

17.3 Оптична компенсація зсуву зображення поворотом оптичних клинів
Розглянемо особливості методу ОКЗЗ, здійснюваного двома обертовими в протилежні сторони оптичними клинами, розташованими перед об'єктивом аерофотоапарата (рис. 3.29).
Оптичний клин представляє собою призму з дуже малим (20...40о) заломлюючим кутом. Для оптичного клина характерна відсутність спектрального розкладання падаючого світлового потоку. З метою збереження гомоцентричності світлового пучка оптичний клин встановлюється в рівнобіжних променях до об'єктива, чи усередині його між компонентами з рівнобіжним ходом променів між ними.
Падаючий на клин рівнобіжний світловий потік після проходження через клин із заломлюючим кутом ε відхиляється від первісного напрямку убік основи клина на кут γ, величина якого дорівнює:
![]() , (3.26)
, (3.26)
де β – кут нахилу світлових променів;
п – показник переломлення.

Рис. 3.29. Схема, що пояснює спосіб ОКЗЗ за допомогою оптичних клинів
Для малих кутів нахилу формула (3.26) приймає вигляд
![]() , (3.27)
, (3.27)
а зсув зображення у фокальній площині аерофотоапарата буде визначатися за формулою
![]() .
(3.28)
.
(3.28)
При рівномірному обертанні оптичного клина навколо осі, що збігається з головною оптичною віссю системи аерофотоапарата, при відсутності поступального руху аерофотоапарата зображення точок ділянки місцевості, що фотографується, при досить малих кутах нахилу світлових променів будуть описувати у фокальній площині аерофотоапарата окружності з радіусом r.

Рис. 3.30. Діаграма зміни величини і напрямку швидкості результуючого руху зображення
Вектор швидкості переміщення зображення цих точок буде змінюватися від 0 до 360° за напрямком, а абсолютна величина швидкості Vк, чи переміщення швидкості компенсації буде дорівнювати
Vк = ωка r , (3.29)
де ωка – кутова швидкість обертання клина. Формула (3.29) може бути записана в іншому вигляді:
![]() , (3.30)
, (3.30)
де N – частота обертання клина чи число оборотів клина в одиницю часу.
При компенсації зсуву зображення одним обертовим клином має місце похибка, обумовлена поперечною декомпенсацією, і похибка через хроматичні аберації, внесені клином. Все це вимагає вживання спеціальних заходів для усунення впливу цих похибок.
Аналізуючи явища, що відбуваються у фокальній площині АФА, (рис. 3.30), дійдемо висновку, що результуючий рух VΣ зображення є результатом додавання від двох рухів: від поступального руху літака зі швидкістю Vиз, спрямованою убік руху літака, і від обертального руху оптичних клинів зі швидкістю Vк, спрямованою по дотичній до окружності з радіусом r.
Як видно з рис. 3.30, швидкість результуючого руху змінюється як за напрямком, так і за величиною. Основна задача механізму оптичної компенсації зсуву зображення полягає в тому, що сумарна швидкість зображення повинна дорівнювати нулю. Це можливо в тому випадку, якщо швидкості Vиз і Vк рівні за абсолютним значенням і спрямовані в протилежні напрямки (рис. 3.31).
У цьому полягає перша умова цього способу ОКЗЗ, яка для двоклинового компенсатора може бути записана так:
![]() , (3.31)
, (3.31)
де Ск – коефіцієнт, що характеризує середнє значення sinωt протягом часу відкриття затвора АФА.
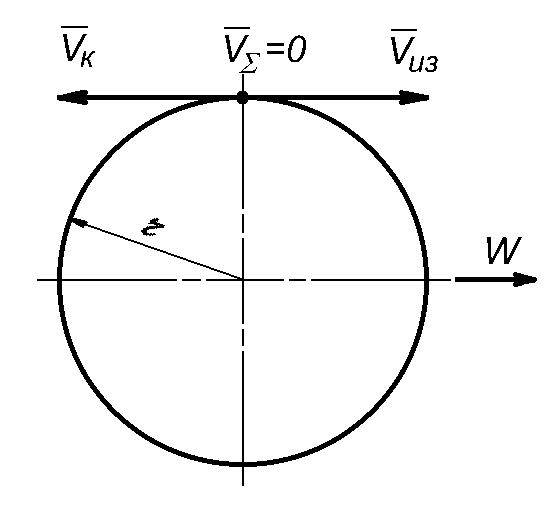
Рис. 3.31. Діаграма співвідношення між векторами швидкості зображення
і швидкості компенсації в момент спрацьовування затвора
При одночасному повороті оптичних клинів (рис. 3.32) у протилежні сторони на кут ωка сумарне відхилення світлового пучка у фокальній площині аерофотоапарата буде змінюватися за наступним законом:
![]() . (3.32)
. (3.32)
Відкіля випливає:
![]() .
(3.33)
.
(3.33)
Момент спрацьовування аерофотозатвора повинен відповідати моменту, коли швидкість компенсації змінюється незначно, що відповідає куту повороту клина
![]() ,
,
а кут взаємного розвороту клинів у цей момент буде дорівнювати π. Тоді формула (3.33) для швидкості Vк у момент компенсації прийме вигляд:
![]() .
(3.34)
.
(3.34)
З урахуванням першої умови ОКЗЗ можна записати
![]() .
(3.35)
.
(3.35)

Рис. 3.32. Діаграма зміни швидкості компенсації при двоклиновому способі компенсації
Друга умова способу ОКЗЗ за допомогою обертових клинів має на увазі строгу погодженість положення клинів з моментом спрацьовування аерофотозатвора. У цьому випадку швидкість обертання клинів повинна бути такою, щоб за час інтервалу T між двома циклами, які слідують один за одним, клини робили одне й те саме ціле число оборотів т для даного коефіцієнта перекриття. Ця умова визначається рівнянням:
ТN = т, (3.36)
або Tω = 2πm.
Після підстановки у формулу (3.36) виразів для Т і N друга умова ОКЗЗ буде характеризуватися залежністю:
![]() .
(3.37)
.
(3.37)
Ця формула є вихідною для визначення параметрів оптичного клина.
При повітряному фотографуванні з декількома коефіцієнтами перекриття необхідно, щоб дотримувалася рівність і сталість відносин
![]() ,
(3.38)
,
(3.38)
або ![]() ,
(3.39)
,
(3.39)
звідки:
![]() .
(3.40)
.
(3.40)
З формули (3.40) видно, що параметри оптичного клина для кожного аерофотоапарата визначаються величиною коефіцієнта ψ. Так, наприклад, якщо ψ = 5, то при k1 = 20% спрацьовування затвора відбувається через кожні 4 обороти клинів, а при k2 = 60% – через кожні 2 обороти.
Оптична компенсація зсуву зображення за допомогою обертових клинів завдяки малій масі рухливих елементів і відсутності впливу на роботу механізму вирівнювання і перемотування плівки, а також відсутності поперечної декомпенсації і хроматизму широко застосовується в сучасних аерофотоапаратах.
Однак наявність значних енергетичних втрат (18...20%) у вузлі ОКЗЗ обмежує застосування таких аерофотоапаратів при фотографуванні ділянок земної поверхні в умовах зниженої освітленості. Це обмеження збільшується ще і тим, що величина залишкового зсуву зображення δост збільшується зі збільшенням tф. Характер зміни значень залишкового зсуву зображення в залежності від швидкості обертання оптичних клинів і фактичної витримки показаний на рис. 3.33.

Рис. 3.33. Графік зміни залишкового зсуву зображення
у залежності від ωкл і tф
З графіків видно, що величина залишкового зсуву зображення різко зростає зі збільшенням ωкл і tф.
До недоліків оптичної компенсації за допомогою двох клинів відноситься необхідність строгої синхронізації моменту спрацьовування затвора з положенням клинів, що забезпечить мінімум відносної помилки компенсації.
Двоклинова компенсація зсуву зображення характеризується значною методичною помилкою, що полягає в нерівномірності компенсації по всьому полю зображення, що знижує ефективність ОКЗЗ в аерофотоапаратах з великим кутом поля зору.
Зменшення ефективності компенсації зі збільшенням кута поля зображення не дозволяє використовувати цей метод у ширококутових системах, що фотографують, так само ефективно, як, метод МКЗЗ. Тому метод ОКЗЗ із двома обертовими клинами застосовується в довгофокусних аерофотоапаратах з великим розміром знімка.