

Шпаргалка ТАУ
.pdf1
Тема І. Загальні відомості про керування і системи автоматичного керування
1.Основні поняття про автоматичне керування і структура систем автоматичного керування.
2.Фундаментальні принципи керування.
3.Основні закони регулювання.
4.Класифікація систем автоматичного керування.
5.Загальна характеристика процесів САК.
6.Загальна функціональна схема системи автоматичного керування.
7.Класифікація елементів САК.
1. Основні поняття про автоматичне керування.
Керування – це така організація того чи іншого процесу, яка забезпечує досягнення визначеної цілі. Керування яким не-будь об’єктом це дія на нього з метою забезпечення руху процесу в об’єкті, або необхідної зміни його стану.
В загальному випадку є два види обмеження на процес керування. Обмеження першого виду – це самі закони природи у відповідності з якими проходить рух системи керування. При математичному формулюванні задачі керування ці обмеження подаються алгебраїчними, диференціальними або різницевими рівняннями об’єкта керування. Другий вид обмежень викликаний обмеженістю ресурсів, які використовуються при керуванні. Математичне обмеження цього виду подаються у вигляді алгебраїчних рівнянь або нерівностей, які зв’язують змінні, що описують стан системи керування.
Фізичну систему, процесами в якій ми керуємо, будемо називати об’єктом керування.
Об’єкти керування можуть бути самими різноманітними
імати різну фізичну природу. Це можуть бути:
1)технічні пристрої (верстат, авто, літак);
2)виробничі підприємства (відділ, цехи, завод, галузь підприємства);
3)економічні системи (економіка підприємства, економіка держав);
4)біологічні системи;
5)соціальні системи.
Та обставина, що закономірності, яким підпорядковуються процеси керування, є спільними для об’єктів керування любої фізичної природи, дозволяють розглянути спільну структуру і дати спільний математичний опис процесу керування.
Як вказано вище, об’єкт може належати як до неживої природи (технічні пристрої), так і до живої природи.
Саме керування може здійснюватись як людиною (пілот керує літаком), так і технічним пристроєм (автопілот в літаку). Загальна теорія керування, яка охоплює живу і неживу природу, є предметом науки кібернетики.
Керування, яке здійснюється без участі людини називається автоматичним керуванням. Предметом даного курсу є теорія автоматичного керування технічними пристроями (частина кібернетики).
Технічний пристрій, з допомогою якого здійснюється автоматичне керування, називається керуючим пристроєм. Сукупність об’єкта керування і керуючого пристрою називається системою автоматичного керування (САК).
В загальному вигляді система автоматичного керування представлена на рис.1, де КП – керуючий пристрій, О – об’єкт керування.
Стан об’єкта характеризується вихідною (або керованою) величиною Y. Від керуючого пристрою на вхід об’єкта подається керуюча дія U. Крім керуючої дії до об’єкта поступає також збурення (збурюючи дія) f, яка змінює стан об’єкта (Y0), перешкоджаючи керуванню. На вхід керуючого пристрою подається задаюча дія Х3, яка містить інформацію про необхідне значення Х, тобто про мету (ціль) керування. Змінні Х3, U і f в загальному випадку є векторними величинами.
Як видно з рис.1, в самому загальному випадку на вхід керуючого пристрою, крім задаючої дії, поступає також інформація про поточний стан об’єкта (в вигляді вихідної величини) і про діюче на об’єкт збурення f. Керуючий пристрій переробляє одержану інформацію по визначеному алгоритму (закону). В результаті, на його виході виникає керуюча дія U.
Розглянемо функціональну схему САК, на якій показано основні складові частини керуючого пристрою:чутливий пристрій ЧП, обчислювальний пристрій ОП і виконавчий пристрій ВП.
Рисунок 2.
Чутливий пристрій (вимірні пристрої, давачі) призначений для вимірювання подаваємих на керуючий пристрій дій (сигналів) Х, Хз,f.
Обчислювальний пристрій реалізує алгоритм роботи керуючого пристрою. В найпростішому випадку цей пристрій здійснює прості математичні операції, такі як операція порівняння, яка визначає різницю Х-Хз, операції інтегрування, диференціювання, статичного нелінійного перетворення і т.д. В більш складних випадках обчислювальний пристрій може являти собою цифрову обчислювальну машину і навіть комплекс машин.
Виконавчий пристрій призначений для безпосереднього керування об’єктом, тобто зміни його стану у відповідності з сигналом, який видає обчислювальний пристрій.
Крім вказаних вище частин, в склад керуючого пристрою можуть входити спеціальні пристрої, наприклад перетворювачі (які служать для узгодження окремих частин системи), пристрої зв’язку і т.п.
Фундаментальні принципи керування.
Втехніці існує три фундаментальні принципи керування: принцип розімкнутого керування, принцип компенсації (керування по збуренню) і принцип зворотного зв’язку (керування по відхиленню).
1. Принцип розімкнутого керування.
Врозімкнутих САК вихідна величина об’єкта Y не вимірюється, тобто немає контролю за станом об’єкта керування і відсутній зворотній зв’язок між виходом об’єкта
івходом керуючого пристрою

2
.
Прикладом є розімкнута система програмного керування напругою синхронного генератора.
Об’єктом керування є синхронний генератор (Г), напруга генератора – вихідна величина, обмотка збурення і пристрій задання графіка напруги (ПЗГ) – керуючий пристрій. Напруга збудження автоматично змінюється в часі у відповідності із закладеною в ПУГ програмою і забезпечує відповідну зміну напруги генератора. В такій системі керування напруга може значно відрізнятись від заданої наприклад, в результаті зміни навантаження генератора, швидкості обертів двигуна, температури обмоток генератора.
2. Принцип компенсації (керування по збуренню). Вимірюються збурення і вводяться по результатах вимірювання корективи в алгоритм керування, які компенсують відхилення, викликані збуреннями.
3. Принцип зворотного зв’язку (керування по відхиленню). В таких системах корективи в алгоритм керування вводяться по фактичному значенню вихідної величини. Системи в яких використовують керування по відхиленню називаються замкнутими.
Вимірюючий пристрій порівнює напруги UЗ і U і подає на підсилювач (виконавчий пристрій) різницю U=UЗ–U.
В таких системах керуючий пристрій прагне ліквідувати всі відхилення Y від значення визначеного для Хз, незалежно від причин, що викликали ці відхилення. Ці системи можуть забезпечити практично необмежену точність керування і є основним типом САК.
Також існують комбіновані САК (керування по збуренню і відхиленню):
Системи автоматичного регулювання – системи стабілізації, системи програмного керування і слідкуючі системи.
Системою автоматичного регулювання (САР) називається САК, яка підтримує вихідну величину Х на заданому рівні Хз, тобто підтримує виконання умови Х=Хз.
Системи стабілізації. Система автоматичного регулювання, яка підтримує постійною вихідну (керовану) величину, називається системою стабілізації. Задаюча дія в такій системі Хз=const. Прикладами можуть бути генератори постійного струму, змінного струму U=const, двигун n=const.
Системи програмного керування – це системи, в яких керована величина змінюється в часі по визначеному, наперед заданому закону, що вводиться в систему з допомогою програмного задаючого пристрою. На практиці використовують два види систем програмного керування: 1- системи з часовою програмою і 2- системи з просторовою програмою. В системах з часовою програмою програма виробляє безпосередньо функцію Хз. Системи з просторовою програмою використовують, наприклад, в програмному керуванні верстатом при створенні деталі по шаблону.
Цей спосіб полягає в тому, що задана траєкторія описується з допомогою систем параметричних рівнянь, в яких параметром є час, а після цього використовуються пристрої, що реалізують рух приводу в відповідності з рівняннями.
Слідкуючі системи. В слідкуючих системах керуючі дії є функціями часу, які наперед невизначені.
Системи прямого і непрямого регулювання.
Системами прямого регулювання називаються системи, в яких енергія для зміни стану регулюючого органу поступає безпосередньо через регульовану величину.
Системами непрямого регулювання називають такі системи, в яких енергія для функціонування регулятора надходить із додаткових джерел.
Системи неперервної і дискретної дії.
Системою неперервної дії називається така система, в кожній ланці якої неперервній зміні вхідної величини відповідає неперервні зміна вихідної величини.
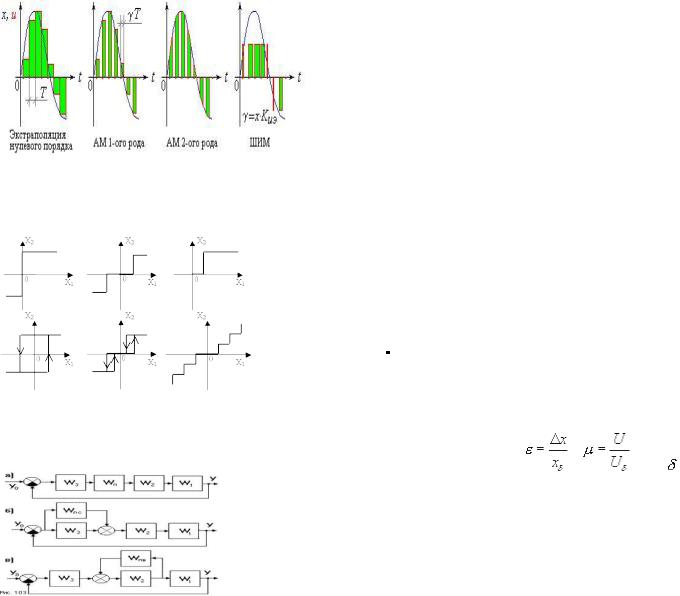
Системою дискретної дії називається така система, в якій хоча б в одній ланці при неперервній зміні вхідної величини вихідна величина змінюється стрибком або є послідовністю імпульсів або цифровим кодом.
До дискретних систем відносять імпульсні системи, цифрові системи, релейні системи.
3
Імпульсні системи це системи, в яких неперервний сигнал перетворюється в послідовність імпульсів.
Цифрові системи це системи, в яких сигнал генерується ЕОМ або цифровими пристроями у вигляді кодів.
Релейною системою називається система, в якій хоча б в одній ланці при неперервній зміні вхідної величини вихідна величина змінюється стрибком.
Одно контурні і багато контурні системи.
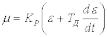
Система, яка має один зворотній зв’язок (головний) називається одно контурною (а).
Система, яка має крім головного зворотного зв’язку ряд додаткових, називається багато контурною (б,в).
Одномірні і багатомірні системи.
Одномірною називається система керування однією величиною в об’єкті керування.
Система керування декількома величинами в спільному об’єкті керування називається багатомірною.
Багатомірна система незв’язаного керування має декілька керуючих пристроїв, кожний із яких здійснює керування своєї вихідної координати об’єкта. При цьому всі ці пристрої не мають взаємозв’язків. В системі зв’язного керування окремі керуючі пристрої зв’язані між собою зовнішніми зв’язками.
Система називається автономною, якщо керована нею вихідна величина не залежить від значень інших вихідних величин.
Лінійні і нелінійні САК.
Лінійною називається система, яка описується лінійними алгебраїчними або диференціальними рівняннями. Нелінійна система – це система, в складі якої є хоча б одна нелінійна ланка, тобто ланка що описується нелінійними рівняннями.
Для лінійних систем справедливим є принцип суперпозицій. Завдяки цьому принципу розроблена загальна теорія лінійних САК. До нелінійних систем принцип суперпозицій непридатний. Немає і загальної теорії нелінійних САК, а є тільки ряд числових методів.
Проблеми дослідження нелінійних систем заставляють спрощувати їх опис. Спрощенням є наближений опис нелінійних систем лінійними рівняннями, хоча б в деяких режимах, – тобто лінеаризація нелінійних систем. У випадках, коли лінеаризація неможлива, використовують наближені методи дослідження нелінійних систем, з врахуванням їх не лінійності.
Стаціонарні і нестаціонарні САК.
Стаціонарними називаються системи, всі параметри яких не змінюються із часом.
Нестаціонарні системи – це системи із змінними параметрами. Коефіцієнти рівнянь, що описують такі системи, є функціями часу.
Адаптивні і не адаптивні системи.
Адаптивні системи мають властивість пристосовуватись до змін зовнішніх умов роботи, а також покращувати свою роботу по мірі нагромадження досвіду.
Не адаптивні, або звичайні, системи властивості адаптації не мають.
Основні закони регулювання
Законом регулюванняназивають математичну залежність, в відповідності з якою керуюча дія на об’єкт вироблялася би безінерційним керуючим пристроєм.
При описі законів найбільш зручно використовувати
безрозмірні відносні змінні |
і |
, де х |
і U |
 – базові значення.
– базові значення.
Пропорційний закон (позначається П):  , де КР – коефіцієнт передачі регулятора, а 1/ КР – статизм регулятора.
, де КР – коефіцієнт передачі регулятора, а 1/ КР – статизм регулятора.
Інтегральний закон (позначається І):  , або
, або
 , де Т – постійна часу інтегрування. Інтегральний регулятор – астатичний. Забезпечує одне і те ж значення величини що регулюється при довільних навантаженнях.
, де Т – постійна часу інтегрування. Інтегральний регулятор – астатичний. Забезпечує одне і те ж значення величини що регулюється при довільних навантаженнях.
???????????????
Пропорційно-інтегральний закон (ПІ):
 . Інколи цей закон називають «пропорційний закон з інтегральною кореляцією». ПІрегулятор забезпечує астатичне регулювання. Це видно із
. Інколи цей закон називають «пропорційний закон з інтегральною кореляцією». ПІрегулятор забезпечує астатичне регулювання. Це видно із
виразу  . Пропорційно-диференціальний закон (ПД):
. Пропорційно-диференціальний закон (ПД):
 .
.
Пропорційно-інтегрально-диференціальний закон (ПІД):
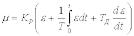 .
.
Ті і ТД – відповідно постійні часу інтегрування і диференціювання. ПІД-регулятор забезпечує астатичне
4
регулювання.  вводять для покращення якості процесу регулювання.
вводять для покращення якості процесу регулювання.
Класифікація систем керування.
У відповідності із вищевикладеним, САК по різних ознаках можуть бути поділені на наступні категорії:
1) по принципукерування:
–принцип розімкнутого керування;
–керування по збуренню (компенсація);
–керування по відхиленню (зворотній зв’язок);
–комбіноване керування;
2)по призначенню:
–стабілізації;
–програмні;
–слідкуючі;
3)по виду енергоспоживання регулюючого пристрою:
– прямого регулювання;
– непрямого регулювання;
4)по формі регулюючого сигналу в часі:
–неперервні;
–дискретні (імпульсні, цифрові, релейні); 5) по кількості зворотних зв’язків:
–одноконтурні;
–багатоконтурні;
6)по кількості параметрів, що регулюються:
– дномірні;
– багатомірні;
7)по функціональних зв’язках вхідних і вихідних величин:
– лінійні (лінеаризовані);
– нелінійні (суттєво нелінійні);
8)по виду закону регулювання:
–статичні (пропорційні);
–астатичні (інтегровані);
–ізодромні (пропорційно-інтегральні);
–пропорційно-диференціюючі;
–пропорційно-інтегрально-диференціюючі і ін.
Загальні характеристики процесів САК.
Як і у всіх динамічних систем, процеси САК поділяються на усталені і перехідні. До моменту початку перехідного процесу і по закінченню цього процесу, в системі має місце усталений процес, який характеризується зовнішнім збуренням і іншими умовами роботи системи.
При розгляді процесів САК важливе значення мають такі поняття: стійкість системи, якість перехідного процесу керування і точність керування.
Стійкість – це властивість системи повертатись в усталений стан після того, як вона була виведена з цього стану будь-яким збуренням.
Якість перехідного процесу характеризується тим, наскільки процес керування близький до бажаного. Кількісно якість перехідного процесу визначається критеріями якості, які вибирають у відповідності з метою керування (для генератора критерієм може бути величина максимального відхилення напруги генератора).
Точність керування характеризується похибкою системи в усталених режимах (для генератора – відхилення усталеної напруги від заданої після закінчення перехідного процесу).
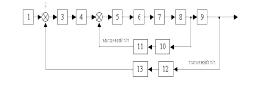
Загальна функціональна схема системи автоматичного керування.
1 – задаючий елемент, який виробляє необхідний сигнал;
2 – елемент порівняння;
3,7 – підсилюючо-перетворюючі елементи, що підсилюють і перетворюють сигнал за рахунок допоміжного джерела енергії до величини, достатньої і зручної для роботи наступного елементу;
4 – коректуючий елемент, що використовується для покращення динамічних властивостей системи, або для реалізації необхідного закону керування;
8 – виконавчий елемент, що забезпечує зміну керуючої координати за рахунок керуючої дії, що прикладається до об’єкта;
9– об’єкт керування – будь-який об’єкт (парові і гідравлічні турбіни, двигуни, генератори, спеціальні пристрої, авто, літаки, морські судна, керовані ракети і т.д.);
10– паралельний керуючий елемент;
5,6,11,13 – допоміжні елементи, що використовуються при переході від неперервних систем до імпульсних або цифрових: 5—ЦАП; 6 – імпульсний елемент; 11,13 –АЦП.
В функціональній схемі неперервної системи допоміжні елементи 5, 6, 11, 13 відсутні. При переході від неперервного способу керування до перервного, вводиться імпульсний елемент 6, який служить для перетворення неперервного сигналу в послідовність імпульсів, модульованих по одному із параметрів (амплітуда, частота, час).
Якщо в структурну схему ввести цифровий обчислювальний пристрій ЦОП або ЕОМ, то система називається цифровою системою автоматичного керування.
ЦОП або ЕОМ можуть виконувати функції задаючого елементу, елементу порівняння, коректую чого елементу і елементу підсилення. Крім того ЕОМ може виконувати різні обчислювальні операції.
Класифікація елементів систем автоматичного керування.
–по функціональному призначенню елементів: вимірювально-перетворювальні; задаючі; елементи порівняння; підсилювально-перетворювальні; виконавчі; коректуючи; допоміжні (логічні, імпульсні, комутаційні, зберігаючі);
–по виду рівнянь елементів: лінійні; лінеаризовані; нелінійні;
–по характери зміни вихідної величини: неперервні; імпульсні; цифрові; релейні;
–по фізичному принципу дії: електричні; магнітні; теплові; механічні; оптичні;
–по роду енергії: електричні; гідравлічні; пневматичні; механічні; комбіновані;
–по способу розпізнавання знаку (фази) вхідного сигналу: реверсивні;нереверсивні;
–по наявності допоміжних джерел енергії: пасивні; активні.

5
Тема ІІ. Математичний опис лінійних систем
1.Постановка задачі. Розбивання системи на ланки.
2.Основні властивості перетворення Лапласа.
3.Форми запису лінійних диференціальних рівнянь.
4.Передавальна функція.
5.Стандартна форма запису лінійних диференціальних рівнянь.
6.Рівняння ланок. Лінеаризація рівнянь.
7.Перехідні (часові) характеристики.
8.Частотні характеристики, частотні функції.
9.Логарифмічні частотні характеристики.
1. Постановка задачі. Розбиття системи на ланки.
Метою розгляду систем автоматичного керування може бути розв’язок однієї із двох задач: задачі аналізу системи або задачі синтезу.
Впершому випадку дається система і значення її параметрів і ставиться задача визначення властивостей системи.
Вдругому випадку навпаки – по заданим властивостям, що повинна мати система, необхідно створити відповідну систему.
Взагальному випадку порядок дослідження САК в обох випадках включає в себе математичний опис системи, дослідження її усталених режимів і дослідження перехідних режимів.
Математичний опис системи починається з розбивання системи на ланки і опису цих ланок. По рівняннях або характеристиках окремих ланок складають рівняння або характеристики системи в цілому, на основі яких і досліджується система.
В функціональній схемі система розбита на ланки, виходячи із функцій, що виконують ланки, тобто виходячи з призначення.
Для математичного опису систему розбивають на можливо більш прості ланки, враховуючи, що ланки повинні мати направленість. Ланкою направленої дії називається ланка, яка передає дію тільки в одному напрямку, – з входу на вихід, і така ланка не має впливу на стан попередньої ланки.
В результаті поділу САК на ланки направленої дії і одержання математичного опису ланок складають структурну схему системи.
Структурна схема складається з прямокутників, що зображають ланки системи, і стрілок, які з’єднують входи і виходи ланок. Стрілками позначають також зовнішні дії, які прикладено до окремих ланок. Кожній ланці структурної схеми ставиться у відповідність рівняння або характеристика, що описує відповідну ланку.
Для прикладу розглянемо розбиття на ланки системи автоматичного регулювання напруги синхронного генератора.
ПН – підсилювач напруги;
ПП – підсилювач потужності;
ВН – вимірювач напруги;
Г – генератор;
Рг – збурення у вигляді зміни навантаження на затискачах генератора;
 – елемент порівняння (умовне позначення), тобто сумуючий елемент, який визначає різницю
– елемент порівняння (умовне позначення), тобто сумуючий елемент, який визначає різницю  .
.
2. Основні властивості перетворення Лапласа.
Перетворенням Лапласа називається співвідношення
,
яке функції  дійсної змінної t ставить у відповідність функцію
дійсної змінної t ставить у відповідність функцію  комплексної змінноїs,
комплексної змінноїs,
. При цьому  називають оригіналом, а
називають оригіналом, а
 – зображенням або зображенням по Лапласу і позначають
– зображенням або зображенням по Лапласу і позначають
 , або
, або  , де L – оператор Лапласа.
, де L – оператор Лапласа.
6
Функція  повинна мати такі властивості:
повинна мати такі властивості:  визначена і кусочно-деференційована на всій додатковій
визначена і кусочно-деференційована на всій додатковій
числовій півосі [0;  ];
];  =0, при t<0; існують такі
=0, при t<0; існують такі
додатні числа М і с, що  при
при  . Функції, які мають вказані властивості, називають функціями оригіналами.
. Функції, які мають вказані властивості, називають функціями оригіналами.
Співвідношення
 ,
,
яке визначає по відомому зображенню його оригінал, називається зворотнім перетворенням Лапласа. В ньому оригінал береться вздовж любої прямої.
Символічно зворотне перетворення Лапласа можна записати як
,
де  – зворотній оператор Лапласа.
– зворотній оператор Лапласа.
Основні властивості перетворення Лапласа.
1. Властивість лінійності:
.
2. Диференціювання оригіналу:
 ,
,
де  ,
,  .
.
.
де  ,
,  .
.
Якщо початкові умови нульові
 ,
,
то: |
. |
3. Інтегруванні оригіналу |
. |
4. Теорема запізнення: |
|
|
. |
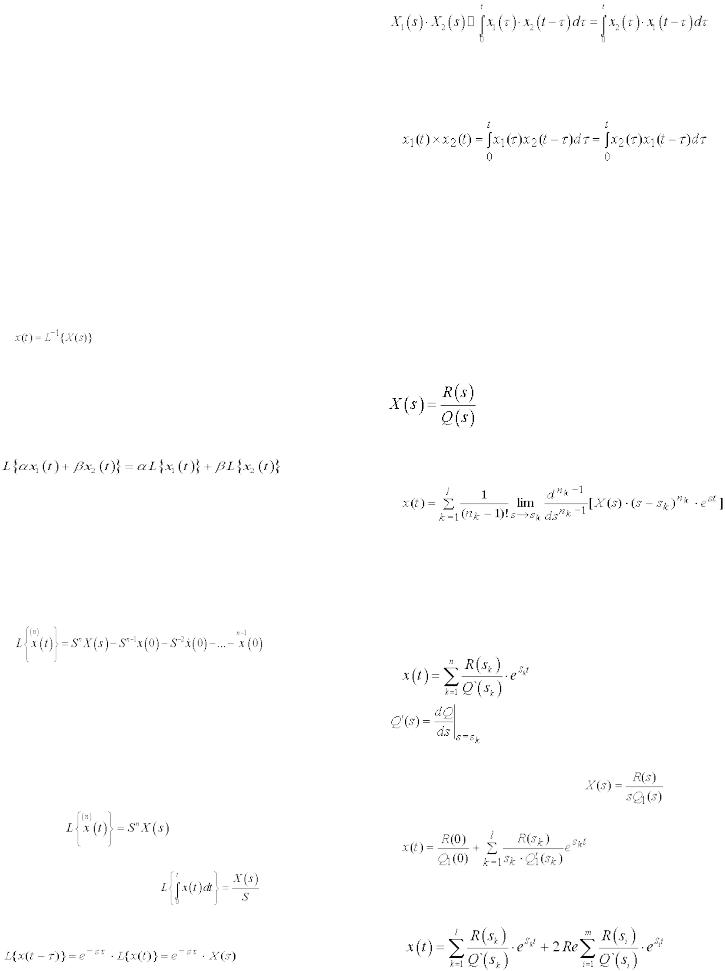
5. Теорема про згортку (теорема множення зображень):
.
Інтеграл в правій частині називають згорткою функцій x1(t) і x2(t) і позначають x1(t)×x2(t):
.
6. Теорема про граничні значення:
 ,
,
а якщо існує границя  , то
, то
 .
.
7. Теорема розкладу. Якщо функція має вигляд
і степінь полінома чисельника R(s) менше степені Q(s), то оригіналом є помножена на 1(t) функція (теорія лишок (теория вычетов)):
,
де  – корені рівнянняQ(s)=0, а nk – їх кратність і l – число різних коренів.
– корені рівнянняQ(s)=0, а nk – їх кратність і l – число різних коренів.
Якщо всі корені прості, то формула має вигляд:
, де n – степінь полінома Q(s),
.
Якщо є нульовий корінь, тобто |
, то |
.
Якщо є дійсні і комплексні корені, то
.

7
8.Для одиничної сходинкової дії x(t)=1(t),  .
.
9.Для одиничного імпульсу (дельта функція)
 ,
,  .
.
3. Форми запису лінійних диференціальних рівнянь.
Розглянемо лінійне диференціальне рівняння
(1)
Введемо для операції диференціювання позначення
; |
. |
Тоді
або
.
Позначимо  ,
,
 ,
,  .
.
Тоді  ,
,
де Q(p) – власний оператор; R1(p) і R2(p) – оператори дії.
4. Передаточні функції.
Відношення оператора дії до власного оператора називають передаточною функцією або передаточною функцією в операторній формі.
Система (1) характеризується двома передавальними функціями:
– передавальною функцією W1(p) по вхідній величині х:
,
– пере давальною функцією W2(p) по вхідній величині f(по збуренню):
, або
 .
.
Це більш компактна форма запису рівняння (1).
Передаточною функцією або передаточною функцією у формі зображення Лапласа називають відношенням зображення вихідної величини до зображення вхідної величини при нульових початкових умовах.
Зображення рівняння (1)
.
Передавальна функція
.
Запишемо:
,
,
.
5. Стандартна форма запису лінійних диференціальних рівнянь.
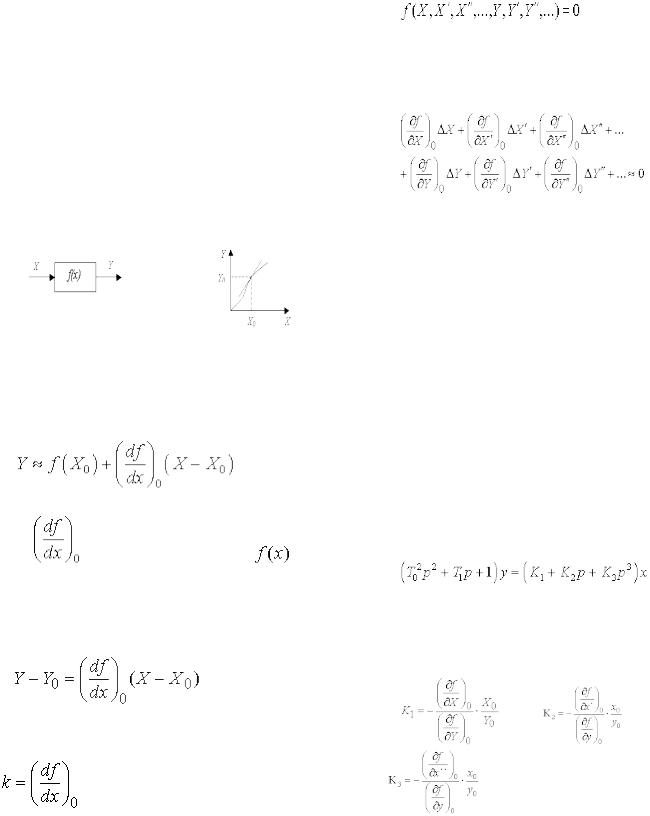
В стандартній формі члени, які містять вихідну величину і її похідні, записують в лівій частині, а всі інші члени – в правій. Коефіцієнт при вихідній величині роблять рівним одиниці.
Тоді рівняння (1) в стандартній формі має вигляд
 ,
,
де |
, |
, |
, |
, |
. |
Постійні Т0, Т1, Т2 – мають розмірність часу і називають постійними часу, а k1 і k2–передаточними коефіцієнтами.
В символічній формі рівняння (1) має вигляд
 .
.
8
6. Рівняння ланок. Лінеаризація рівнянь.
При виводі рівнянь ланок, основна складність полягає в тому, що необхідно встановити допустиму степінь ідеалізації і спрощення ланок.
Головним спрощенням, до якого необхідно прагнути при виводі рівнянь ланок систем, є їх лінеаризація, тобто опис лінійними диференціальними рівняннями.
Лінеаризація нелінійності, що є в рівнянні ланки, полягає в заміні цієї нелінійності наближеною лінійною залежністю.
Розглянемо ланку, що описується нелінійною статичною
залежністю  . Нехай усталений режим відповідає значенням вхідної і вихідної величини X0і Y0 і відхилення Х від X0 в процесі роботи достатньо малі.
. Нехай усталений режим відповідає значенням вхідної і вихідної величини X0і Y0 і відхилення Х від X0 в процесі роботи достатньо малі.
В цьому випадку нелінійну залежність  можна розкласти в ряд Тейлора в околі точки усталеного режиму і, відкинувши члени ряду вище першого порядку малості, одержати наближену залежність:
можна розкласти в ряд Тейлора в околі точки усталеного режиму і, відкинувши члени ряду вище першого порядку малості, одержати наближену залежність:
|
, |
|
де |
– значення похідної функції |
по х |
при х=х0. |
|
|
Це рівняння можна переписати в такому кінцевому вигляді
, або  ,
,
де  ,
,  ,
,
.
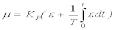
Графічна інтерпретація лінеаризації – це заміна нелінійної характеристики дотичною до неї в точці, що відповідає усталеному режиму. Коефіцієнт k в рівнянні
рівний тангенсу кута нахилу цієї дотичної до осі абсцис
 .
.
Розглянемо більш загальний випадок, коли ланка описується нелінійним рівнянням виду
.
Розкладемо нелінійну функцію в ряд Тейлора в точці усталеного режиму і одержимо лінійне диференціальне рівняння для приростів змінних:
, (1)
де  ,
,  і т.д. – значення похідних функції f, що одержують при підстановці значень X0і Y0 і нульових значень похідних, що відповідають усталеному режиму.
і т.д. – значення похідних функції f, що одержують при підстановці значень X0і Y0 і нульових значень похідних, що відповідають усталеному режиму.
Одержані рівняння є лінійними диференціальними рівняннями в відношеннях, або в варіаціях.
Дві умови лінеаризації:
–лінеаризація можлива тільки при малих відхиленнях;
–лінеаризація можлива тільки для неперервнодиференційованих нелінійностей.
Нелінійні ланки, які не підлягають цим вимогам називають суттєво нелінійними.
Запишемо рівняння ланки у вигляді
,
де  – символ диференціювання,
– символ диференціювання,  ,
,  – прирости змінних у відносних одиницях.
– прирости змінних у відносних одиницях.
, |
, |
– коефіцієнти передачі.
9
, |
– постійні часу. |
Особливостями цієї форми запису є наступне:
1)вихідна величина і її похідні – в лівій частині рівняння, а вхідна величина і її похідні – в правій частині;
2)коефіцієнт при прирості вихідної величини рівний 1;
3)прирости змінних виражені в відносних одиницях.
Правда, інколи зручно використовувати абсолютні значення приростів змінних, в цьому випадку змінюються коефіцієнти передачі. Коефіцієнти лівої частини – постійні часу – лишаються без змін. Їх розмірність – секунда в степені, що рівна порядку похідної, перед якою стоїть даний коефіцієнт.
Друга форма запису лінійних рівнянь – передаточна функція.
, ,
,
де |
– передавальна |
функція. |
|
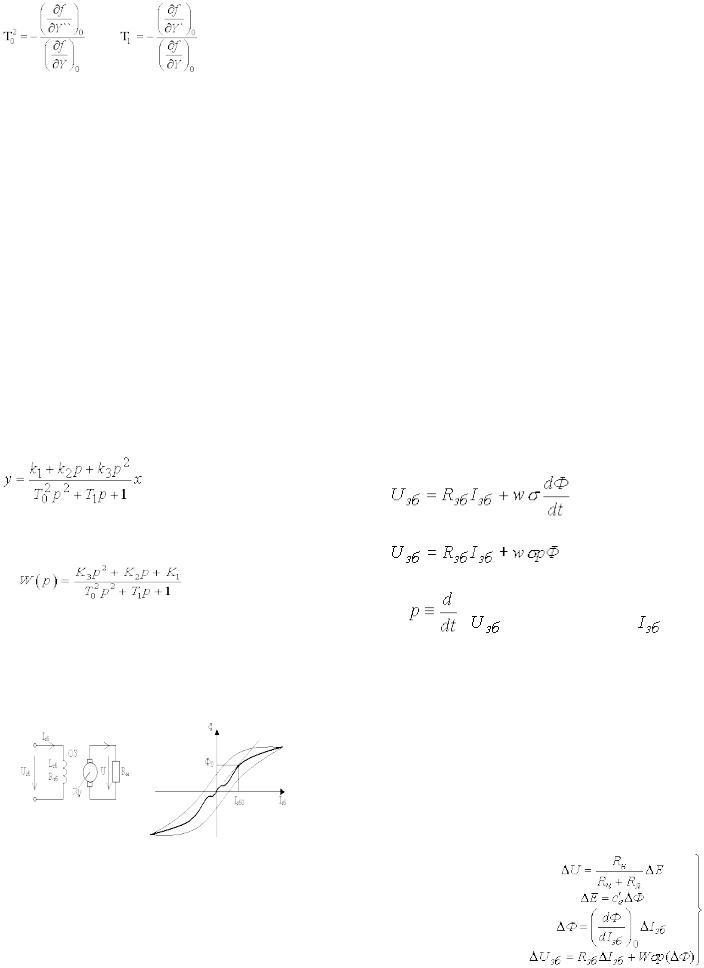
Розглянемо приклад лінеаризації рівняння генератора постійного струму незалежного збудження, який в системі керування може використовуватись в якості підсилювача потужності.
Вхідна величина генератора – Uзб, а вихідна – U. Нехай
 і опір навантаження R постійні. Реакція якоря скомпенсована і не враховується.
і опір навантаження R постійні. Реакція якоря скомпенсована і не враховується.
Напруга генератора
 ,
,
де  – е.р.с. генератора,
– е.р.с. генератора,  – опір кола якоря генератора,
– опір кола якоря генератора,  – опір навантаження.
– опір навантаження.
 ,
,
де п – швидкість обертання якоря, Ф – магнітний потік обмотки збудження, що пронизує обмотку якоря, се – коефіцієнт е.р.с., сталий для даної машини.
Так як n=const, то
 , де
, де  .
.
Потік струму збудження
 .
.
Ця залежність є нелінійною і показана на рисунку.
Струм збудження залежить від напруги збудження
|
|
, або |
|
|
|
, |
|
де |
, |
– напруга збудження, |
– струм |
збудження,  – опір кола збудження,
– опір кола збудження,  – кількість
– кількість
витків обмотки збудження,  – коефіцієнт розсіювання магнітного потоку, з допомогою якого повний потік,
– коефіцієнт розсіювання магнітного потоку, з допомогою якого повний потік,
створений обмоткою збудження рівний  (
(  ).
).
Провести лінеаризацію нелінійності  можна тільки в тому випадку, якщо знехтувати гістерезисом, тобто обмежитись тільки основною кривою намагнічування.
можна тільки в тому випадку, якщо знехтувати гістерезисом, тобто обмежитись тільки основною кривою намагнічування.
Тоді, переходячи до приростів змінних, одержимо таку
систему лінійних рівнянь:

10
де визначається як тангенс кута нахилу дотичної до основної кривої намагнічування в точці усталеного режиму.
Якщо виключити проміжні змінні  ,
,  і
і
 , то одержимо
, то одержимо
,
де  – постійна часу кола збудження:
– постійна часу кола збудження:
;
 – коефіцієнт передачі генератора по збудженню:
– коефіцієнт передачі генератора по збудженню:
.
 і
і  залежать від вибраної точки усталеного режиму.
залежать від вибраної точки усталеного режиму.
Якщо перейти до відносних одиниць, то рівняння набуде вигляду
,
де |
, |
|
, |
|
|
. |
|
Тоді |
|
, де |
і |
структурна схема має вигляд
Якщо врахувати, що швидкість непостійна, то
 .Розкладемо в ряд Тейлора дане рівняння і одержимо лінійне рівняння для просторів змінних:
.Розкладемо в ряд Тейлора дане рівняння і одержимо лінійне рівняння для просторів змінних:
,
де  ,
,  .
.
Підставимо отримане рівняння в систему (1), замість рівняння  і отримуємо:
і отримуємо:
,
де |
. |
Якщо перейти до відносних одиниць, то отримаємо:
,
де |
, |
, або |
,
де  – передавальна функція генератора по швидкості обертів якоря;
– передавальна функція генератора по швидкості обертів якоря;
 – передавальна функція генератора по напрузі збудження.
– передавальна функція генератора по напрузі збудження.
7. Перехідні (часові), частотні характеристики
Динамічні властивості лінійних ланок і систем автоматичного керування в цілому можуть бути описані рівняннями і графічними характеристиками. В ТАУ розглядають два типи таких характеристик – перехідні (або часові) і частотні.
Ці характеристики можуть бути досліджені експериментально або побудовані по рівнянням ланок. Є і зворотна можливість – по експериментально одержаним характеристикам скласти рівняння ланки.
Крім того, з допомогою характеристик можна визначити реакцію ланки на будь-яке збурення довільного вигляду.