

206 |
Week 4: Systems of Particles, Momentum and Collisions |
of one of the two outgoing particles – say, its x-component – or we cannot solve for the remaining components without a knowledge of the interaction.
Of course in the game of pool103 we do know something very important about the interaction. It is a force that is exerted directly along the line connecting the centers of the balls at the instant they strike one another! This is just enough information for us to be able to mentally predict that the eight ball will go into the corner pocket if it begins at rest and is struck by the cue ball on the line from that pocket back through the center of the eight ball. This in turn is su cient to predict the trajectory of the cue ball as well.
Two dimensional elastic collisions are thus almost solvable from the kinematics. This makes them too di cult for students who are unlikely to spend much time analyzing actual collisions (although it is worth it to look them over in the specific context of a good example, one that many students have direct experience with, such as the game of pool/billiards). Physics majors should spend some time here to prepare for more di cult problems later, but life science students can probably skip this without any great harm.
One dimensional elastic collisions, on the other hand, have one momentum conservation equation and one energy conservation equation to use to solve for two unknown final velocities. The number of independent equations and unknowns match! We can thus solve one dimensional elastic collision problems without knowing the details of the collision force from the kinematics alone.
Things are somewhat simpler for fully elastic collisions. Although one only has one, two, or three momentum conservation equations, this precisely matches the number of components in the final velocity of the masses after they have stuck together. Fully inelastic collisions are thus the easiest collision problems to solve.
Partially inelastic collisions in any number of dimensions are the most di cult to solve. There one loses the energy conservation equation – one cannot even solve the one dimensional partially inelastic collision problem without either being given some additional information about the final state – typically the final velocity of one of the two particles so that the other can be found from momentum conservation – or solving the dynamical equations of motion, which is generally even more di cult.
This explains why this textbook focuses on only four relatively simple collision problems. We first study elastic collisions in one dimension, solving them in two slightly di erent ways that provide di erent insights into how the physics works out. I then talk briefly about elastic collisions in two dimensions in an “elective” section that can safely be omitted by non-physics majors (but is quite readable, I hope). We then cover inelastic collisions, concentrating on the easiest case (fully inelastic) but providing a simple example of a partially inelastic collision as well.
4.6: 1-D Elastic Collisions
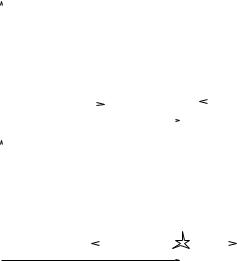
In figure 54 above, we see a typical one-dimensional collision between two masses, m1 and m2. m1 has a speed in the x-direction v1i > 0 and m2 has a speed v2i < 0, but our solution should not only handle the specific picture above, it should also handle the (common) case where m2 is initially at rest (v2i = 0) or even the case where m2 is moving to the right, but more slowly than m1 so that m1 overtakes it and collides with it, v1i > v2i > 0. Finally, there is nothing special about the labels “1” and “2” – our answer should be symmetric (still work if we label the mass on the left 2 and the mass on the right 1).
We seek final velocities that satisfy the two conditions that define an elastic collision.
103Or “billiards”.
Week 4: Systems of Particles, Momentum and Collisions |
207 |
|
|
|
|
Before Collision |
|
|
|
|
|
|
|
|
|||
|
|
m |
|
|
|
|
|
|
|
|
v |
|
m2 |
||
|
|
1 |
v1i |
|
|
|
2i |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xcm |
|
|
|
|
|
|
|
|
After Collision |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
m1 |
|
m2 |
|||||
|
|
|
|
|
|
v1f |
|
|
|
v2f |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xcm
Figure 54: Before and after snapshots of an elastic collision in one dimension, illustrating the important quantities.
Momentum Conservation: |
|
|
|
|
|
|
|
|
|
|
||
|
p~1i + p~2i |
|
= p~1f + p~2f |
|
|
|
|
|||||
m1v1ixˆ + m2v2ixˆ |
|
= m1v1f xˆ + m2v2f xˆ |
|
|
|
(407) |
||||||
m1v1i + m2v2i |
|
= m1v1f + m2v2f (x-direction only) |
(408) |
|||||||||
Kinetic Energy Conservation: |
|
|
|
|
|
|
|
|
|
|
||
|
|
Ek1i + Ek2i |
= Ek1f + Ek2f |
|
||||||||
|
1 |
m1v12i + |
|
1 |
m2v22i |
= |
1 |
m1v12f + |
|
1 |
m2v22f |
(409) |
2 |
2 |
|
2 |
|||||||||
|
|
2 |
|
|
|
|||||||
Note well that although our figure shows m2 moving to the left, we expressed momentum conservation without an assumed minus sign! Our solution has to be able to handle both positive and negative velocities for either mass, so we will assume them to be positive in our equations and simply use a negative value for e.g. v2i if it happens to be moving to the left in an actual problem we are trying to solve.
The big question now is: Assuming we know m1, m2, v1i and v2i, can we find v1f and v2f , even though we have not specified any of the details of the interaction between the two masses during the collision? This is not a trivial question! In three dimensions, the answer might well be no, not without more information. In one dimension, however, we have two independent equations and two unknowns, and it turns out that these two conditions alone su ce to determine the final velocities.
To get this solution, we must solve the two conservation equations above simultaneously. There are three ways to proceed.
One is to use simple substitution – manipulate the momentum equation to solve for (say) v2f in terms of v1f and the givens, substitute it into the energy equation, and then brute force solve the energy equation for v1f and back substitute to get v2f . This involves solving an annoying quadratic (and a horrendous amount of intermediate algebra) and in the end, gives us no insight at all into the conceptual “physics” of the solution. We will therefore avoid it, although if one has the patience and care to work through it it will give one the right answer.
The second approach is basically a much better/smarter (but perhaps less obvious) algebraic
208 |
Week 4: Systems of Particles, Momentum and Collisions |
solution, and gives us at least one important insight. We will treat it – the “relative velocity” approach – first in the subsections below.
The third is the most informative, and (in my opinion) the simplest, of the three solutions – once one has mastered the concept of the center of mass reference frame outlined above. This “center of mass frame” approach (where the collision occurs right in front of your eyes, as it were) is the one I suggest that all students learn, because it can be reduced to four very simple steps and because it yields by far the most conceptual understanding of the scattering process.
4.6.1: The Relative Velocity Approach
As I noted above, using direct substitution openly invites madness and frustration for all but the most skilled young algebraists. Instead of using substitution, then, let’s rearrange the energy conservation equation and momentum conservation equations to get all of the terms with a common mass on the same side of the equals signs and do a bit of simple manipulation of the energy equation as well:
m1v12i − m1v12f m1(v12i − v12f )
m1(v1i − v1f )(v1i + v1f )
(from energy conservation) and
= m2v22f − m2v22i |
|
|
= |
m2(v22f − v22i) |
|
= |
m2(v2f − v2i)(v2i + v2f ) |
(410) |
m1(v1i − v1f ) = m2(v2f − v2i) |
(411) |
(from momentum conservation).
When we divide the first of these by the second (subject to the condition that v1i =6 v1f and v2i =6 v2f to avoid dividing by zero, a condition that incidentally guarantees that a collision occurs as one possible solution to the kinematic equations alone is always for the final velocities to equal the initial velocities, meaning that no collision occured), we get:
(v1i + v1f ) = (v2i + v2f ) |
(412) |
or (rearranging): |
|
(v2f − v1f ) = −(v2i − v1i) |
(413) |
This final equation can be interpreted as follows in English: The relative velocity of recession after a collision equals (minus) the relative velocity of approach before a collision. This is an important conceptual property of elastic collisions.
Although it isn’t obvious, this equation is independent from the momentum conservation equation and can be used with it to solve for v1f and v2f , e.g. –
v2f |
= v1f − (v2i − v1i) |
|
|
m1v1i + m2v2i |
= |
m1v1f + m2(v1f − (v2i − v1i)) |
|
(m1 + m2)v1f |
= |
(m1 − m2)v1i + 2m2v2i |
(414) |
Instead of just solving for v1f and either backsubstituting or invoking symmetry to find v2f we now work a bit of algebra magic that you won’t see the point of until the end. Specifically, let’s add zero to this equation by adding and subtracting m1v1i:
(m1 + m2)v1f |
= |
(m1 − m2)v1i + 2m2v2i + (m1v1i − m1v1i) |
|
||
(m1 + m2)v1f |
= |
−(m1 + m2)v1i + 2 (m2v2i + m1v1i) |
(415) |
||
(check this on your own). Finally, we divide through by m1 + m2 and get: |
|
||||
|
v1f = −v1i + 2 |
m1v1i + m2v2i |
|
(416) |
|
|
m1 + m2 |
||||
Week 4: Systems of Particles, Momentum and Collisions |
209 |
The last term is just two times the total initial momentum divided by the total mass, which we should recognize to be able to write:
v1f = −v1i + 2vcm |
(417) |
There is nothing special about the labels “1” and “2”, so the solution for mass 2 must be identical :
v2f = −v2i + 2vcm |
(418) |
although you can also obtain this directly by backsubstituting v1f into equation 413.
This solution looks simple enough and isn’t horribly di cult to memorize, but the derivation is di cult to understand and hence learn. Why do we perform the steps above, or rather, why should we have known to try those steps? The best answer is because they end up working out pretty well, a lot better than brute force substitutions (the obvious thing to try), which isn’t very helpful. We’d prefer a good reason, one linked to our eventual conceptual understanding of the scattering process, and while equation 413 had a whi of concept and depth and ability to be really learned in it (justifying the work required to obtain the result) the “magical” appearance of vcm in the final answer in a very simple and symmetric way is quite mysterious (and only occurs after performing some adding-zero-in-just-the-right-form dark magic from the book of algebraic arts).
To understand the collision and why this in particular is the answer, it is easiest to put everything into the center of mass (CM) reference frame, evaluate the collision, and then put the results back into the lab frame! This (as we will see) naturally leads to the same result, but in a way we can easily understand and that gives us valuable practice in frame transformations besides!
4.6.2: 1D Elastic Collision in the Center of Mass Frame
Here is a bone-simple recipe for solving the 1D elastic collision problem in the center of mass frame.
a)Transform the problem (initial velocities) into the center of mass frame.
b)Solve the problem. The “solution” in the center of mass frame is (as we will see) trivial: Reverse the center of mass velocities.
c)Transform the answer back into the lab/original frame.
Suppose as before we have two masses, m1 and m2, approaching each other with velocities v1i and v2i, respectively. We start by evaluating the velocity of the CM frame:
vcm = |
m1v1i |
+ m2v2i |
(419) |
|
m1 |
+ m2 |
|||
|
|
and then transform the initial velocities into the CM frame:
v1′ i |
= |
v1i − vcm |
(420) |
v2′ i |
= |
v2i − vcm |
(421) |
We know that momentum must be conserved in any inertial coordinate frame (in the impact approximation). In the CM frame, of course, the total momentum is zero so that the momentum conservation equation becomes:
m1v1′ i + m2v2′ i |
= |
m1v1′ f + m2v2′ f |
(422) |
p1′ i + p2′ i |
= |
p1′ f + p2′ f = 0 |
(423) |
210 |
Week 4: Systems of Particles, Momentum and Collisions |
Thus p′i = p′1i = −p′2i and p′f = p′1f = −p′2f . The energy conservation equation (in terms of the p’s) becomes:
|
|
|
p′2 |
|
|
|
p′2 |
|
|
pf′2 |
|
pf′2 |
|
|
|
|
|||||||
|
|
|
i |
|
+ |
|
i |
|
|
= |
|
|
|
|
+ |
|
|
|
or |
|
|
||
pi′2 |
µ |
2m1 |
2m2 |
|
2m1 |
2m2 |
|
¶ |
so that |
||||||||||||||
2m1 |
+ 2m2 |
¶ |
= |
pf′2 |
µ |
2m1 |
+ |
2m2 |
|||||||||||||||
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
pi′2 |
= |
pf′2 |
|
|
|
|
|
|
|
|
(424) |
|||
Taking the square root of both sides (and recalling that p′i refers equally well to mass 1 or 2):
p1′ f |
= |
±p1′ i |
(425) |
p2′ f |
= |
±p2′ i |
(426) |
The + sign rather obviously satisfies the two conservation equations. The two particles keep on going at their original speed and with their original energy! This is, actually, a perfectly good solution to the scattering problem and could be true even if the particles “hit” each other. The more interesting case (and the one that is appropriate for “hard” particles that cannot interpenetrate) is for the particles to bounce apart in the center of mass frame after the collision. We therefore choose the minus sign in this result:
p′ |
= m |
v′ |
= |
− |
m |
v′ |
= |
p′ |
(427) |
1f |
1 |
1f |
|
1 |
1i |
|
− 1i |
|
|
p′ |
= m |
v′ |
= |
− |
m |
v′ |
= |
p′ |
(428) |
2f |
2 |
2f |
|
2 |
2i |
|
− 2i |
|
Since the masses are the same before and after we can divide them out of each equation and obtain the solution to the elastic scattering problem in the CM frame as:
v1′ f |
= |
−v1′ i |
(429) |
v2′ f |
= |
−v2′ i |
(430) |
or the velocities of m1 and m2 reverse in the CM frame.
This actually makes sense. It guarantees that if the momentum was zero before it is still zero, and since the speed of the particles is unchanged (only the direction of their velocity in this frame changes) the total kinetic energy is similarly unchanged.
Finally, it is trivial to put the these solutions back into the lab frame by adding vcm to them:
v1f |
= v1′ f + vcm |
|
|
|
= |
−v1′ i + vcm |
|
|
= −(v1i − vcm) + vcm or |
|
|
v1f |
= |
−v1i + 2vcm and similarly |
(431) |
v2f |
= |
−v2i + 2vcm |
(432) |
These are the exact same solutions we got in the first example/derivation above, but now they have considerably more meaning. The “solution” to the elastic collision problem in the CM frame is that the velocities reverse (which of course makes the relative velocity of approach be the negative of the relative velocity of recession, by the way). We can see that this is the solution in the center of mass frame in one dimension without doing the formal algebra above, it makes sense!
That’s it then: to solve the one dimensional elastic collision problem all one has to do is transform the initial velocities into the CM frame, reverse them, and transform them back. Nothing to it.
Note that (however it is derived) these solutions are completely symmetric – we obviously don’t care which of the two particles is labelled “1” or “2”, so the answer should have exactly the same

Week 4: Systems of Particles, Momentum and Collisions |
211 |
form for both. Our derived answers clearly have that property. In the end, we only need one equation (plus our ability to evaluate the velocity of the center of mass):
vf = −vi + 2vcm |
(433) |
valid for either particle.
If you are a physics major, you should be prepared to derive this result one of the various ways it can be derived (I’d strongly suggest the last way, using the CM frame). If you are e.g. a life science major or engineer, you should derive this result for yourself at least once, at least one of the ways (again, I’d suggest that last one) but then you are also welcome to memorize/learn the resulting solution well enough to use it.
Note well! If you remember the three steps needed for the center of mass frame derivation, even if you forget the actual solution on a quiz or a test – which is probably quite likely as I have little confidence in memorization as a learning tool for mountains of complicated material – you have a prayer of being able to rederive it on a test.
4.6.3: The “BB/bb” or “Pool Ball” Limits
In collision problems in general, it is worthwhile thinking about the “ball bearing and bowling ball (BB) limits”104. In the context of elastic 1D collision problems, these are basically the asymptotic results one obtains when one hits a stationary bowling ball (large mass, BB) with rapidly travelling ball bearing (small mass, bb).
This should be something you already know the answer to from experience and intuition. We all know that if you shoot a bb gun at a bowling ball so that it collides elastically, it will bounce back o of it (almost) as fast as it comes in and the bowloing ball will hardly recoil105. Given that vcm in this case is more or less equal to vBB , that is, vcm ≈ 0 (just a bit greater), note that this is exactly what the solution predicts.
What happens if you throw a bowling ball at a stationary bb? Well, we know perfectly well that the BB in this case will just continue barrelling along at more or less vcm (still roughly equal to the velocity of the more massive bowling ball) – ditto, when your car hits a bug with the windshield, it doesn’t significantly slow down. The bb (or the bug) on the other hand, bounces forward o of the BB (or the windshield)!
In fact, according to our results above, it will bounce o the BB and recoil forward at approximately twice the speed of the BB. Note well that both of these results preserve the idea derived above that the relative velocity of approach equals the relative velocity of recession, and you can transform from one to the other by just changing your frame of reference to ride along with BB or bb – two di erent ways of looking at the same collision.
Finally, there is the “pool ball limit” – the elastic collision of roughly equal masses. When the cue ball strikes another ball head on (with no English), then as pool players well know the cue ball stops (nearly) dead and the other ball continues on at the original speed of the cue ball. This, too, is exactly what the equations/solutions above predict, since in this case vcm = v1i/2.
Our solutions thus agree with our experience and intuition in both the limits where one mass is much larger than the other and when they are both roughly the same size. One has to expect that they are probably valid everywhere. Any answer you derive (such as this one) ultimately has to pass the test of common-sense agreement with your everyday experience. This one seems to, however di cult the derivation was, it appears to be correct!
104Also known as the “windshield and bug limits”...
105...and you’ll put your eye out – kids, do not try this at home!
212 |
Week 4: Systems of Particles, Momentum and Collisions |
As you can probably guess from the extended discussion above, pool is a good example of a game of “approximately elastic collisions” because the hard balls used in the game have a very elastic coe cient of restitution, another way of saying that the surfaces of the balls behave like very small, very hard springs and store and re-release the kinetic energy of the collision from a conservative impulse type force.
However, it also opens up the question: What happens if the collision between two balls is not along a line? Well, then we have to take into account momentum conservation in two dimensions. So alas, my fellow human students, we are all going to have to bite the bullet and at least think a bit about collisions in more than one dimension.