

Week 1: Newton’s Laws |
63 |
(where C and C′ are set from our knowledge of the initial conditions, x(0) = 0 and v(0) = 0 in the coordinates we chose).
Now suppose that the blocks “fall” a height H (only m2 actually falls, m1 goes up). Then we can, as before, find out how long it takes for x(th) = H, then substitute this into vx(th) to find the speed. I leave it as an exercise to show that this answer is:
s
µ m2 − m1 ¶
vx(th) = 2gH (67) m1 + m2
Example 1.7.4: Braking for Bikes, or Just Breaking Bikes?
A car of mass M is overtaking a bicyclist. Initially, the car is travelling at speed v0c and the bicyclist is travelling at v0b < v0c in the same direction. At a time that the bicyclist is D meters away, the driver of the car suddenly sees that he is on a collision course and applies the brakes, exerting a force −F on his car (where the minus sign just means that he is slowing down, diminishing his velocity.
Assuming that the bicyclist doesn’t speed up or slow down, does he hit the bike?
At this point you should have a pretty good idea how to proceed for each object. First, we’ll draw a figure with both objects and formulate the equations of motion for each object separately. Second, we’ll solve the equations of motion for reach object. Third, we’ll write an equation that captures the condition that the car hits the bike, and see if that equation has any solutions. If so, then it is likely that the car will be breaking, not braking (in time)!
|
|
y |
|
|
|
t = 0 |
|
|
M |
|
m |
F |
v0c |
v0b |
|
|
|
D |
x |
|
|
|
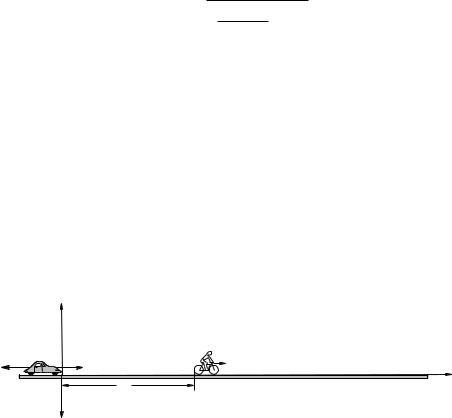
Figure 8: The initial picture of the car overtaking the bike at the instant it starts to brake. Again we will ignore the forces in the y-direction as we know that the car doesn’t jump over the bike and we’ll pretend that the biker can’t just turn and get out of the way as well.
Here’s the solution, without most of the details. You should work through this example, filling in the missing details and making the solution all pretty. The magnitude of the acceleration of the car is ac = F/M , and we’ll go ahead and use this constant acceleration ac to formulate the answer – we can always do the arithmetic and substitute at the end, given some particular values for F and
M .
Integrating this (and using xc(0) = 0, vc(0) = v0c) you will get:
vc(t) |
= |
−act + v0c |
(68) |
||
xc(t) |
= |
− |
1 |
act2 + v0ct |
(69) |
2 |
|||||
The acceleration of the bike is ab = 0. This means that:
vb(t) = abt + v0b = v0b |
(70) |
The velocity of the bike is constant because there is no (net) force acting on it and hence it has no acceleration. Integrating this one gets (using xb(0) = D):
xb(t) = v0bt + D |
(71) |