

Глава 4. Плоская система произвольно расположенных сил (пспрс)
4.1. Приведение силы к точке
Теорема
о параллельном переносе силы в любую
заданную или выбранную точку.
Пусть дана сила
![]() ,
приложенная к точке А
твердого тела (рис. 4.1, а),
и ее требуется перенести в точку О.
Приложим к телу в точке О
уравновешенную систему сил
,
приложенная к точке А
твердого тела (рис. 4.1, а),
и ее требуется перенести в точку О.
Приложим к телу в точке О
уравновешенную систему сил
![]() ,
параллельных
,
параллельных
![]() и равных ей по модулю (т. е.
и равных ей по модулю (т. е.
![]() ,
рис. 4.1,б).
Теперь кроме силы
,
рис. 4.1,б).
Теперь кроме силы
![]() ,
приложенной к точке О,
образовались пара сил
,
приложенной к точке О,
образовались пара сил
![]() с моментом
с моментом
![]() и момент данной силы
и момент данной силы
![]() относительно точки О:
относительно точки О:
![]() ,
т. е.
,
т. е.![]() (рис. 4.1,в).
(рис. 4.1,в).
|
|
|
|
|
а |
б |
в |

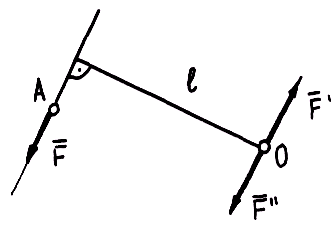

Рис. 4.1. Параллельный перенос силы
Таким
образом, всякую силу
![]() ,
приложенную к телу в точке А,
можно переносить параллельно линии
действия в любую точку О,
присоединив пару сил, момент которой
равен моменту данной силы относительно
новой точки ее приложения.
,
приложенную к телу в точке А,
можно переносить параллельно линии
действия в любую точку О,
присоединив пару сил, момент которой
равен моменту данной силы относительно
новой точки ее приложения.
Операция
такого переноса силы называется
приведением
силы к точке,
а появляющаяся при этом пара
![]() с моментом
с моментом
![]() –
присоединенной
парой.
–
присоединенной
парой.
Операция приведения силы к точке имеет глубокий физический смысл.
4.2. Приведение к точке плоской системы произвольно расположенных сил
Пусть
задана система четырех сил
![]() и
и
![]() (рис. 4.2).
(рис. 4.2).
Выберем
произвольную точку O
– центр приведения – и приведем к нему
силу
![]() ,
т. е. перенесем силу
,
т. е. перенесем силу![]() в
точку O,
присоединим пару сил с моментом
в
точку O,
присоединим пару сил с моментом
![]() (на рисунке присоединенные моменты
изображены круговыми стрелками,
направленными в сторону поворота силами
(на рисунке присоединенные моменты
изображены круговыми стрелками,
направленными в сторону поворота силами![]() и
и
![]() соответствующих
плеч
соответствующих
плеч
![]() ).
).
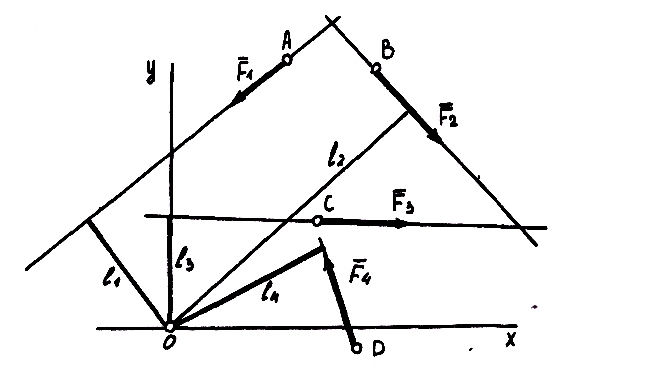
Рис. 4.2. Плоская система произвольно расположенных сил
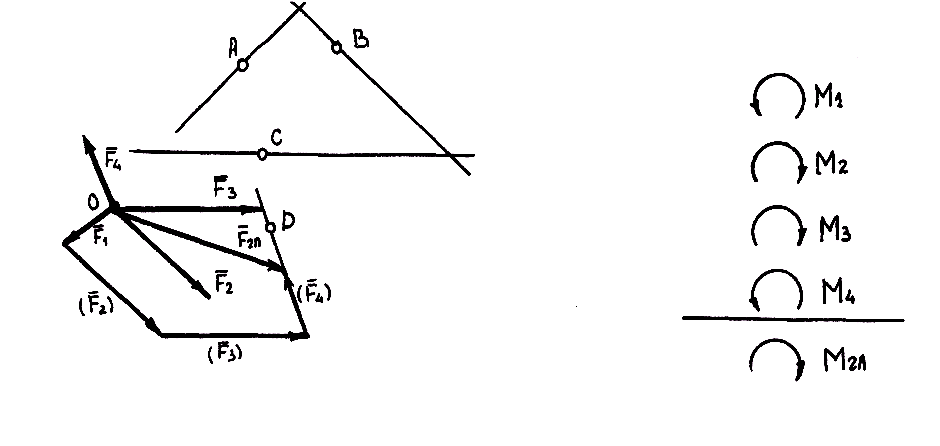
Рис. 4.3. Приведение системы сил к центру
Затем
приведем к точке O
силу
![]() .
Перенесем ее в эту точку и присоединим
пару с моментом
.
Перенесем ее в эту точку и присоединим
пару с моментом
![]() .
Так же поступим с остальными силами
.
Так же поступим с остальными силами
![]() и
и
![]() ,
присоединив пары с моментами
,
присоединив пары с моментами
![]() и
и![]() .
Как видно из рис. 4.3, в результате
последовательного приведения заданных
сил к точке образовалась система
сходящихся сил и система присоединенных
пар с моментами, равными моментам
заданных сил относительно точки (центра)
приведения.
.
Как видно из рис. 4.3, в результате
последовательного приведения заданных
сил к точке образовалась система
сходящихся сил и система присоединенных
пар с моментами, равными моментам
заданных сил относительно точки (центра)
приведения.
С
помощью силового многоугольника находим
силу
![]() ,
эквивалентную системе приведенных сил.
Сложив алгебраические моменты
присоединенных пар, найдем момент одной
эквивалентной им пары:
,
эквивалентную системе приведенных сил.
Сложив алгебраические моменты
присоединенных пар, найдем момент одной
эквивалентной им пары:
![]()
или, так как моменты присоединенных пар равны моментам данных сил относительно центра приведения:
![]()
Главный
вектор системы
![]() .
.
Главный
момент системы
![]() .
.
Произвольная плоская система сил эквивалентна одной силе – главному вектору – и одной паре, момент которой равен главному моменту.
Допустим,
что, приведя плоскую систему сил к точке,
мы получили главный вектор
![]() и пару сил с моментом
и пару сил с моментом
![]() (рис. 4.4).
(рис. 4.4).
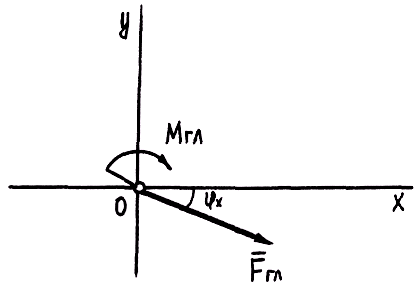
Рис. 4.4. Главный вектор и главный момент сил
Представим
главный момент в виде пары сил (![]() ),
численно равных главному вектору (
),
численно равных главному вектору (![]() ),
с плечом
),
с плечом
![]() .
Расположим эту пару таким образом, чтобы
одна из сил оказалась направленной
вдоль линии действия главного вектора,
но в противоположную сторону (рис. 4.5).
.
Расположим эту пару таким образом, чтобы
одна из сил оказалась направленной
вдоль линии действия главного вектора,
но в противоположную сторону (рис. 4.5).
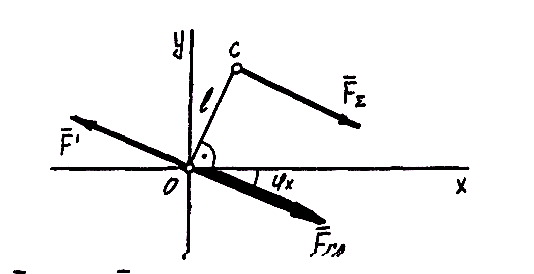
Рис. 4.5
Тогда
силы
![]() и
и
![]() можно исключить, как взаимно уравновешенные,
а оставшаяся сада
можно исключить, как взаимно уравновешенные,
а оставшаяся сада
![]() и есть искомая равнодействующая
рассматриваемой системы сил (рис. 4.6).
и есть искомая равнодействующая
рассматриваемой системы сил (рис. 4.6).
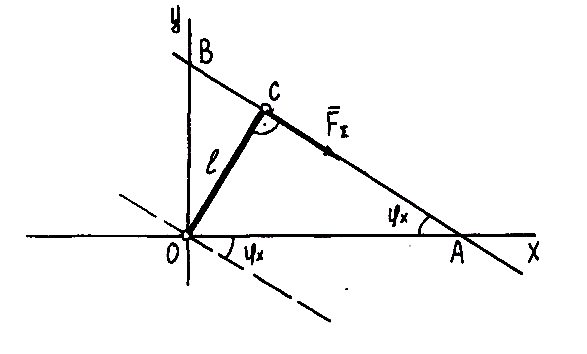
Рис. 4.6. Равнодействующая системы сил
Расстояние от центра приведения до линии действия равнодействующей:
![]()
Следовательно, равнодействующая ПСПРС равна главному вектору и расстояние от центра приведения до линии действия равнодействующей равно частному от деления главного момента на модуль главного вектора или равнодействующей.