

3. Відображення
Якщо
кожному елементові
![]() множини
множини
![]() відповідає один чи декілька елементів
відповідає один чи декілька елементів
![]() множини
множини
![]() ,
тобто при зміні елементів
певним чином змінюються елементи
,
то говорять, що існує функція,
визначена на множині
,
і пишуть символічно рівність
,
тобто при зміні елементів
певним чином змінюються елементи
,
то говорять, що існує функція,
визначена на множині
,
і пишуть символічно рівність![]()
де
![]() той
елемент множини
,
який відповідає елементові
множини
.
Будь-яке конкретне значення аргументу
той
елемент множини
,
який відповідає елементові
множини
.
Будь-яке конкретне значення аргументу
![]() прийнято також називати прообразом,
а відповідне йому значення функції
прийнято також називати прообразом,
а відповідне йому значення функції
![]() образом.
Отже, кожному елементові множини
відповідає
його образ у множині
(рис.
1.3, а). Замість слова функція
вживають термін відображення
і записують
образом.
Отже, кожному елементові множини
відповідає
його образ у множині
(рис.
1.3, а). Замість слова функція
вживають термін відображення
і записують
![]()
Відображення,
значення яких знаходяться за змінною,
що належить до одної множини, називають
відображеннями
одної
змінної, чи
одномісними,
у випадку двох змінних (аргументів),
відображеннями
двох змінних,
чи двомісними
відображеннями. Областю
визначення
двомісного відображення
![]() є
множини
і
.
У загальному випадку
-місне
відображення застосоване до упорядкованої
системи
аргументів і дає деяке значення за
умови, що впорядкована система аргументів
належить до області визначення
відображення.
є
множини
і
.
У загальному випадку
-місне
відображення застосоване до упорядкованої
системи
аргументів і дає деяке значення за
умови, що впорядкована система аргументів
належить до області визначення
відображення.
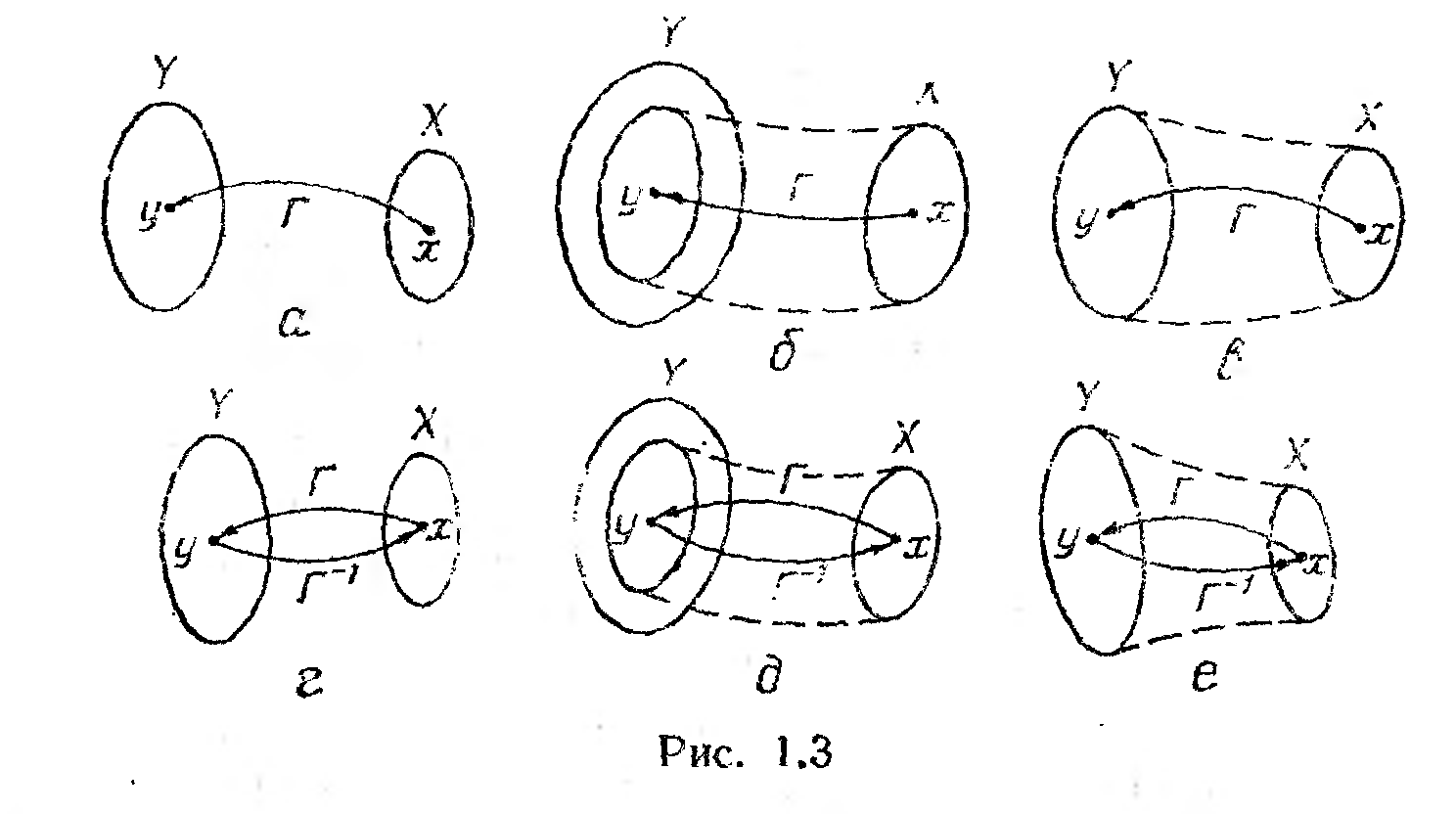
Якщо
відображення
![]() всюди визначене, тобто коли його область
визначення збігається
,
то
називають відображенням
в
(рис.1.3, б). Говорять, що закон
всюди визначене, тобто коли його область
визначення збігається
,
то
називають відображенням
в
(рис.1.3, б). Говорять, що закон
![]() виражає однозначне відображення, чи
відображення множини
в множині
,
і що елемент
виражає однозначне відображення, чи
відображення множини
в множині
,
і що елемент
![]() є образом елемента
є образом елемента
![]() .
.
Якщо образ усієї множини дорівнює , тобто коли кожний елемент є образом хоча б одного елемента ,то говорять, що має місце відображення на . Таке відображення називають сур’єктивним (рис.1.3, в).
У
випадку, коли множини
та
збігаються,
то
є відображенням
в
.
Елемент
,
що задовольняє співвідношення
![]() ,
називається нерухомою
точкою відображення
.
Коли між
і
установлено взаємно однозначну
відповідність, то
називають ін’єктивним
відображенням,
а
,
називається нерухомою
точкою відображення
.
Коли між
і
установлено взаємно однозначну
відповідність, то
називають ін’єктивним
відображенням,
а
![]() обуреним
відображенням
(рис.1.3, г);
якщо ця відповідність визначена всюди,
то
називається ін’єкцією
і
обуреним
відображенням
(рис.1.3, г);
якщо ця відповідність визначена всюди,
то
називається ін’єкцією
і
![]() (рис.1.3,д).
(рис.1.3,д).
Відображення, яке є одночасно сюр’єктивним й ін’єктивним, називають бієктивним відображенням, або бієкцією (рис.1.3, е).
Якщо
![]() відображення
множини
в
,
то при
відображення
множини
в
,
то при
![]() множину
множину![]() називають образом
множини
.
називають образом
множини
.
Якщо
і
![]() відображення
в
,
то композицією
відображення
в
,
то композицією
![]() є відображення. Що визначається як
є відображення. Що визначається як![]()
Відображення
вищих порядків визначаються
у вигляді
![]()
![]()
Традиційним
замиканням
відображення
називають відображення
множини
в
![]()
4. Структурні елементи та фізичні величини електричного кола
Основними
структурними (геометричними) елементами
електричного (зрештою, і магнітного)
кола є
вітки,
що відповідають двополюсникам, з яких
складене
коло,
вузли,
які відповідають точкам сполучення
віток, і
контури
як замкнені окреслення, що проходять
через вузли та вики Символом
![]() позначатимемо кількість віток, символом
позначатимемо кількість віток, символом
![]() – кількість вузлів, символос
– кількість вузлів, символос
![]() – кількість електрично незв'язаних
частин (компонентів) кола.
– кількість електрично незв'язаних
частин (компонентів) кола.
Вузол електричного кола – це точка, в якій збігається не менше трьох струмів. Додатним вважатимемо напрям струмів від вузла Користуватимемося також поняттям елементарний вузол як точкою сполучення двох двополюсників і узагальнених вузлів, як окресленням не менше двох вузлів Замкнена в окресленні узагальненого вузла частина схеми – підсхема – може розглядатися як схема багатополюсника.
Спосіб сполучення віток електричного кола (структуру схеми кола) ображатимемо за допомогою геометричної схеми – графа, вершині якого відповідають вузлам схеми електричного кола, ребра – його віткам.
Для
аналітичного запису структури електричного
кола використовують
матриці інциденцій
![]() та
та
![]() й
матрицю перетинів
й
матрицю перетинів
![]() його графа.
його графа.
У загальному випадку в графі кола відтворюють усі його елементи: джерела ЕРС, джерела струмів, пасивні двополюсники. При цьому джерелам ЕРС звичайно підпорядковують ребра дерева; джерелам струмів – хорди; пасивним двополюсникам – перші та другі. Такий граф називатимемо розширеним. Його ребра позначають символами елементів схеми кола.
Основними фізичними величинами електричного кола є їх параметри. вимушувальні сили (джерела електрорушійних сил – ЕРС і джерела струмів – ДС), струми, напруги, потокозчеплення, заряди, потужності тощо. Фізичні величини, які характеризують електромагнітний процес електричного кола (ЕРС, ДС, струми, напруги, потокозчеплення і т. п.), називають координатами або параметрами режиму. їх також називають змінними стану. Поняття режиму електричного кола (як, зрештою, і ЕЕС) звичайно ототожнюють з поняттям його стану.
Відповідно до поняття координат електричні кола з розширеним графом називають колами в розширеному координатному базисі.
Зв'язки між координатами елементів електричного кола в загальному випадку задають у вигляді нелінійних залежностей, які здебільшого називають їхніми характеристиками (вольт-амперні, вебер-амперні, вольт-кулонові характеристики). Елементи з нелінійними характеристиками називають нелінійними елементами. У випадку лінійних характеристик (лінійні елементи) залежність між їх координатами записується у скінченній формі. Деколи нелінійні характеристики елементів лінеаризують шляхом їх спрямлення у вигляді рівняння прямої, яка проходить через точку початку координат і деяку точку, що лежить на характеристиці. Коефіцієнти таких лінеаризованих рівнянь називають статичними параметрами елемента.
Електричні кола, складені з лінійних елементів, лінійні. Якщо в електричному колі є хоча б один нелінійний елемент, то таке коло нелінійне.
Усі фізичні величини та рівняння електричного кола подаватимемо у символічній формі.
Параметри електричного кола – імпеданси (комплексні опори) та адмітанси (комплексні провідності), а також їх складові – резистанси (активні опори), реактанси (реактивні опори), кондуктанси (активні провідності) та сусцептанси (реактивні провідності) записуватимемо у вигляді відповідних матриць. Розглянемо основні з них.
Для запису вимушувальних сил і координат режиму застосовуватимемо багатовимірні вектори.
Багатовимірний
вектор джерел струмів (ДС) –
–
![]() -вимірний
вектор, складові якого є джерелами
струмів вузлів кола. Якщо ДС спрямоване
від вузла, то при цій координаті вектора
ставитимемо знак «плюс», у протилежному
випадку – «мінус».
-вимірний
вектор, складові якого є джерелами
струмів вузлів кола. Якщо ДС спрямоване
від вузла, то при цій координаті вектора
ставитимемо знак «плюс», у протилежному
випадку – «мінус».
Багатовимірний вектор напруг віток – аналогічний векторові ЕРС віток, координатами якого замість ЕРС виступають напруги віток.
Коли
ведеться аналіз електричного кола на
основі його розширеного графа, то
вектор-стовпець
![]() відповідає
напругам пасивних елементів і ДС.
відповідає
напругам пасивних елементів і ДС.
Багатовимірний вектор струмів віток – аналогічний векторові наруг віток.
Коли ведеться аналіз на основі розширеного графа, то вектори струмів віток і струмів ДС (як віток) об'єднуються в один вектор
Багатовимірний вектор потужностей має компоненти, які дорівнюють добуткові комплексів напруг віток на спряжені комплекси їх струмів. Багатовимірний вектор потужностей визначається як добуток діагональної матриці від вектора комплексів напруг віток на вектор спряжених комплексів струмів віток.
Багатовимірний
вектор-стовпець потужностей віток
кола![]() багатовимірний
вектор-стовпець потужностей ДС
багатовимірний
вектор-стовпець потужностей ДС
![]() багатовимірний
вектор-стовпець втрат потужностей у
вітках кола
багатовимірний
вектор-стовпець втрат потужностей у
вітках кола![]()