

Week 4: Systems of Particles, Momentum and Collisions |
|
185 |
||||
or |
|
~ |
|
|||
|
m1~v1,i + m2~v2,i |
|
|
|||
~vf = ~vcm = |
= |
|
P tot |
|
||
m1 + m2 |
Mtot |
|||||
|
|
|||||
The final velocity of the stuck together masses is the (constant) velocity of the center of mass of the system, which makes complete sense.
Kinetic energy is always lost in an inelastic collision, and one can always evaluate it from:
K = Kf − Ki = 2Mtot |
− |
à |
2m1 |
+ 2m2 |
! |
||
|
Ptot2 |
|
|
p12,i |
|
p22,i |
|
In a partially inelastic collision, the particles collide but don’t quite stick together. One has three (momentum) conservation equations and needs six final velocities, so one in general must be given three pieces of information in order to solve one in three dimensions. Even in one dimension one has only one equation and two unknowns and need at least one additional piece of independent information to solve a problem.
•The Kinetic Energy of a System of Particles can in general be written as:
Ã!
|
X |
Ktot = |
Ki′ + Kcm = Ktot′ + Kcm |
|
i |
which one should read as “The total kinetic energy of the system is the total kinetic energy in the (primed) center of mass frame plus the kinetic energy of the center of mass frame.”
The latter is just:
1 |
2 |
P 2 |
|
|
|
tot |
|
Kcm = |
|
Mtotvcm = |
|
|
2Mtot |
||
2 |
|
||
This theorem will prove very useful to us when we consider rotation, but it also means that the total kinetic energy of a macroscopic object many of many microscopic parts is the sum of its macroscopic kinetic energy – its kinetic energy where we treat it as a “particle” located at its center of mass – and its internal microscopic kinetic energy. The latter is essentially related to heat and temperature. Inelastic collisions that “lose kinetic energy” of their macroscopic constituents (e.g. cars) gain it in the increase in temperature of the objects after the collision that results from the greater microscopic kinetic energy of the particles that make them up in the center of mass (object) frame.
4.1: Systems of Particles
The world of one particle is fairly simple. Something pushes on the particle, and it accelerates. Stop pushing, it coasts or remains still. Do work on it and it speeds up. Do negative work on it and it slows down. Increase or decrease its potential energy; decrease or increase its kinetic energy.
However, the real world is not so simple. For one thing, every push works two ways – all forces act symmetrically between objects – no object experiences a force all by itself. For another, real objects are not particles – they are made up of lots of “particles” themselves. Finally, even if we ignore the internal constituents of an object, we seem to inhabit a universe with lots of objects.
Somehow we know intuitively that the details of the motion of every electron in a baseball are irrelevant to the behavior of the baseball as a whole. Clearly, we need to deduce ways of taking a collection of particles and determining its collective behavior. Ideally, this process should be one we can iterate, so that we can treat collections of collections – a box of baseballs, under the right circumstances (falling out of an airplane, for example) might also be expected to behave within reason like a single object independent of the motion of the baseballs inside, or the motion of the atoms in the baseballs, or the motion of the electrons in the atoms.
186 |
Week 4: Systems of Particles, Momentum and Collisions |
Baseball ("particle" of mass M)
Packing (particle of mass m < M)
Atoms in packing
electrons in atom
Figure 45: An object such as a baseball is not really a particle. It is made of many, many particles
– even the atoms it is made of are made of many particles each. Yet it behaves like a particle as far as Newton’s Laws are concerned. Now we find out why.
We will obtain this collective behavior by averaging, or summing over at successively larger scales, the physics that we know applies at the smallest scale to things that really are particles and discover to our surprise that it applies equally well to collections of those particles, subject to a few new definitions and rules.
4.1.1: Newton’s Laws for a System of Particles – Center of Mass
F1 |
|
F2 |
m1 |
Ftot |
m2 |
x1 |
x2 |
M |
|
|
|
|
tot |
|
Xcm |
m |
3 |
|
|
|
|
|
x3 |
|
F |
|
|
|
3 |
~
Figure 46: A system of N = 3 particles is shown above, with various forces F i acting on the masses (which therefore each their own accelerations ~ai). From this, we construct a weighted average acceleration of the system, in such a way that Newton’s Second Law is satisfied for the total mass.
Suppose we have a system of N particles, each of which is experiencing a force. Some (part) of those forces are “external” – they come from outside of the system. Some (part) of them may be “internal” – equal and opposite force pairs between particles that help hold the system together (solid) or allow its component parts to interact (liquid or gas).
We would like the total force to act on the total mass of this system as if it were a “particle”. That is, we would like for:
~ |
~ |
(341) |
F tot = MtotA |
||
where vA is the “acceleration of the system”. This is easily accomplished.
Week 4: Systems of Particles, Momentum and Collisions
Newton’s Second Law for a system of particles is written as:
~ |
X |
~ |
X |
d2~xi |
F tot = |
|
F i = |
mi |
|
i |
dt2 |
|||
|
|
i |
|
We now perform the following Algebra Magic:
~ |
= |
X |
~ |
|
|
|
|
F tot |
|
F i |
|
|
|
||
|
|
i |
|
d2~xi |
|
||
|
= |
X |
mi |
|
|||
|
|
|
|
|
|||
|
i |
dt2 |
|
|
|||
|
= |
mi |
! ddt2 |
||||
|
à |
||||||
|
|
|
|
|
2 |
~ |
|
|
|
X |
|
|
X |
||
i
187
(342)
(343)
(344)
(345)
2 ~ |
|
|
|
d X |
~ |
|
|
= Mtot |
dt2 |
= MtotA |
(346) |
~
Note well the introduction of a new coordinate, X. This introduction isn’t “algebra”, it is a definition. Let’s isolate it so that we can see it better:
|
2 |
~xi |
2 ~ |
|
|
X |
d |
d X |
|
||
|
|
|
|
|
|
mi |
|
= Mtot |
|
(347) |
|
dt2 |
dt2 |
||||
i |
|
|
|
|
|
~
Basically, if we define an X such that this relation is true then Newton’s second law is recovered
~
for the entire system of particles “located at X” as if that location were indeed a particle of mass Mtot itself.
We can rearrange this a bit as:
~ |
2 |
~ |
1 |
|
2 |
~xi |
1 |
|
d~vi |
||||
dV |
|
d |
X |
X |
d |
X |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
= |
|
= |
|
|
mi |
|
= |
|
mi |
|
||
dt |
dt2 |
Mtot |
i |
dt2 |
Mtot |
dt |
|||||||
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
and can integrate twice on both sides (as usual, but we only do the integrals formally). integral is:
~ |
|
1 |
|
|
~ |
1 |
|
d~xi ~ |
||||
dX ~ |
X |
X |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
= V = |
|
|
mi~vi + V 0 = |
|
mi |
|
+ V 0 |
|||
|
dt |
Mtot |
Mtot |
dt |
||||||||
|
|
|
|
|
|
i |
|
|
|
i |
|
|
and the second is: |
|
|
|
1 |
X |
|
|
|
|
|
||
|
|
|
~ |
~ |
~ |
|
|
|||||
|
|
|
X = |
Mtot |
mi~xi + V 0t + X0 |
|
|
|||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
(348)
The first
(349)
(350)
Note that this equation is exact, but we have had to introduce two constants of integration that are
~ ~
completely arbitrary: V 0 and X0.
These constants represent the exact same freedom that we have with our inertial frame of reference – we can put the origin of coordinates anywhere we like, and we will get the same equations of motion even if we put it somewhere and describe everything in a uniformly moving frame. We should have expected this sort of freedom in our definition of a coordinate that describes “the system” because we have precisely the same freedom in our choice of coordinate system in terms of which to describe it.
In many problems, however, we don’t want to use this freedom. Rather, we want the simplest description of the system itself, and push all of the freedom concerning constants of motion over to the coordinate choice itself (where it arguably “belongs”). We therefore select just one (the simplest one) of the infinity of possibly consistent rules represented in our definition above that would preserve Newton’s Second Law and call it by a special name: The Center of Mass!
188 |
Week 4: Systems of Particles, Momentum and Collisions |
We define the position of the center of mass to be:
|
~ |
|
X |
|
M Xcm = |
mi~xi |
(351) |
||
|
|
|
i |
|
or: |
1 |
|
|
|
~ |
X |
|
||
Xcm = |
|
mi~xi |
(352) |
|
M |
||||
|
|
|
i |
|
(with M = Pi mi). If we consider the “location” of the system of particles to be the center of mass, then Newton’s Second Law will be satisfied for the system as if it were a particle, and the location in question will be exactly what we intuitively expect: the “middle” of the (collective) object or system, weighted by its distribution of mass.
Not all systems we treat will appear to be made up of point particles. Most solid objects or fluids appear to be made up of a continuum of mass, a mass distribution. In this case we need to do the sum by means of integration, and our definition becomes:
M X~ cm = Z |
~xdm |
(353) |
||
or |
|
Z |
|
|
X~ cm = |
1 |
~xdm |
(354) |
|
|
||||
M |
||||
R
(with M = dm). The latter form comes from treating every little di erential chunk of a solid object like a “particle”, and adding them all up. Integration, recall, is just a way of adding them up.
Of course this leaves us with the recursive problem of the fact that “solid” objects are really made out of lots of point-like elementary particles and their fields. It is worth very briefly presenting the standard “coarse-graining” argument that permits us to treat solids and fluids like a continuum of smoothly distributed mass – and the limitations of that argument.
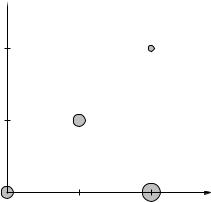
Example 4.1.1: Center of Mass of a Few Discrete Particles
y 
1 kg
2m
1m |
2 kg |
2 kg |
3 kg x |
1m |
2m |
Figure 47: A system of four massive particles.
In figure 47 above, a few discrete particles with masses given are located at the positions indicated. We would like to find the center of mass of this system of particles. We do this by arithmetically evaluating the algebraic expressions for the x and y components of the center of mass separately: