

- •Preface
- •Textbook Layout and Design
- •Preliminaries
- •See, Do, Teach
- •Other Conditions for Learning
- •Your Brain and Learning
- •The Method of Three Passes
- •Mathematics
- •Summary
- •Homework for Week 0
- •Summary
- •1.1: Introduction: A Bit of History and Philosophy
- •1.2: Dynamics
- •1.3: Coordinates
- •1.5: Forces
- •1.5.1: The Forces of Nature
- •1.5.2: Force Rules
- •Example 1.6.1: Spring and Mass in Static Force Equilibrium
- •1.7: Simple Motion in One Dimension
- •Example 1.7.1: A Mass Falling from Height H
- •Example 1.7.2: A Constant Force in One Dimension
- •1.7.1: Solving Problems with More Than One Object
- •Example 1.7.4: Braking for Bikes, or Just Breaking Bikes?
- •1.8: Motion in Two Dimensions
- •Example 1.8.1: Trajectory of a Cannonball
- •1.8.2: The Inclined Plane
- •Example 1.8.2: The Inclined Plane
- •1.9: Circular Motion
- •1.9.1: Tangential Velocity
- •1.9.2: Centripetal Acceleration
- •Example 1.9.1: Ball on a String
- •Example 1.9.2: Tether Ball/Conic Pendulum
- •1.9.3: Tangential Acceleration
- •Homework for Week 1
- •Summary
- •2.1: Friction
- •Example 2.1.1: Inclined Plane of Length L with Friction
- •Example 2.1.3: Find The Minimum No-Skid Braking Distance for a Car
- •Example 2.1.4: Car Rounding a Banked Curve with Friction
- •2.2: Drag Forces
- •2.2.1: Stokes, or Laminar Drag
- •2.2.2: Rayleigh, or Turbulent Drag
- •2.2.3: Terminal velocity
- •Example 2.2.1: Falling From a Plane and Surviving
- •2.2.4: Advanced: Solution to Equations of Motion for Turbulent Drag
- •Example 2.2.3: Dropping the Ram
- •2.3.1: Time
- •2.3.2: Space
- •2.4.1: Identifying Inertial Frames
- •Example 2.4.1: Weight in an Elevator
- •Example 2.4.2: Pendulum in a Boxcar
- •2.4.2: Advanced: General Relativity and Accelerating Frames
- •2.5: Just For Fun: Hurricanes
- •Homework for Week 2
- •Week 3: Work and Energy
- •Summary
- •3.1: Work and Kinetic Energy
- •3.1.1: Units of Work and Energy
- •3.1.2: Kinetic Energy
- •3.2: The Work-Kinetic Energy Theorem
- •3.2.1: Derivation I: Rectangle Approximation Summation
- •3.2.2: Derivation II: Calculus-y (Chain Rule) Derivation
- •Example 3.2.1: Pulling a Block
- •Example 3.2.2: Range of a Spring Gun
- •3.3: Conservative Forces: Potential Energy
- •3.3.1: Force from Potential Energy
- •3.3.2: Potential Energy Function for Near-Earth Gravity
- •3.3.3: Springs
- •3.4: Conservation of Mechanical Energy
- •3.4.1: Force, Potential Energy, and Total Mechanical Energy
- •Example 3.4.1: Falling Ball Reprise
- •Example 3.4.2: Block Sliding Down Frictionless Incline Reprise
- •Example 3.4.3: A Simple Pendulum
- •Example 3.4.4: Looping the Loop
- •3.5: Generalized Work-Mechanical Energy Theorem
- •Example 3.5.1: Block Sliding Down a Rough Incline
- •Example 3.5.2: A Spring and Rough Incline
- •3.5.1: Heat and Conservation of Energy
- •3.6: Power
- •Example 3.6.1: Rocket Power
- •3.7: Equilibrium
- •3.7.1: Energy Diagrams: Turning Points and Forbidden Regions
- •Homework for Week 3
- •Summary
- •4.1: Systems of Particles
- •Example 4.1.1: Center of Mass of a Few Discrete Particles
- •4.1.2: Coarse Graining: Continuous Mass Distributions
- •Example 4.1.2: Center of Mass of a Continuous Rod
- •Example 4.1.3: Center of mass of a circular wedge
- •4.2: Momentum
- •4.2.1: The Law of Conservation of Momentum
- •4.3: Impulse
- •Example 4.3.1: Average Force Driving a Golf Ball
- •Example 4.3.2: Force, Impulse and Momentum for Windshield and Bug
- •4.3.1: The Impulse Approximation
- •4.3.2: Impulse, Fluids, and Pressure
- •4.4: Center of Mass Reference Frame
- •4.5: Collisions
- •4.5.1: Momentum Conservation in the Impulse Approximation
- •4.5.2: Elastic Collisions
- •4.5.3: Fully Inelastic Collisions
- •4.5.4: Partially Inelastic Collisions
- •4.6: 1-D Elastic Collisions
- •4.6.1: The Relative Velocity Approach
- •4.6.2: 1D Elastic Collision in the Center of Mass Frame
- •4.7: Elastic Collisions in 2-3 Dimensions
- •4.8: Inelastic Collisions
- •Example 4.8.1: One-dimensional Fully Inelastic Collision (only)
- •Example 4.8.2: Ballistic Pendulum
- •Example 4.8.3: Partially Inelastic Collision
- •4.9: Kinetic Energy in the CM Frame
- •Homework for Week 4
- •Summary
- •5.1: Rotational Coordinates in One Dimension
- •5.2.1: The r-dependence of Torque
- •5.2.2: Summing the Moment of Inertia
- •5.3: The Moment of Inertia
- •Example 5.3.1: The Moment of Inertia of a Rod Pivoted at One End
- •5.3.1: Moment of Inertia of a General Rigid Body
- •Example 5.3.2: Moment of Inertia of a Ring
- •Example 5.3.3: Moment of Inertia of a Disk
- •5.3.2: Table of Useful Moments of Inertia
- •5.4: Torque as a Cross Product
- •Example 5.4.1: Rolling the Spool
- •5.5: Torque and the Center of Gravity
- •Example 5.5.1: The Angular Acceleration of a Hanging Rod
- •Example 5.6.1: A Disk Rolling Down an Incline
- •5.7: Rotational Work and Energy
- •5.7.1: Work Done on a Rigid Object
- •5.7.2: The Rolling Constraint and Work
- •Example 5.7.2: Unrolling Spool
- •Example 5.7.3: A Rolling Ball Loops-the-Loop
- •5.8: The Parallel Axis Theorem
- •Example 5.8.1: Moon Around Earth, Earth Around Sun
- •Example 5.8.2: Moment of Inertia of a Hoop Pivoted on One Side
- •5.9: Perpendicular Axis Theorem
- •Example 5.9.1: Moment of Inertia of Hoop for Planar Axis
- •Homework for Week 5
- •Summary
- •6.1: Vector Torque
- •6.2: Total Torque
- •6.2.1: The Law of Conservation of Angular Momentum
- •Example 6.3.1: Angular Momentum of a Point Mass Moving in a Circle
- •Example 6.3.2: Angular Momentum of a Rod Swinging in a Circle
- •Example 6.3.3: Angular Momentum of a Rotating Disk
- •Example 6.3.4: Angular Momentum of Rod Sweeping out Cone
- •6.4: Angular Momentum Conservation
- •Example 6.4.1: The Spinning Professor
- •6.4.1: Radial Forces and Angular Momentum Conservation
- •Example 6.4.2: Mass Orbits On a String
- •6.5: Collisions
- •Example 6.5.1: Fully Inelastic Collision of Ball of Putty with a Free Rod
- •Example 6.5.2: Fully Inelastic Collision of Ball of Putty with Pivoted Rod
- •6.5.1: More General Collisions
- •Example 6.6.1: Rotating Your Tires
- •6.7: Precession of a Top
- •Homework for Week 6
- •Week 7: Statics
- •Statics Summary
- •7.1: Conditions for Static Equilibrium
- •7.2: Static Equilibrium Problems
- •Example 7.2.1: Balancing a See-Saw
- •Example 7.2.2: Two Saw Horses
- •Example 7.2.3: Hanging a Tavern Sign
- •7.2.1: Equilibrium with a Vector Torque
- •Example 7.2.4: Building a Deck
- •7.3: Tipping
- •Example 7.3.1: Tipping Versus Slipping
- •Example 7.3.2: Tipping While Pushing
- •7.4: Force Couples
- •Example 7.4.1: Rolling the Cylinder Over a Step
- •Homework for Week 7
- •Week 8: Fluids
- •Fluids Summary
- •8.1: General Fluid Properties
- •8.1.1: Pressure
- •8.1.2: Density
- •8.1.3: Compressibility
- •8.1.5: Properties Summary
- •Static Fluids
- •8.1.8: Variation of Pressure in Incompressible Fluids
- •Example 8.1.1: Barometers
- •Example 8.1.2: Variation of Oceanic Pressure with Depth
- •8.1.9: Variation of Pressure in Compressible Fluids
- •Example 8.1.3: Variation of Atmospheric Pressure with Height
- •Example 8.2.1: A Hydraulic Lift
- •8.3: Fluid Displacement and Buoyancy
- •Example 8.3.1: Testing the Crown I
- •Example 8.3.2: Testing the Crown II
- •8.4: Fluid Flow
- •8.4.1: Conservation of Flow
- •Example 8.4.1: Emptying the Iced Tea
- •8.4.3: Fluid Viscosity and Resistance
- •8.4.4: A Brief Note on Turbulence
- •8.5: The Human Circulatory System
- •Example 8.5.1: Atherosclerotic Plaque Partially Occludes a Blood Vessel
- •Example 8.5.2: Aneurisms
- •Homework for Week 8
- •Week 9: Oscillations
- •Oscillation Summary
- •9.1: The Simple Harmonic Oscillator
- •9.1.1: The Archetypical Simple Harmonic Oscillator: A Mass on a Spring
- •9.1.2: The Simple Harmonic Oscillator Solution
- •9.1.3: Plotting the Solution: Relations Involving
- •9.1.4: The Energy of a Mass on a Spring
- •9.2: The Pendulum
- •9.2.1: The Physical Pendulum
- •9.3: Damped Oscillation
- •9.3.1: Properties of the Damped Oscillator
- •Example 9.3.1: Car Shock Absorbers
- •9.4: Damped, Driven Oscillation: Resonance
- •9.4.1: Harmonic Driving Forces
- •9.4.2: Solution to Damped, Driven, Simple Harmonic Oscillator
- •9.5: Elastic Properties of Materials
- •9.5.1: Simple Models for Molecular Bonds
- •9.5.2: The Force Constant
- •9.5.3: A Microscopic Picture of a Solid
- •9.5.4: Shear Forces and the Shear Modulus
- •9.5.5: Deformation and Fracture
- •9.6: Human Bone
- •Example 9.6.1: Scaling of Bones with Animal Size
- •Homework for Week 9
- •Week 10: The Wave Equation
- •Wave Summary
- •10.1: Waves
- •10.2: Waves on a String
- •10.3: Solutions to the Wave Equation
- •10.3.1: An Important Property of Waves: Superposition
- •10.3.2: Arbitrary Waveforms Propagating to the Left or Right
- •10.3.3: Harmonic Waveforms Propagating to the Left or Right
- •10.3.4: Stationary Waves
- •10.5: Energy
- •Homework for Week 10
- •Week 11: Sound
- •Sound Summary
- •11.1: Sound Waves in a Fluid
- •11.2: Sound Wave Solutions
- •11.3: Sound Wave Intensity
- •11.3.1: Sound Displacement and Intensity In Terms of Pressure
- •11.3.2: Sound Pressure and Decibels
- •11.4: Doppler Shift
- •11.4.1: Moving Source
- •11.4.2: Moving Receiver
- •11.4.3: Moving Source and Moving Receiver
- •11.5: Standing Waves in Pipes
- •11.5.1: Pipe Closed at Both Ends
- •11.5.2: Pipe Closed at One End
- •11.5.3: Pipe Open at Both Ends
- •11.6: Beats
- •11.7: Interference and Sound Waves
- •Homework for Week 11
- •Week 12: Gravity
- •Gravity Summary
- •12.1: Cosmological Models
- •12.2.1: Ellipses and Conic Sections
- •12.4: The Gravitational Field
- •12.4.1: Spheres, Shells, General Mass Distributions
- •12.5: Gravitational Potential Energy
- •12.6: Energy Diagrams and Orbits
- •12.7: Escape Velocity, Escape Energy
- •Example 12.7.1: How to Cause an Extinction Event
- •Homework for Week 12

Week 5: Torque and Rotation in One Dimension |
259 |
beginning to accommodate this. Of course, raising the ball slightly at the beginning also increases N so maybe it doesn’t ever slip. So the best we can solve for is the minimum height Hmin it must have to roll without slipping assuming that it doesn’t ever actually slip, and “reality” is probably a bit higher to accommodate or prevent slipping, overcome drag forces, and so on.
With that said, the problem’s solution is exactly the same as before except that in the energy conservation step one has to use:
mgHmin = 2mgR + 12 mvmin2 + 12 Iωmin2
plus the rolling constraint ωmin = vmin/r to get:
mgHmin = |
2mgR + |
1 |
mvmin2 |
+ |
|
1 |
mvmin2 |
||
2 |
5 |
||||||||
|
|
|
|
|
|
||||
= |
2mgR + |
7 |
mvmin2 |
|
|
|
|||
10 |
|
|
|
||||||
|
|
|
|
|
|
|
|||
Combine this with the usual:
|
mv2 |
|
mg = |
min |
|
R |
||
|
so that the ball “barely” loops the loop and you get:
(542)
(543)
(544)
Hmin = 2.7R |
(545) |
only a tiny bit higher than needed for a block sliding on a frictionless track.
Really, not all that di cult, right? All it takes is some practice, both redoing these examples on your own and doing the homework and it will all make sense.
5.8: The Parallel Axis Theorem
As we have seen, the moment of inertia of an object or collection of point-like objects is just
X |
|
I = miri2 |
(546) |
i
where ri is the distance between the axis of rotation and the point mass mi in a rigid system, or
Z
I = r2dm (547)
where r is the distance from the axis of rotation to “point mass” dm in the rigid object composed of continuously distributed mass.
However, in the previous section, we saw that the kinetic energy of a rigid object relative to an arbitrary origin can be written as the sum of the kinetic energy of the object itself treated as a total mass located at the (moving) center of mass plus the kinetic energy of the object in the moving center of mass reference frame.
For the particular case where a rigid object rotates uniformly around an axis that is parallel to an axis through the center of mass of the object, that is, in such a way that the angular velocity of the center of mass equals the angular velocity around the center of mass we can derive a theorem, called the Parallel Axis Theorem, that can greatly simplify problem solving while embodying the previous result for the kinetic energies. Let’s see how.
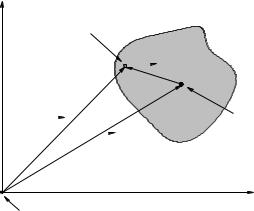
Suppose we want to find the moment of inertia of the arbitrary “blob shaped” rigid mass distribution pictured above in figure 76 about the axis labelled “New (Parallel) Axis”. This is, by
260 |
Week 5: Torque and Rotation in One Dimension |
|
dm |
|
r’ |
r |
CM Axis |
|
|
|
rcm |
New (Parallel) Axis
Figure 76: An arbitrary blob of total mass M rotates around the axis at the origin as shown. Note well the geometry of ~rcm, ~r′, and ~r = ~rcm + ~r′.
definition (and using the fact that ~r = ~rcm + ~r′ from the triangle of vectors shown in the figure):
Z
I = r2 dm
Z
=¡~rcm + ~r′¢ · ¡~rcm + ~r′¢ dm
Z
=¡rcm2 + r′2 + 2~rcm · ~r′¢ dm
= |
Z |
rcm2 dm + Z |
r′2 dm + 2~rcm · Z |
· |
~r′ dm |
~r′ dm¶ |
|||
= rcm2 |
Z dm + Z r′2 dm + 2M~rcm |
µ M Z |
|||||||
|
|
|
|
|
|
1 |
|
|
|
= M rcm2 + Icm + 2M~rcm · (0) |
|
|
|
|
(548) |
||||
|
|
|
|
|
|
|
|
|
|
or |
|
|
|
|
|
|
|
|
|
|
|
|
I = Icm + M rcm2 |
|
|
|
|
(549) |
|
In case that was a little fast for you, here’s what I did. I substituted ~rcm + ~r′ for ~r. I distributed out that product. I used the linearity of integration to write the integral of the sum as the sum of the integrals (all integrals over all of the mass of the rigid object, of course). I noted that ~rcm is
a constant and pulled it out of the integral, leaving me with the integral M = |
dm. I noted that |
|||
R |
2 |
|
|
its center of mass. I |
|
r′ dm is just Icm, the moment of intertia of the object about an axis through |
|||
|
R |
|||
noted that (1/M ) |
~r′dm is the position of the center of mass in center of mass coordinates, which |
|||
is zero – by |
definition the center of mass is at the origin of the center of mass frame. |
|||
|
R |
|
||
The result, in words, is that the moment of inertia of an object that uniformly rotates around any axis is the moment of inertia of the object about an axis parallel to that axis through the center of mass of the object plus the moment of inertia of the total mass of the object treated as a point mass located at the center of mass as it revolves!
This sounds a lot like the kinetic energy theorem; let’s see how the two are related.
As long as the object rotates uniformly – that is, the object goes around its own center one time for every time it goes around the axis of rotation, keeping the same side pointing in towards the center as it goes – then its kinetic energy is just:
K = |
|
1 |
Iω2 |
= |
1 |
(M rcm2 |
)ω2 + |
|
1 |
Icmω2 |
(550) |
|
2 |
2 |
2 |
||||||||||
|
|
|
|
|
|
|
||||||

Week 5: Torque and Rotation in One Dimension |
261 |
||||||||
A bit of algebraic legerdemain: |
) µ rcm |
¶ |
+ 2 Icmω2 = K(ofcm) + K(incm) |
|
|||||
K = 2 (M rcm2 |
(551) |
||||||||
|
1 |
|
|
vcm |
2 |
|
1 |
|
|
|
|
|
|
|
|||||
as before!
Warning! This will not work if an object is revolving many times around its own center of mass for each time it revolves around the parallel axis.
Example 5.8.1: Moon Around Earth, Earth Around Sun
This is a conceptual example, not really algebraic. You may have observed that the Moon always keeps the same face towards the Earth – it is said to be “gravitationally locked” by tidal forces so that this is true. This means that the Moon revolves once on its axis in exactly the same amount of time that the Moon itself revolves around the Earth. We could therefore compute the total angular kinetic energy of the Moon by assuming that it is a solid ball of mass M , radius r, in an orbit around the Earth of radius R, and a period of 28.5 days:
Imoon = M R2 + |
2 |
M r2 |
(552) |
|||||
5 |
||||||||
|
|
|
|
|
|
|
||
(from the parallel axis theorem), |
|
|
|
|||||
ω = |
2π |
|
|
|
(553) |
|||
T |
|
|
||||||
|
|
|
|
|
|
|||
(you’ll need to find T in seconds, 86400 × 28.5) and then: |
|
|||||||
K = |
1 |
Imoonω2 |
(554) |
|||||
|
||||||||
2 |
|
|
|
|
|
|
||
All that’s left is the arithmetic.
Contrast this with the Earth rotating around the Sun. It revolves on its own axis 365.25 times during the period in which it revolves around the Sun. To find it’s kinetic energy we could not use the parallel axis theorem, but we can still use the theorem at the end of the previous chapter. Here we would find two di erent angular velocities:
ωday = |
2π |
(555) |
||
|
|
|||
Tday |
||||
and |
2π |
|
||
ωyear = |
(556) |
|||
|
||||
Tyear |
||||
(again, 1 day = 86400 seconds is a good number to remember). Then if we let M be the mass of the Earth, r be its radius, and R be the radius of its orbit around the Sun (all numbers that are readily available on Wikipedia112 we could find the total kinetic energy (relative to the Sun) as:
K = 2 |
¡M R2¢ ωyear2 |
+ 2 |
µ |
5 M r2 |
¶ |
ωday2 |
(557) |
|
1 |
|
1 |
|
2 |
|
|
|
|
which is somewhat more complicated, no?
Let’s do a more readily evaluable example:
Example 5.8.2: Moment of Inertia of a Hoop Pivoted on One Side
In figure ?? a hoop of mass M and radius R is pivoted at a point on the side, on the hoop itself, not in the middle. We already know the moment of inertia of the hoop about its center of mass. What
112Wikipedia: http://www.wikipedia.org/wiki/Earth.