

-
Суждение об устойчивости системы
ПО ЕЕ ЛИНЕЙНОЙ МОДЕЛИ
Рассмотренные выше критерии позволяют исследовать устойчивость САУ "в малом", так как они связаны с линейными уравнениями, полученными путем линеаризации исходных нелинейных уравнений. При этом линеаризация проводилась в предположении, что переменные, характеризующие систему, имеют малые приращения.
С помощью указанных критериев мы не можем судить об устойчивости системы "в большом" или о "неограниченной устойчивости".
Рассмотрим один из методов, который позволяет судить об устойчивости систем "в большом". Положим для простоты, что уравнение возмущенного движения исследуемой системы содержит всего одну однозначную нелинейную функцию
![]() .
(4.41)
.
(4.41)
Производя линеаризацию функции f(xk), ее можно заменить линейной функцией
f(xk)cxk, (4.42)
где c – постоянный коэффициент.
C учетом (4.42) уравнение (4.41) принимает вид
![]() .
(4.43)
.
(4.43)
Методом Д–разбиения можно определить диапазон изменения с*<c<c**, соответствующий устойчивому состоянию системы (с* и с** соответствуют границе устойчивости линейной модели).
Выберет такие значения cо, c1, c2, чтобы выполнялось следующее неравенство:
c*<c1<cо<c2<c**, (4.44)
где cо – численное значение коэффициента c, полученное в результате линеаризации функции f(xk).
В плоскости нелинейной функции f(xk) построим исходную нелинейную функцию и два луча c1xk и c2xk т.е.
В результате такого построения могут встретиться три случая, показанные на рис.4.16.
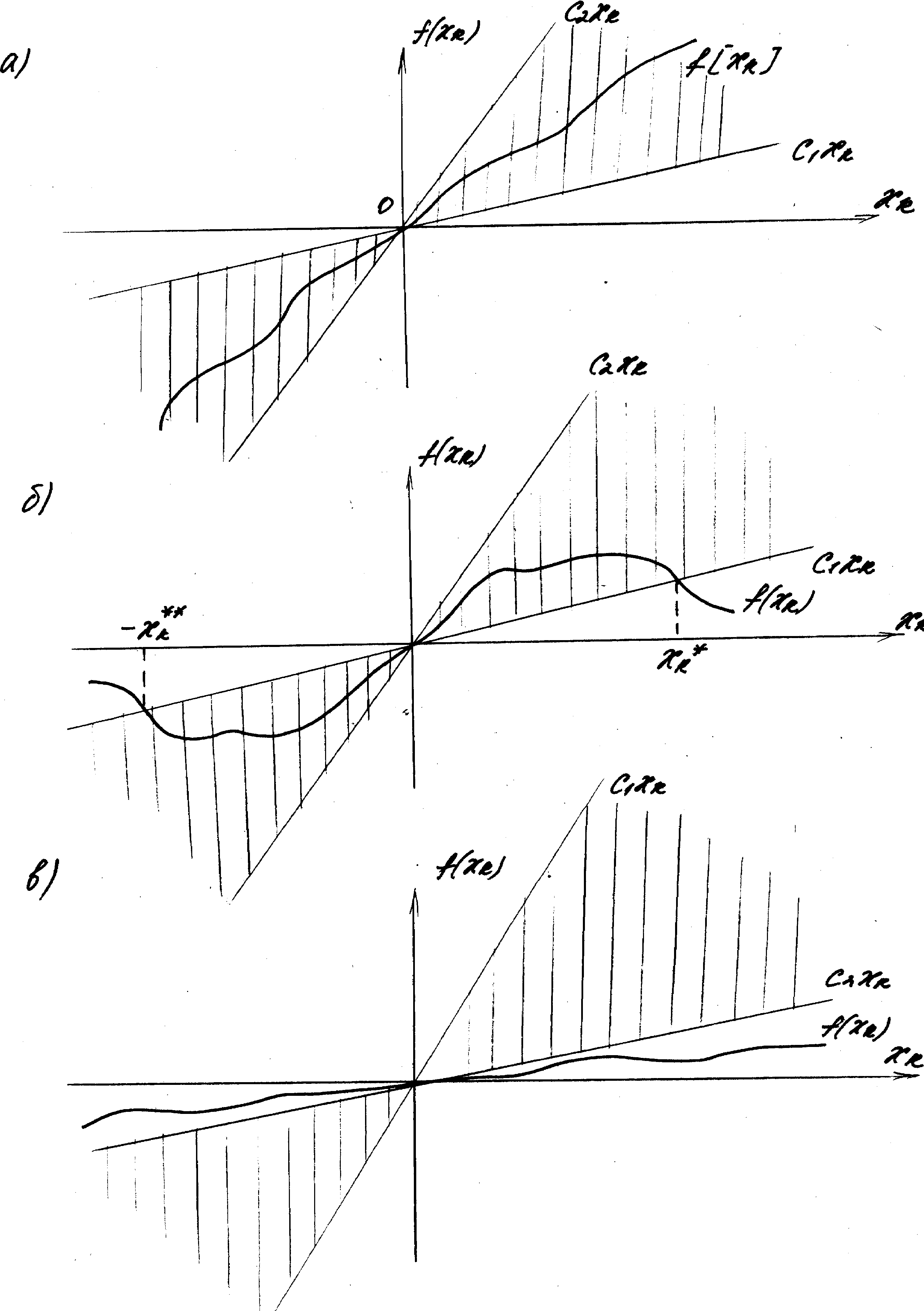
Рис. 4.16
Для них можно сделать следующие выводы об устойчивости исходной нелинейной системы по ее линейной модели:
-
Если нелинейная функция f(xk) заключена между лучами c1xk и c2xk во всем диапазоне изменения xk (рис.4.16а), то исходная нелинейная система неограниченно устойчива.
-
Если нелинейная функция f(xk) заключена между лучами c1xk и c2xk лишь в окрестности начала координат при –xk*<xk<xk** (рис.4.16б), то нелинейная система устойчива "в малом".
Если реальные отклонения переменной xk не превышают xk*, то можно считать, что исходная нелинейная система устойчива "в большом".
-
Если нелинейная функция f(xk) не заключена между лучами c1xk и c2xk даже в окрестности начала координат, то по линейной модели нельзя установить устойчивость исходной нелинейной системы даже “в малом”.
Рассмотренный метод может быть применен также в том случае, когда нелинейная функция зависит от нескольких переменных, а система содержит переменные параметре. Применение метода возможно лишь для системы, уравнения которой (4.41) содержат линеаризуемые функции.
5. Качество сау
Лекция 13
План лекции:
1. Рассказать об основных показателях качества САУ.
2. Методы построения переходных характеристик.
3. Рекомендуемая литература [1, 2, 4, 7].
5.1. Основные показатели качества
Устойчивость является необходимым, но не достаточным условием нормальной работы САУ. В устойчивой системе могут возникать собственные колебания с недопустимо большой амплитудой и временем затухания. О качестве регулирования судят по поведению систем в переходном режиме, т.е. при переходе САУ из одного установившегося состояния в другое.
Показатели качества чаще всего определяются по виду переходной характеристики, т.е. по графику переходного процесса, построенному при единичном ступенчатом воздействии на систему :
![]() .
.
В следящих системах иногда задают воздействия, изменяющиеся во времени с постоянной скоростью или постоянным ускорением.
К основным показателям качества относят время переходного процесса tПП , перерегулирование σ%, максимальное отклонение регулируемой величины хm , установившееся значение регулируемой величины ху или статическую ошибку, полосу пропускания ωп и др.
1. Время переходного процесса tПП характеризует быстродействие системы и определяется как интервал времени от начала переходного процесса до момента, когда отклонение выходной величины от ее нового установившегося значения становятся меньше определенной достаточно малой величины. Обычно в качестве последней берут 5% максимального отклонения в переходный период (рис. 5.1 в).
2. Максимальное отклонение в переходный период. В случае переходного процесса, вызванного возмущением, максимальное отклонение определяется величиной хm , приходящейся на единицу возмущения f = 1(t). В случае переходных процессов, вызванных изменением задающего воздействия, максимальное отклонение определяется относительно нового установившегося значения ху и равно в процентах
![]()
Заметим, что эта величина аналогична предыдущей, поскольку здесь ху пропорционально задающему воздействию. Величина σ часто называется перерегулированием.
3. Колебательность переходного процесса оценивают отношением соседних максимумов хm1/ хm2 в процентах.
![]()
![]()
Незатухающие колебания имеют колебательность 100%. Колебательность стремится к нулю при уменьшении до нуля второго максимума переходной характеристики, когда получается неколебательный процесс.
Иногда колебательность определяется числом колебаний, равным числу минимумов кривой переходного процесса в интервале времени.
Приемлемым числом колебаний в САУ считается 1–2, иногда допускается 3 и более колебаний.
-
Установившееся значение регулируемой величины ху зависит от астатизма САУ. В астатических системах установившаяся ошибка равна нулю и установившееся значение регулируемой величины будет равно её заданному значению, т.е. управляющей величине. В статических системах установившееся значение регулируемой величины будет отличаться от её заданного значения на величину установившейся ошибки.
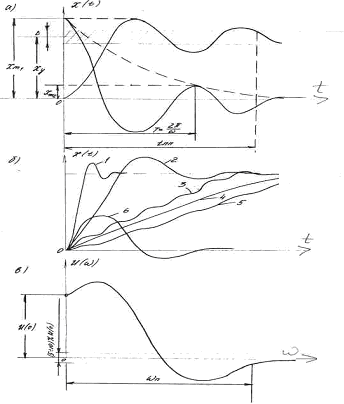
Рис. 5.1
Установившаяся ошибка в статической системе хст зависит от величины входного воздействия f0 и от коэффициента передачи системы k.
Для задающего воздействия
![]()
Для возмущающего воздействия
![]()
где ko6 – коэффициент передачи объекта регулирования; kр – коэффициент передачи регулятора.
Относительная величина установившейся ошибки называется коэффициентом статизма системы и определяется по формуле
![]() .
.
Коэффициент статизма системы относительно задающего воздействия определяется выражением
![]()
а относительно возмущающего воздействия имеет вид
![]()
5.
Показателем качества может служить
также характер
переходного процесса
(монотонный или колебательный).
Переходный процесс считается
монотонным,
если производная от регулируемой
величины по времени
![]() не меняет
знак. На рис. 5.1б
показаны примеры колебательных
(1, 2, 3, 6) и монотонных
(4, 5) переходных процессов.
не меняет
знак. На рис. 5.1б
показаны примеры колебательных
(1, 2, 3, 6) и монотонных
(4, 5) переходных процессов.
Полоса пропускания системы ωП определяется диапазоном частот внешних воздействий, проходящих через систему с той или иной степенью искажения. Полосу пропускания определяют по частотным характеристикам, например, по вещественной характеристике системы (рис. 5.1в).