

156 |
Week 3: Work and Energy |
Now we can choose the zero of potential energy to be at the position x = 0 by doing the definite integral:
Us(x) = −Z0 |
(−k(x′ − xeq)) dx′ = |
2 k(x − xeq)2 − |
2 kxeq2 |
(291) |
||
|
x |
1 |
|
1 |
|
|
If we now change variables to, say, y = x − xeq, this is just:
Us(y) = |
1 |
ky2 − |
1 |
kxeq2 |
= |
1 |
ky2 + U0 |
(292) |
|
|
|
|
|
||||||
2 |
2 |
2 |
|||||||
which can be compared to the indefinite integral form above. Later, we’ll do a problem where a mass hangs from a spring and see that our freedom to add an arbitrary constant of integration allows us to change variables to an ”easier” origin of coordinates halfway through a problem.
Consider: our treatment of the spring gun (above) would have been simpler, would it not, if we could have simply started knowing the potential energy function for (and hence the work done by) a spring?
There is one more way that using potential energy instead of work per se will turn out to be useful to us, and it is the motivation for including the leading minus sign in its definition. Suppose that you have a mass m that is moving under the influence of a conservative force. Then the Work-Kinetic Energy Theorem (259) looks like:
WC = K |
(293) |
where WC is the ordinary work done by the conservative force. Subtracting WC over to the other side and substituting, one gets:
K − WC = K + U = 0 |
(294) |
Since we can now assign U (~x) a unique value (once we set the constant of integration or place(s) U (~x) is zero in its definition above) at each point in space, and since K is similarly a function of position in space when time is eliminated in favor of position and no other (non-conservative) forces are acting, we can define the total mechanical energy of the particle to be:
Emech = K + U |
(295) |
in which case we just showed that |
|
Emech = 0 |
(296) |
Wait, did we just prove that Emech is a constant any time a particle moves around under only
the influence of conservative forces? We did...
3.4: Conservation of Mechanical Energy
OK, so maybe you missed that last little bit. Let’s make it a bit clearer and see how enormously useful and important this idea is.
First we will state the principle of the Conservation of Mechanical Energy:
The total mechanical energy (defined as the sum of its potential and kinetic energies) of a particle being acted on by only conservative forces is constant.
Or (in much more concise algebra), if only conservative forces act on an object and U is the potential energy function for the total conservative force, then
Emech = K + U = A scalar constant |
(297) |
Week 3: Work and Energy |
157 |
The proof of this statement is given above, but we can recapitulate it here. |
|
Suppose |
|
Emech = K + U |
(298) |
Because the change in potential energy of an object is just the path-independent negative work done by the conservative force,
K + U = K − WC = 0 |
(299) |
is just a restatement of the WKE Theorem, which we derived and proved. So it must be true! But then
K + U = Δ(K + U ) = Emech = 0 |
(300) |
and Emech must be constant as the conservative force moves the mass(es) around.
3.4.1: Force, Potential Energy, and Total Mechanical Energy
Now that we know what the total mechanical energy is, the following little litany might help you conceptually grasp the relationship between potential energy and force. We will return to this still again below, when we talk about potential energy curves and equilibrium, but repetition makes the ideas easier to understand and remember, so skim it here first, now.
The fact that the force is the negative derivative of (or gradient of) the potential energy of an object means that the force points in the direction the potential energy decreases in.
This makes sense. If the object has a constant total energy, and it moves in the direction of the force, it speeds up! Its kinetic energy increases, therefore its potential energy decreases. If it moves from lower potential energy to higher potential energy, its kinetic energy decreases, which means the force pointed the other way, slowing it down.
There is a simple metaphor for all of this – the slope of a hill. We all know that things roll slowly down a shallow hill, rapidly down a steep hill, and just fall right o of cli s. The force that speeds them up is related to the slope of the hill, and so is the rate at which their gravitational potential energy increases as one goes down the slope! In fact, it isn’t actually just a metaphor, more like an example.
Either way, “downhill” is where potential energy variations push objects – in the direction that the potential energy maximally decreases, with a force proportional to the rate at which it decreases. The WKE Theorem itself and all of our results in this chapter, after all, are derived from Newton’s Second Law – energy conservation is just Newton’s Second Law in a time-independent disguise.
Example 3.4.1: Falling Ball Reprise
To see how powerful this is, let us look back at a falling object of mass m (neglecting drag and friction). First, we have to determine the gravitational potential energy of the object a height y above the ground (where we will choose to set U (0) = 0):
Z y
U (y) = − (−mg)dy = mgy (301)
0
Wow, that was kind of – easy!
Now, suppose we have our ball of mass m at the height H and drop it from rest, yadda yadda. How fast is it going when it hits the ground? This time we simply write the total energy of the ball at the top (where the potential is mgH and the kinetic is zero) and the bottom (where the potential
is zero and kinetic is 1 mv2) and set the two equal! Solve for v, done: |
|
||||
2 |
|
|
|
|
|
Ei = mgH + (0) = (0) + |
1 |
mv2 |
= Ef |
(302) |
|
2 |
|||||
|
|
|
|
||
158 |
|
Week 3: Work and Energy |
or |
|
|
v = p |
|
|
2gH |
(303) |
|
Even better: |
|
|
Example 3.4.2: Block Sliding Down Frictionless Incline Reprise
The block starts out a height H above the ground, with potential energy mgH and kinetic energy of 0. It slides to the ground (no non-conservative friction!) and arrives with no potential energy and kinetic energy 12 mv2. Whoops, time to block-copy the previous solution:
Ei = mgH + (0) = (0) + |
1 |
mv2 |
= Ef |
(304) |
|||
2 |
|||||||
|
|
|
|
|
|
||
or |
|
|
|
|
|||
v = p |
|
|
|
|
|
|
|
2gH |
|
|
|
(305) |
|||
Example 3.4.3: A Simple Pendulum
Here are two versions of a pendulum problem: Imagine a pendulum (ball of mass m suspended on a string of length L that we have pulled up so that the ball is a height H < L above its lowest point on the arc of its stretched string motion. We release it from rest. How fast is it going at the bottom? Yep, you guessed it – block copy again:
Ei = mgH + (0) = (0) + |
1 |
mv2 |
= Ef |
(306) |
|||
2 |
|||||||
|
|
|
|
|
|
||
or |
|
|
|
|
|||
v = p |
|
|
|
|
|
|
|
2gH |
|
|
|
(307) |
|||
It looks as though it does not matter what path a mass takes as it goes down a height H starting from rest – as long as no forces act to dissipate or add energy to the particle, it will arrive at the bottom travelling at the same speed.
θ
L
L
m  H v0
H v0
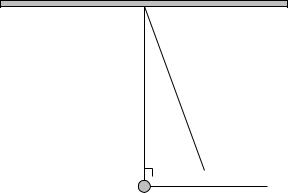
Figure 39: Find the maximum angle through which the pendulum swings from the initial conditions.
Here’s the same problem, formulated a di erent way: A mass m is hanging by a massless thread of length L and is given an initial speed v0 to the right (at the bottom). It swings up and stops at some maximum height H at an angle θ as illustrated in figure 39 (which can be used “backwards” as the figure for the first part of this example, of course). Find θ.
Again we solve this by setting Ei = Ef (total energy is conserved).

Week 3: Work and Energy |
|
|
|
|
|
|
|
|
|
|
159 |
|
Initial: |
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
Ei = |
mv02 + mg(0) = |
|
mv02 |
(308) |
|||||||
|
2 |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
||||
Final: |
1 |
|
|
|
|
|
|
|
|
|
||
Ef = |
m(0)2 + mgH = mgL(1 − cos(θ)) |
(309) |
||||||||||
|
|
|||||||||||
|
2 |
|||||||||||
(Note well: H = L(1 − cos(θ))!) |
|
|
|
|
|
|
|
|
|
|
|
|
Set them equal and solve: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v2 |
|
|
|
|
||
|
|
|
|
cos(θ) = 1 − |
0 |
|
|
|
|
(310) |
||
|
|
|
|
2gL |
|
|
|
|||||
or |
|
|
|
|
|
v2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
θ = cos−1(1 − |
0 |
|
). |
(311) |
|||||
|
|
|
2gL |
|||||||||
Example 3.4.4: Looping the Loop
m
 v
v
H
R
Figure 40:
Here is a lovely problem – so lovely that you will solve it five or six times, at least, in various forms throughout the semester, so be sure that you get to where you understand it – that requires you to use three di erent principles we’ve learned so far to solve:
What is the minimum height H such that a block of mass m loops-the-loop (stays on the frictionless track all the way around the circle) in figure 40 above?
Such a simple problem, such an involved answer. Here’s how you might proceed. First of all, let’s understand the condition that must be satisfied for the answer “stay on the track”. For a block to stay on the track, it has to touch the track, and touching something means “exerting a normal force on it” in physicsspeak. To barely stay on the track, then – the minimal condition – is for the normal force to barely go to zero.
Fine, so we need the block to precisely “kiss” the track at near-zero normal force at the point where we expect the normal force to be weakest. And where is that? Well, at the place it is moving the slowest, that is to say, the top of the loop. If it comes o of the loop, it is bound to come o at or before it reaches the top.
Why is that point key, and what is the normal force doing in this problem. Here we need two physical principles: Newton’s Second Law and the kinematics of circular motion since the mass is undoubtedly moving in a circle if it stays on the track. Here’s the way we reason: “If the
160 |
Week 3: Work and Energy |
block moves in a circle of radius R at speed v, then its acceleration towards the center must be ac = v2/R. Newton’s Second Law then tells us that the total force component in the direction of the center must be mv2/R. That force can only be made out of (a component of) gravity and the normal force, which points towards the center. So we can relate the normal force to the speed of the block on the circle at any point.”
At the top (where we expect v to be at its minimum value, assuming it stays on the circle) gravity points straight towards the center of the circle of motion, so we get:
mg + N = |
mv2 |
|
|
(312) |
|
|
||
|
R |
|
and in the limit that N → 0 (“barely” looping the loop) we get the condition:
|
mv2 |
|
|
mg = |
t |
(313) |
|
R |
|||
|
|
where vt is the (minimum) speed at the top of the track needed to loop the loop.
Now we need to relate the speed at the top of the circle to the original height H it began at. This is where we need our third principle – Conservation of Mechanical Energy! Note that we cannot possible integrate Newton’s Second Law and solve an equation of motion for the block on the frictionless track – I haven’t given you any sort of equation for the track (because I don’t know it) and even a physics graduate student forced to integrate N2 to find the answer for some relatively “simple” functional form for the track would su er mightily finding the answer. With energy we don’t care about the shape of the track, only that the track do no work on the mass which (since it is frictionless and normal forces do no work) is in the bag.
Thus: |
1 |
|
|
|
|
Ei = mgH = mg2R + |
mvt2 |
= Ef |
(314) |
||
2 |
|||||
|
|
|
|
If you put these two equations together (e.g. solve the first for mvt2 and substitute it into the second, then solve for H in terms of R) you should get Hmin = 5R/2. Give it a try. You’ll get even more practice in your homework, for some more complicated situations, for masses on strings or rods – they’re all the same problem, but sometimes the Newton’s Law condition will be quite di erent! Use your intuition and experience with the world to help guide you to the right solution in all of these causes.
So any time a mass moves down a distance H, its change in potential energy is mgH, and since total mechanical energy is conserved, its change in kinetic energy is also mgH the other way. As one increases, the other decreases, and vice versa!
This makes kinetic and potential energy bone simple to use. It also means that there is a lovely analogy between potential energy and your savings account, kinetic energy and your checking account, and cash transfers (conservative movement of money from checking to savings or vice versa where your total account remains constant.
Of course, it is almost too much to expect for life to really be like that. We know that we always have to pay banking fees, teller fees, taxes, somehow we never can move money around and end up with as much as we started with. And so it is with energy.
Well, it is and it isn’t. Actually conservation of energy is a very deep and fundamental principle of the entire Universe as best we can tell. Energy seems to be conserved everywhere, all of the time, in detail, to the best of our ability to experimentally check. However, useful energy tends to decrease over time because of “taxes”. The tax collectors, as it were, of nature are non-conservative forces!
What happens when we try to combine the work done by non-conservative forces (which we must tediously calculate per problem, per path) with the work done by conservative ones, expressed in terms of potential and total mechanical energy? You get the...