

9.4. Принцип Даламбера
Силы инерции широко используются при расчетах и решении технических задач, причем использование сил инерции позволяет решения многих задач, в которых рассматривается движение несвободной материальной точки, свести к знакомым нам уравнениям статики:
Условно
прикладывая силу инерции
![]() к
движущейся материальной точке, можем
считать, что активные силы
к
движущейся материальной точке, можем
считать, что активные силы
![]() ,
реакции связей
,
реакции связей
![]() и
сила инерции
и
сила инерции
![]() образуют
уравновешенную систему (принцип
Даламбера).
образуют
уравновешенную систему (принцип
Даламбера).
Решение задач динамики с помощью принципа Даламбера иногда называют методом кинетостатики.
Глава 10. Работа и мощность
10.1. Работа постоянной силы при прямолинейном перемещении
Если
при действии постоянной силы
![]() на точкуМ
(рис. 10.1) ее перемещение
на точкуМ
(рис. 10.1) ее перемещение
![]() ,
то
скалярная мера действия силы называется
работой:
,
то
скалярная мера действия силы называется
работой:
![]() ,
(10.1)
,
(10.1)
где
![]() – угол между направлением действия
силы и направлением перемещения.
– угол между направлением действия
силы и направлением перемещения.
В системе СИ работа выражается в джоулях: 1 Дж = 1 H∙м, килоджоулях: 1 кДж = 103 Дж, или в мегаджоулях: 1 МДж = 106 Дж. Из формулы (10.1) видно, что работа – величина алгебраическая.

Рис. 10.1. Работа силы
1. При
изменении угла
![]() в
пределах
в
пределах
![]() значение
значение
![]() .
Поэтому если угол
.
Поэтому если угол
![]() – острый,
то работа силы
– острый,
то работа силы
![]() положительная. В частном случае, когда
направление действия силы совпадает с
направлением перемещений (
положительная. В частном случае, когда
направление действия силы совпадает с
направлением перемещений (![]() = 0),
= 0),
![]() и
и
![]() .
.
2. При
изменении угла
![]() в пределах 90°<
в пределах 90°<![]() <180°
значение
<180°
значение
![]() .
Следовательно, если угол
.
Следовательно, если угол
![]() – тупой, то работа силы
– тупой, то работа силы ![]() отрицательная. В частном случае при
отрицательная. В частном случае при
![]() = 180°
= 180°
![]() и
и
![]() .
.
3.
Заметим, что при
![]() =
90° значение
=
90° значение
![]() и
и
![]() ,
т. е. работа силы, направленной
перпендикулярно перемещению точки,
равна нулю.
,
т. е. работа силы, направленной
перпендикулярно перемещению точки,
равна нулю.
Рассмотренные
выше три частных случая значений работы
силы при
![]() =
0°,
=
0°,
![]() = 180°,
= 180°,
![]() =
90° аналогичны значениям работы силы
тяжести. Работа силы тяжести не зависит
от траектории движения точки и всегда
равна произведению силы тяжести на
разность высот в исходном и конечном
положениях. Если точка М
(рис. 10.2) перемещается из положения
M1
в положение М2,
то при любой траектории точки работа
силы тяжести:
=
90° аналогичны значениям работы силы
тяжести. Работа силы тяжести не зависит
от траектории движения точки и всегда
равна произведению силы тяжести на
разность высот в исходном и конечном
положениях. Если точка М
(рис. 10.2) перемещается из положения
M1
в положение М2,
то при любой траектории точки работа
силы тяжести:
![]()
где
![]() – начальная высота точки над заданным
уровнем на Земле;
– начальная высота точки над заданным
уровнем на Земле;
![]() – конечная высота
над тем же уровнем.
– конечная высота
над тем же уровнем.



а б в
Рис. 10.2. Работа силы тяжести:
|
а: |
|
б: |
|
в: |
|
10.2. Работа равнодействующей силы
Если на точку действует одновременно несколько сил, то алгебраическая сумма их работ равна работе равнодействующей силы.
Допустим,
что перемещение точки
![]() произошло при действии на нее трех сил:
произошло при действии на нее трех сил:![]() и
и![]() (рис. 10.3). Тогда, обозначив работу
каждой из сил соответственноW1,
W2
и W3,
можем записать:
(рис. 10.3). Тогда, обозначив работу
каждой из сил соответственноW1,
W2
и W3,
можем записать:
![]()
Сложив правые и левые части этих равенств, получим
![]()
Известно, что сумма проекций сил на некоторую ось равна проекции равнодействующей этих сил на ту же ось:
![]()
Таким образом,
![]()
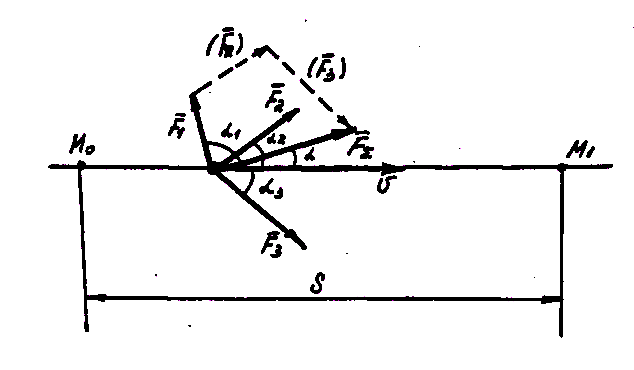
Рис. 10.3. Работа равнодействующей силы
Так
как
![]() и есть работа равнодействующей силы
и есть работа равнодействующей силы
![]() ,
,
то
![]()
или в общем случае для любого числа сил:
![]() .
.
При
равномерном прямолинейном движении
точки приложенная к ней система сил
уравновешена (первая аксиома динамики),
т. е.
![]() ,
и тогда
,
и тогда
![]()
(алгебраическая сумма работ уравновешенной системы сил, приложенных к точке, равна нулю).