

Week 6: Vector Torque and Angular Momentum |
299 |
This is why I at least tried to be careful to assert throughout week 5) that the mass distributions for the one dimensional rotations we considered were su ciently symmetric. “Su ciently”, as you should now be able to see and understand, means mirror symmetric across the axis of rotation (best, zero external force or torque required to maintain rotation)) or plane of rotation (su cient, but need external force to maintain motion of the center of mass in a circle). Only in these two cases is the
~ ~
total angular momentum L is parallel to ω~ such that L = Iω~ for a suitable scalar I.
Example 6.6.1: Rotating Your Tires
tire |
mass excess |
mass excess |
|
ω |
|
bearings |
|
bearing wear |
bearing wear |
axle |
|
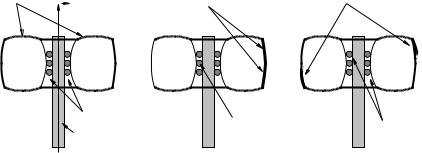
Figure 90: Three tires viewed in cross section. The first one is perfectly symmetric and balanced. The second one has a static imbalance – one side is literally more massive than the other. It will stress the bearings as it rotates as the bearings have to exert a di erential centripetal force on the more massive side. The third is dynamically imbalanced – it has a non-planar mass assymetry and the bearings will have to exert a constantly precessing torque on the tire. Both of the latter situations will make the drive train noisy, the car more di cult and dangerous to drive, and will wear your bearings and tires out much faster.
This is why you should regularly rotate your tires and keep them well-balanced. A “perfect tire” is one that is precisely cylindrically symmetric. If we view it from the side it has a uniform mass distribution that has both mirror symmetry across the axis of rotation and mirror symmetry across the plane of rotation. If we mount such a tire on a frictionless bearing, no particular side will be heavier than any other and therefore be more likely to rotate down towards the ground. If we spin it on a frictionless axis, it will spin perfectly symmetrically as the bearings will not have to exert any precessing torque or time-varying force on it of the sort exerted by the massless rod in figure 88.
For a variety of reasons – uneven wear, manufacturing variations, accidents of the road – tires (and the hubs they are mounted on) rarely stay in such a perfect state for the lifetime of either tire or car. Two particular kinds of imbalance can occur. In figure 90 three tires are viewed in crosssection. The first is our mythical brand new perfect tire, one that is both statically and dynamically balanced.
The second is a tire that is statically imbalanced – it has mirror symmetry across the plane of rotation but not across the axis of rotation. One side has thicker tread than the other (and would tend to rotate down if the tire were elevated and allowed to spin freely). When a statically imbalanced tire rotates while driving, the center of mass of the tire moves in a circle around the axle and the bearings on the opposite side from the increased mass are anomalously compressed in order to provide the required centripetal force. The car bearings will wear faster than they should, and the car will have an annoying vibration and make a wubba-wubba noise as you drive (the latter can occur for many reasons but this is one of them).
The third is a tire that is dynamically imbalanced. The surplus masses shown are balanced well enough from left to right – neither side would roll down as in static imbalance, but the mass