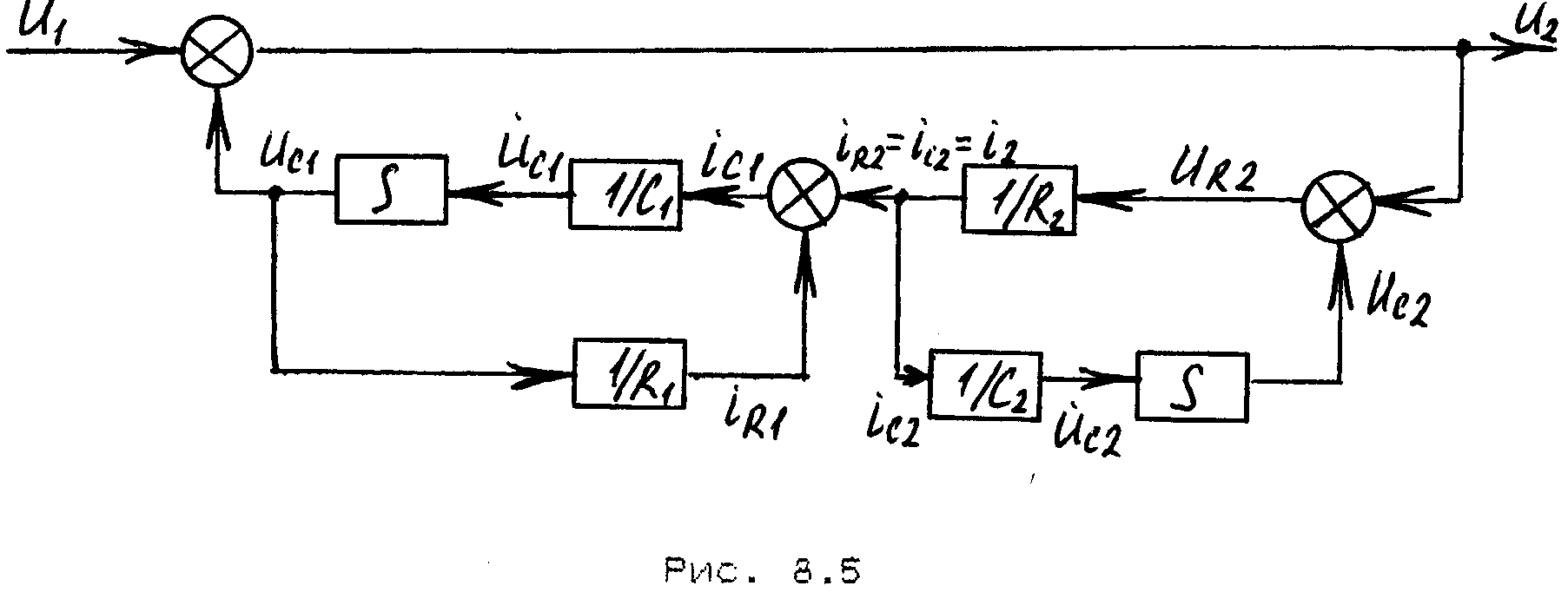
Рис. 7.5
Выходная величина U2=U1-UC1.
Включение последовательно подобранного корректирующего звена расширяет пространство состояний на две координаты, однако число свободных варьируемых параметров С1, С2, R1, R2 равно четырем.
ЛЕКЦИЯ 21
План лекции:
1. Коррекция системы в пространстве состояния.
2. Корневой метод синтеза САУ по координатам пространства состоянии.
3. Прямой метод синтеза корректирующей обратной связи следящей
системы.
4. Рекомендуемая литература [4].