

Week 3: Work and Energy |
161 |
3.5: Generalized Work-Mechanical Energy Theorem
So, as suggested above let’s generalize the WKE one further step by considering what happens if both conservative and nonconservative forces are acting on a particle. In that case the argument above becomes:
Wtot = WC + WN C = |
K |
(315) |
or |
|
|
WN C = K − WC = K + |
U = Emech |
(316) |
which we state as the Generalized Non-Conservative Work-Mechanical Energy Theorem:
The work done by all the non-conservative forces acting on a particle equals the change in its total mechanical energy.
Our example here is very simple.
Example 3.5.1: Block Sliding Down a Rough Incline
Suppose a block of mass m slides down an incline of length L at an incline θ with respect to the horizontal and with kinetic friction (coe cient µk) acting against gravity. How fast is it going (released from rest at an angle where static friction cannot hold it) when it reaches the ground?
Here we have to do a mixture of several things. First, let’s write Newton’s Second Law for just the (static) y direction:
N − mg cos(θ) = 0 |
(317) |
or |
|
N = mg cos(θ) |
(318) |
Next, evaluate: |
|
fk = µkN = µkmg cos(θ) |
(319) |
(up the incline, opposite to the motion of the block). |
|
We ignore dynamics in the direction down the plane. Instead, we note that the work done by
friction is equal to the change in the mechanical energy of the block. |
Ei = mgH = mgL sin(θ). |
|||||||
Ef = 1 mv2 |
. So: |
|
||||||
2 |
1 |
|
|
|
||||
|
mv2 − mgH |
|
||||||
|
− µkmgL cos(θ) = Ef − Ei = |
|
(320) |
|||||
|
2 |
|||||||
or |
1 |
|
|
|
|
|
|
|
|
mv2 = mgH − µkmgL cos(θ) |
(321) |
||||||
|
|
|
||||||
|
|
2 |
||||||
so that: |
|
v = ±p |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
2gH − µk2gL cos(θ) |
(322) |
|||||
Here we really do have to be careful and choose the sign that means “going down the incline” at the bottom.
As an extra bonus, our answer tells us the condition on (say) the angle such that the mass doesn’t or just barely makes it to the bottom. v = 0 means “barely” (gets there and stops) and if v is imaginary, it doesn’t make all the way to the bottom at all.
I don’t know about you, but this seems a lot easier than messing with integrating Newton’s Law, solving for v(t) and x(t), solving for t, back substituting, etc. It’s not that this is all that di cult, but work-energy is simple bookkeeping, anybody can do it if they just know stu like the form of the potential energy, the magnitude of the force, some simple integrals.
Here’s another example.
162 |
Week 3: Work and Energy |
Example 3.5.2: A Spring and Rough Incline
x |
Hmax |
|
|
k |
|
m |
|
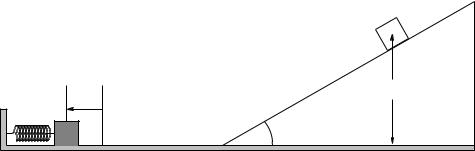
Figure 41: A spring compressed an initial distance x fires a mass m across a smooth (µk ≈ 0) floor to rise up a rough µk =6 0) incline. How far up the incline does it travel before coming to rest?
In figure 41 a mass m is released from rest from a position on a spring with spring constant k compressed a distance x from equilibrium. It slides down a frictionless horizontal surface and then slides up a rough plane inclined at an angle θ. What is the maximum height that it reaches on the incline?
This is a problem that is basically impossible, so far, for us to do using Newton’s Laws alone. This is because we are weeks away from being able to solve the equation of motion for the mass on the spring! Even if/when we can solve the equation of motion for the mass on the spring, though, this problem would still be quite painful to solve using Newton’s Laws and dynamical solutions directly.
Using the GWME Theorem, though, it is pretty easy. As before, we have to express the initial total mechanical energy and the final total mechanical energy algebraically, and set their di erence equal to the non-conservative work done by the force of kinetic friction sliding up the incline.
I’m not going to do every step for you, as this seems like it would be a good homework problem, but here are a few:
Ei = Ugi + Usi + Ki = mg(0) + |
1 |
k |
|
x2 + |
1 |
m(0)2 = |
1 |
k x2 |
(323) |
|
|
|
|
||||||
2 |
2 |
2 |
|||||||
Ef = Ugf + Kf = mgHmax + |
1 |
m(0)2 = mgHmax |
(324) |
||||||
|
|||||||||
2 |
|||||||||
Remaining for you to do: Find the force of friction down the incline (as it slides up). Find the work done by friction. Relate that work to Hmax algebraically, write the GWME Theorem algebraically, and solve for Hmax. Most of the steps involving friction and the inclined plane can be found in the previous example, if you get stuck, but try to do it without looking first!
3.5.1: Heat and Conservation of Energy
Note well that the theorem above only applies to forces acting on particles, or objects that we consider in the particle approximation (ignoring any internal structure and treating the object like a single mass). In fact, all of the rules above (so far) from Newton’s Laws on down strictly speaking only apply to particles in inertial reference frames, and we have some work to do in order to figure out how to apply them to systems of particles being pushed on both by internal forces between particles in the system as well as external forces between the particles of the system and particles that are not part of the system.

Week 3: Work and Energy |
163 |
What happens to the energy added to or removed from an object (that is really made up of many particles bound together by internal e.g. molecular forces) by things like my non-conservative hand as I give a block treated as a “particle” a push, or non-conservative kinetic friction and drag forces as they act on the block to slow it down as it slides along a table? This is not a trivial question. To properly answer it we have to descend all the way into the conceptual abyss of treating every single particle that makes up the system we call “the block” and every single particle that makes up the system consisting of “everything else in the Universe but the block” and all of the internal forces between them – which happen, as far as we can tell, to be strictly conservative forces – and then somehow average over them to recover the ability to treat the block like a particle, the table like a fixed, immovable object it slides on, and friction like a comparatively simple force that does non-conservative work on the block.
It requires us to invent things like statistical mechanics to do the averaging, thermodynamics to describe certain kinds of averaged systems, and whole new sciences such as chemistry and biology that use averaged energy concepts with their own fairly stable rules that cannot easily be connected back to the microscopic interactions that bind quarks and electrons into atoms and atoms together into molecules. It’s easy to get lost in this, because it is both fascinating and really di cult.
I’m therefore going to give you a very important empirical law (that we can understand well enough from our treatment of particles so far) and a rather heuristic description of the connections between microscopic interactions and energy and the macroscopic mechanical energy of things like blocks, or cars, or human bodies.
The important empirical law is the Law of Conservation of Energy86. Whenever we examine a physical system and try very hard to keep track of all of the mechanical energy exchanges withing that system and between the system and its surroundings, we find that we can always account for them all without any gain or loss. In other words, we find that the total mechanical energy of an isolated system never changes, and if we add or remove mechanical energy to/from the system, it has to come from or go to somewhere outside of the system. This result, applied to well defined systems of particles, can be formulated as the First Law of Thermodynamics:
Qin = Eof + Wby |
(325) |
In words, the heat energy flowing in to a system equals the change in the internal total mechanical energy of the system plus the external work (if any) done by the system on its surroundings. The total mechanical energy of the system itself is just the sum of the potential and kinetic energies of all of its internal parts and is simple enough to understand if not to compute. The work done by the system on its surroundings is similarly simple enough to understand if not to compute. The hard part of this law is the definition of heat energy, and sadly, I’m not going to give you more than the crudest idea of it right now and make some statements that aren’t strictly true because to treat heat correctly requires a major chunk of a whole new textbook on textbfThermodynamics. So take the following with a grain of salt, so to speak.
When a block slides down a rough table from some initial velocity to rest, kinetic friction turns the bulk organized kinetic energy of the collectively moving mass into disorganized microscopic energy – heat. As the rough microscopic surfaces bounce o of one another and form and break chemical bonds, it sets the actual molecules of the block bounding, increasing the internal microscopic mechanical energy of the block and warming it up. Some of it similarly increasing the internal microscopic mechanical energy of the table it slide across, warming it up. Some of it appears as light energy (electromagnetic radiation) or sound energy – initially organized energy forms that themselves become ever more disorganized. Eventually, the initial organized energy of the block becomes a tiny increase in the average internal mechanical energy of a very, very large number of objects both inside and outside of the original system that we call the block, a process we call being “lost to heat”.
86More properly, mass-energy, but we really don’t want to get into that in an introductory course.