In all cases thick bones are stronger than thin ones, long bones are weaker than short bones, all things being equal (which often is not the case). Still, this section should give you a good chance of understanding at least semi-quantitatively how bone strength varies and can be described with a few empirical parameters that can be connected (with a fair bit of work) all the way back to the intermolecular bonds within the bone itself and its physical structure.
9.6: Human Bone
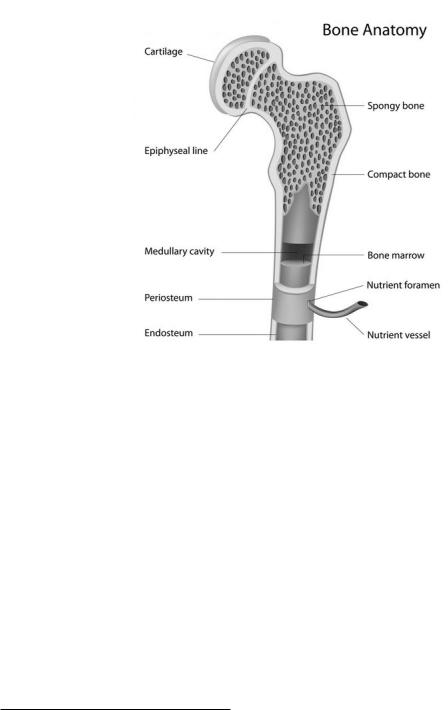
Figure 130: This figure illustrates the principle anatomical features of bone.
The bone itself is a composite material made up of a mix of living and dead cells embedded in a mineralized organic matrix. It has significant tensor structure – looking somewhat like a random honeycomb structure in cross section but with a laminated microstructure along the length of the bone. Its anatomy is illustrated in figure 130.
Bone is layered from the outside in. The very outer hard layer of a bone is called is periosteum199. In between is compact bone, or osteon that gives bone much of its strength. Nutrients flow into living bone tissue through holes in the bone called foramen, and are distributed up and down through the osteon through haversian canals (not shown) that are basically tubes through the bone for blood vessels that run along the bone’s length to perfuse it. The periosteum and osteon make up roughly 80% of the mass of a typical long bone.
Inside the osteon is softer inner bone called endosteum200. The inner bone is made up of a mix of di erent kinds of bone and other tissue that include spongy bone called trabeculae and bone marrow (where blood cells are stored and formed). It has only 20% of the bone’s mass, but 90% of the bone’s surface area. Much of the spongy bone material is filled with blood, to the point where a good way to characterize the di erence between the osteon and the trabeculae is that in the former, bone surrounds blood but in the latter, blood surrounds bone.
199Latin for “outer bone”. But it sounds much cooler in Latin, doesn’t it?
200Latin for – wait for it – “inner bone”.
The bone matrix itself is made up of a mix of inorganic and organic parts. The inorganic part is formed mostly of calcium hydroxylapatite (a kind of calcium phosphate that is quite rigid). The organic part is collagen, a protein that gives bone its toughness and elasticity in much the same way that tough steels are often a mix of soft iron and hard cementite particles, with the latter contributing hardness and compressive/extensive strength, the latter reducing the brittleness that often accompanies hardness and giving it a broader range of linear response elasticity.
There are two types of microscopically distinct bone. Woven bone has collagen fibers mixed haphazardly with the inorganic matrix, and is mechanically weak. Lamellar bone has a regular parallel alignment of collagen fibers into sheets (lamellae) that is mechanically strong. The latter give the osteon a laminar/layered structure aligned with the bone axis. Woven bone is an early developmental state of lamellar bone, seen in fetuses developing bones and in adults as the initial soft bone that forms in a healing fracture. It serves as a sort of template for the replacement/formation of lamellar bone.
Bones are typically connected together with surface layers of cartilage at the joints, augmented by tough connective tissue and tendons smoothly integrated into muscles that permit mobile bones to be articulated at the joints. Together, they make an impressive mechanical structure capable of an extraordinary range of motions and activities while still supporting and protecting softer tissue of our organs and circulatory system. Pretty cool!
Bone is quite strong. It fractures under compression at a stress of around 170 MPa in typical human bones, but has a smaller fracture stress under tension at 120 MPa and is relatively ¡I¿easy¡/i¿ to fracture with shear stresses of around 52 MPa. This is why it is “easy” (and common!) to break bones with shear stresses, less common to break them from naked compression or tension – typically other parts of the skeletal structure – tendons or cartilage in the joints – fail before the actual bone does in these situations.
Bone is basically brittle and easy to chip, but does have a significant degree of compressive, tensile, or shear elasticity (represented by e.g. Young’s modulus in the linear regime) contributed primarily by collagen in the bone tissue. Younger humans still have relatively elastic bones; as one ages one’s bones become first harder and tougher, and then (as repair mechanisms break down with age) weaker and more brittle.
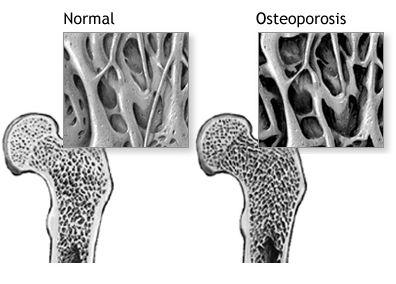
Figure 131: Illustration of the alteration of bone tissue accompanying osteoporosis.
Figure 131 above shows the changes in bone associated with osteoporosis, the gradual thinning
of the bone matrix as the skeleton starts to decalcify. This process is associated with age, especially in post-menopausal women, but it can also occur in association with e.g. corticosteroid therapy, cancer, or other diseases or conditions such as Paget’s disease in younger adults.
This process significantly weakens the bones of those a icted to the point where the static shear stresses associated with muscular articulation (for example, standing up) can break bones. A young person might fall and break their hip where a person with really significant osteoporosis can actually break their hip (from the stress of standing) and then fall. This is not a medical textbook and should not be treated as an authoritative guide to the practice of medicine (but rather, as a basis for understanding what one might by trying to learn in a directed study of medicine), but with that said, osteoporosis can be treated to some extent by things like hormone replacement therapy in women (it seems to go with the reduction of estrogen that occurs in menopause), calcium supplementation to help slow the loss of calcium, and certain drugs such as Fosamax (Alendronate) that reduce calcium loss and increase bone density (but that have risks and side e ects).
Example 9.6.1: Scaling of Bones with Animal Size
An interesting biological example of scaling laws in physics – and the reason I emphasize the dependence of many physically or physiologically interesting quantities on length and/or area – can be seen in the scaling of animal bones with the size of the animal201 . Let us consider this.
We have seen above that the scaling of the “spring constant” of a given material that governs its change in length or its transverse displacement under compression, tension, or shear is:
where X is the relevant (compression, tension, shear) modulus. Bone strength, including the point where the bone fractures under stresses of these sorts, might very reasonably be expected to be proportional to this constant and to scale similarly.
The leg bones of a four-legged animal have to be able to support the weight of that animal under compressive stress. This enables us to make the following scaling argument:
•In general, the weight of any animal is roughly proportional to its volume. Most animals are mostly made of water, and have a density close to that of water, so the volume of the animal times the density of water is a decent approximate guess of what its weight should be.
•In general, the volume of an animal (and hence its weight) is proportional to any characteristic length scale that describes the animal cubed. Obviously this won’t work well if one compares a snake, with one very long length and two very short lengths, to a comparatively round hippopotamus, but it won’t be crazy comparing mice to dogs to horses to elephants that all have reasonably similar body proportions. We’ll choose the animal height.
•The leg bones of the animal have a strength proportional to the cross-sectional area.
We would like to be able to estimate the thickness of an animal’s bone it’s known height and from a knowledge of the thickness of one kind of a “reference” animal’s bone and its height.
Our argument then is: The volume, and hence the weight, of an animal increases like the cube of its characteristic length (e.g. its height H). The strength of its bones that must support this weight goes like the square of the diameter D of those bones. Therefore:
201Wikipedia: http://www.wikipedia.org/wiki/On Being the Right Size. This and many other related arguments were collected by J. B. S. Haldane in an article titled On Being the Right Size, published in 1926. Collectively they are referred to as the Haldane Principle. However, the original idea (and 3/2 scaling law discussed below) is due to none other than Galileo Galilei!
426 |
|
|
Week 9: Oscillations |
where C is some constant of proportionality. Solving for D(H) we get: |
|
1 |
H3/2 |
|
D = √ |
|
(892) |
C |
This simple equation is approximately satisfied, although not exactly as given because our model for bones breaking does not reflect shear-driven ”buckling” and a related need for muscle to scale, for mammals ranging from small rodents through the mighty elephant. Bone thickness does indeed increase nonlinearly with respect to body size.


