

7.2. Коррекция системы в пространстве состояний
При расчете систем управления в пространстве состояний надо иметь в виду, что не все координаты состояния могут быть технически измеряемыми. Это часто является или чрезвычайно затруднительным, или технически невозможным.
Пусть А0 обозначает матрицу нескорректированного объекта управления. Положим, что r координат вектора x0 технически измеряемы, a h координат - неизмеряемы. Для коррекции системы так называемым методом "расширения пространства состояний" введем блочную, окаймленную рядами нулей, матрицу
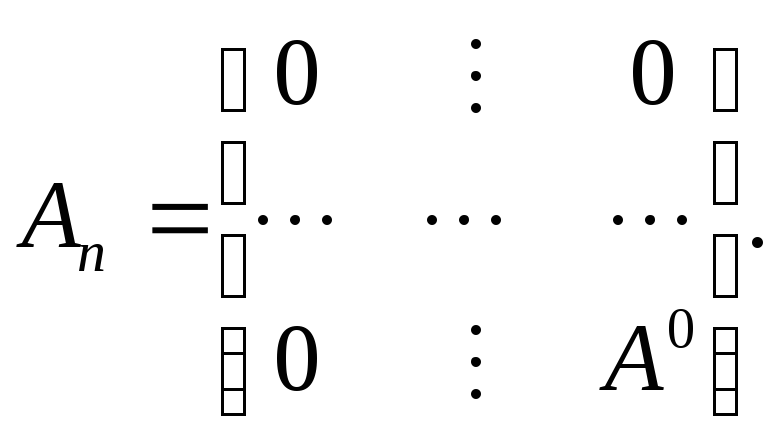 (7.14)
(7.14)
Теперь уравнение объекта управления в векторно-матричной форме будет
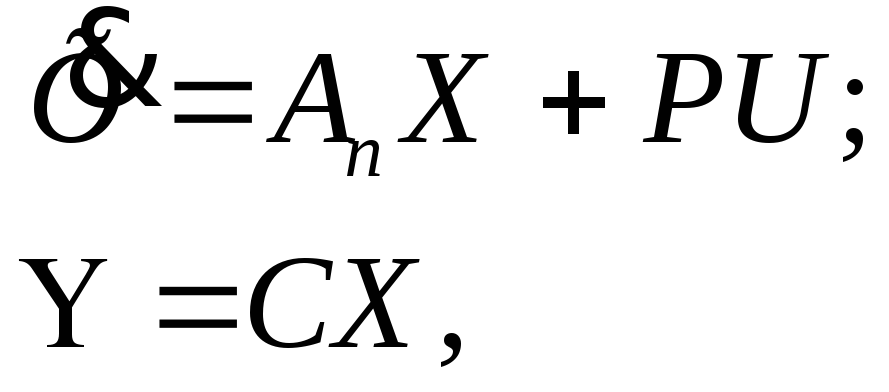
где U и Y - векторы соответственно управления и выхода, Р и С - матрицы соответствующих порядков.
Закон управления запишем в виде
![]() ,
,
где Fμ и Fν - матрицы, которые являются функциями параметров последовательных корректирующих устройств (корректирующих фильтров) μ={μ1, …, μn-τ} и параметров отрицательных обратных связей ν={ν1, …, νγ}, H – входная матрица управления.
Для замкнутой системы получим
![]() ,
,
или
![]() ,
,
где
![]()
т.е. последовательная коррекция определяется матрицей Aμ=PFμC, заполняющей нулевые места блочной матрицы (7.14), т.е.
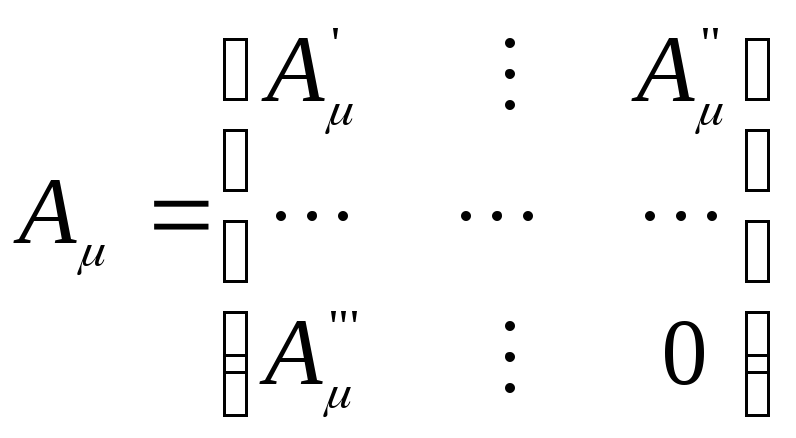 .
.
Корректирующее влияние обратных связей несет в себе матрица Aν=PFνC, входящая в основную часть блочной матрицы (7.14), т.е.
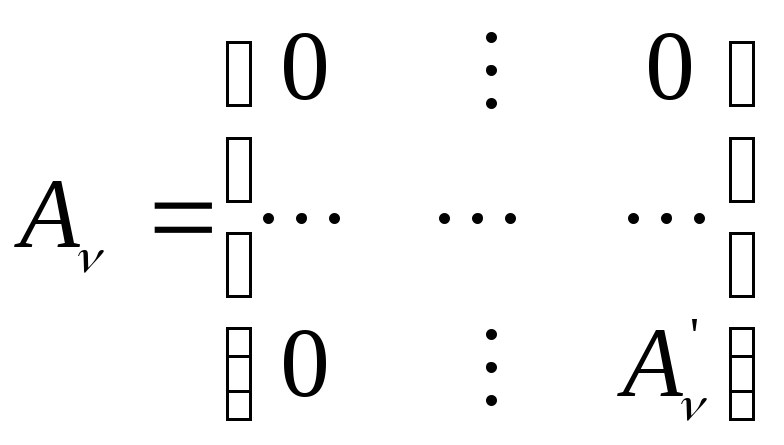 .
.
Свободное движение скорректированной системы описывается векторно-матричным уравнением вида
![]() ,
,
которому соответствует характеристическое уравнение
![]() .
.
В развернутом форме характеристическое уравнение имеет вид
![]() ,
,
где коэффициенты есть функции от параметров объекта и параметров корректирующих цепей:
![]() .
.
7.3. Прямой корневой метод синтеза
доминантного типа
О качестве процесса управления можно судить по расположению корней характеристического уравнения (т.е. полюсов передаточной функции замкнутой системы), учитывая также еще и операторный многочлен в правой части дифференциального уравнения (т.е. нули передаточной функции замкнутой системы).
В настоящее время разрабатываются различные корневые методы расчета, автоматических систем. Наиболее перспективным из корневых методов сейчас является прямой корневой метод синтеза, называемый модальным методом синтеза системы по заданному качеству процесса управления.
Заданное качество системы будем определять желаемым расположением нулей и полюсов ее передаточной функции. Пусть задана передаточная функция замкнутой системы
![]() (7.15)
(7.15)
где К - общий коэффициент усиления, N(s) и L(s) - многочлены, имеющие единичные коэффициенты при младших членах.
Передаточная функция замкнутой системы для управляемой величины по задающему воздействию g(t) имеет вид
![]() (7.16)
(7.16)
или
![]() . (7.17)
. (7.17)
Задача синтеза состоит в том, чтобы, опираясь на ряд качественных показателей системы, найти соответствующее расположение величин λ1, λ2, … , λn на комплексной плоскости, а затем найти параметры корректирующих цепей, обеспечивающих заданное расположение указанных корней. При этом исходными качественными показателями могут быть, например, вид переходного процесса (апериодический, колебательный), время затухания, колебательность, частота колебании, интегральная квадратичная ошибка и т.д.
Указанные требования на одновременное выполнение различных качественных показателей создаваемой системы приводят к задаче выделения на комплексной плоскости соответствующих областей допустимого расположения полюсов и нулей передаточной функции замкнутой системы.