

4.6. Реальные связи. Трение скольжения и его законы
Если связь идеальная (связь без трения), то ее реакция направлена по нормали к поверхности или к кривой, ограничивающей свободу движения тела (рис. 4.13).
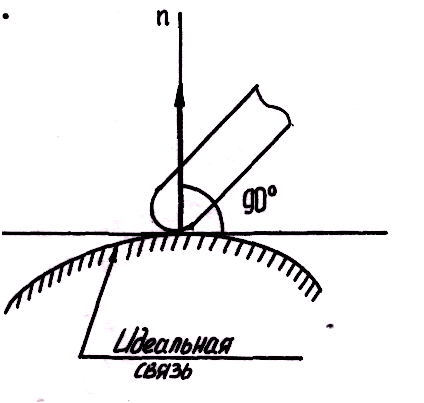
Рис. 4.13. Идеальная связь
Если же тело опирается на поверхность реальной связи (связь с трением), то ее реакция отклоняется от нормали на некоторый угол φ (рис. 4.14).
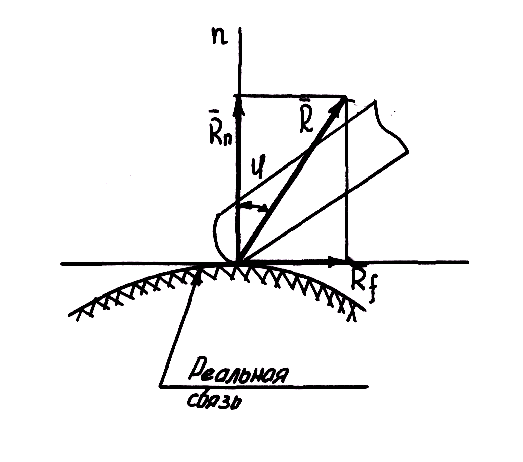
Рис. 4.14. Реальная связь
Таким
образом, реакцию реальной связи можно
рассматривать как геометрическую сумму
составляющих – нормальной
![]() и касательной
и касательной![]() ,
которая и есть известная из физики сила
трения.
,
которая и есть известная из физики сила
трения.
![]() будет максимальной
при
будет максимальной
при
![]() .
Угол
.
Угол![]() – максимальный угол, на который от
нормали к поверхности реальной связи
отклоняется ее реакция, называетсяуглом
трения:
– максимальный угол, на который от
нормали к поверхности реальной связи
отклоняется ее реакция, называетсяуглом
трения:
![]()
где
![]() – статическая сила трения или сила
трения покоя.
– статическая сила трения или сила
трения покоя.
Постоянное
для двух соприкасающихся тел значение
![]() называется
статическим
коэффициентом трения
(значения коэффициентов трения приводятся
в различных физических или технических
справочниках) или коэффициентом
трения покоя.
называется
статическим
коэффициентом трения
(значения коэффициентов трения приводятся
в различных физических или технических
справочниках) или коэффициентом
трения покоя.
Основные законы трения
1. Сила трения действует в касательной плоскости к поверхностям соприкасающихся тел и при движении направлена против относительного скольжения тела.
2. Статическая сила трения пропорциональна нормальной реакции:
![]()
3. Статическая сила трения не зависит от размеров трущихся поверхностей.
4. Статический
коэффициент трения (![]() )
зависит
от материала соприкасающихся тел,
физического состояния (влажности,
температуры, степени загрязнения и т.
д.) и качества обработки. (Законы трения
относятся к числу не очень точных. Обычно
наблюдаются значительные отклонения
от них. Например, при увеличении
продолжительности неподвижного контакта
соприкасающихся тел статический
коэффициент трения возрастает, так как
в месте контакта постепенно происходит
пластическое изменение поверхностей
обоих тел и площади их соприкосновения
увеличиваются. Следовательно, размеры
трущихся поверхностей влияют на
статический коэффициент трения, а значит
и на силу трения).
)
зависит
от материала соприкасающихся тел,
физического состояния (влажности,
температуры, степени загрязнения и т.
д.) и качества обработки. (Законы трения
относятся к числу не очень точных. Обычно
наблюдаются значительные отклонения
от них. Например, при увеличении
продолжительности неподвижного контакта
соприкасающихся тел статический
коэффициент трения возрастает, так как
в месте контакта постепенно происходит
пластическое изменение поверхностей
обоих тел и площади их соприкосновения
увеличиваются. Следовательно, размеры
трущихся поверхностей влияют на
статический коэффициент трения, а значит
и на силу трения).
После начала скольжения тела коэффициент трения несколько уменьшается и принимает значение динамического коэффициента трения f.
Следовательно,
где
![]() – сила трения скольжения.
– сила трения скольжения.
Глава 5. Пространственная система сил
5.1. Сложение пространственной системы сходящихся сил. Условие равновесия
Система сил, линии действия которых произвольно расположены в пространстве, называется пространственной.
Если
к приложенным к точке А
силам
![]() и
и
![]() добавить силу
добавить силу
![]() ,
не лежащую в плоскости П действия двух
первых сил, то получим простейшую (в
количественном отношении) пространственную
систему сходящихся сил (рис. 5.1).
,
не лежащую в плоскости П действия двух
первых сил, то получим простейшую (в
количественном отношении) пространственную
систему сходящихся сил (рис. 5.1).
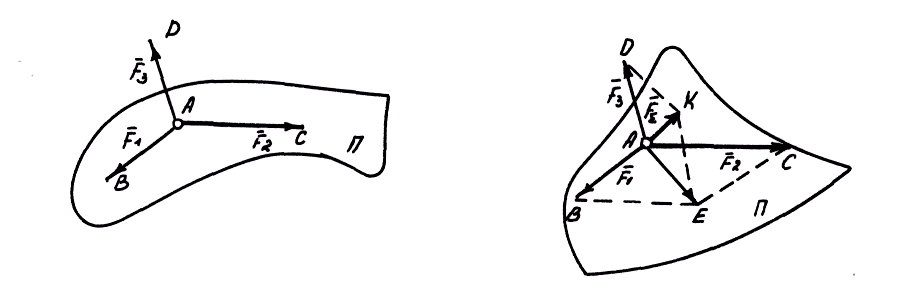
Рис. 5.1. Пространственная система сходящихся сил
Определим
равнодействующую этих сил. Сначала
построим параллелограмм АВЕС
на силах
![]() и
и![]() .
Его диагональ
.
Его диагональ
![]() .
.
Сложим
АЕ
с силой
![]() и построим параллелограмм AEKD.
Его диагональ
и построим параллелограмм AEKD.
Его диагональ
![]() .
.
Это векторное равенство выражает правило параллелепипеда при сложении приложенных к точке трех сил, не лежащих в одной плоскости.
Параллелограмм
АВЕС
образует одну из граней параллелепипеда,
в котором параллелограмм AEKD
является диагональным сечением, а
заданные силы
![]() ,
,![]() и
и![]() –
ребрами одного из его трехгранных углов.
Таким образом, равнодействующая
пространственной системы трех сил,
сходящихся в одной точке (рис. 5.2),
приложена в той же точке и по модулю и
направлению равна диагонали параллелепипеда,
ребра которого равны и параллельны
заданным силам:
–
ребрами одного из его трехгранных углов.
Таким образом, равнодействующая
пространственной системы трех сил,
сходящихся в одной точке (рис. 5.2),
приложена в той же точке и по модулю и
направлению равна диагонали параллелепипеда,
ребра которого равны и параллельны
заданным силам:
![]()
т. е. модуль равнодействующей трех сходящихся сил, расположенных в пространстве перпендикулярно друг другу, равен корню квадратному из суммы квадратов модулей этих сил.
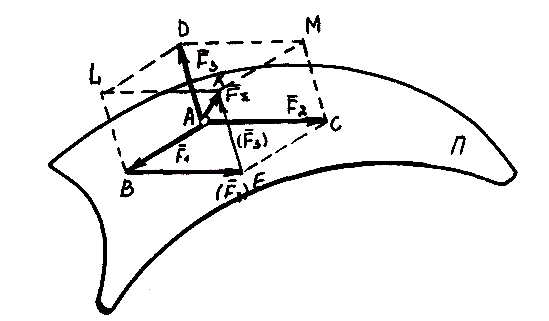
Рис. 5.2. Параллелепипед сил
Равнодействующая любого числа сходящихся сил, расположенных в пространстве, равна замыкающей стороне многоугольника, стороны которого равны и параллельны заданным силам (правило силового многоугольника) (рис. 5.3).
Аналитическое условие равновесия пространственной системы сходящихся сил выражается тремя уравнениями:
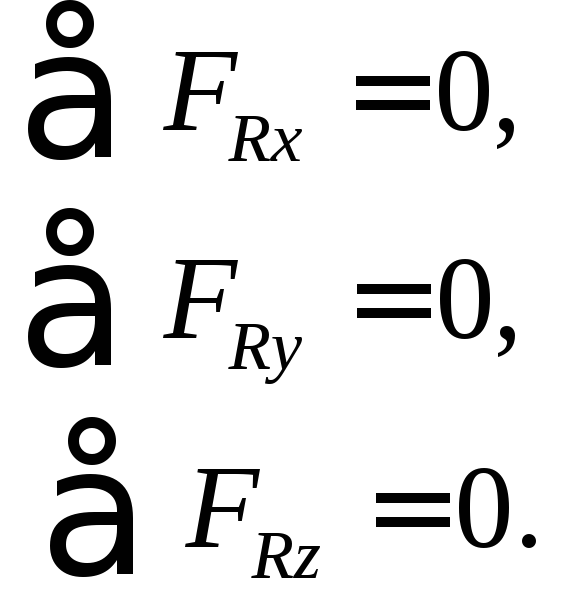
т. е. для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из трех осей координат были равны нулю.
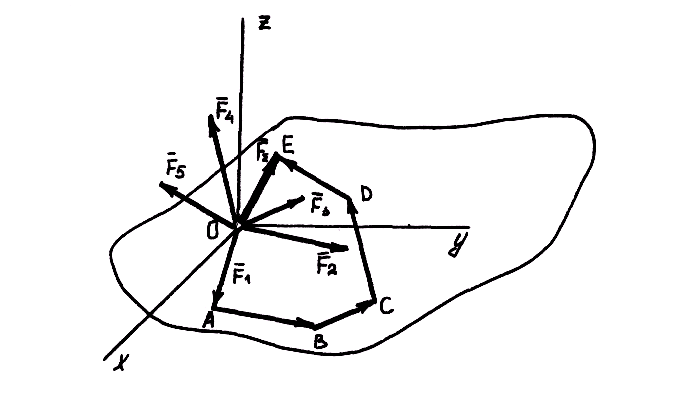
Рис. 5.3. Равнодействующая пространственной системы сходящихся сил