

Предисловие
Данное издание предназначено для студентов, изучающих курс механики по программе, утвержденной Министерством образования Республики Беларусь для высших учебных заведений.
Изложение материала в основном соответствует традиционной программе механики исходя из того, что она является комплексной общепрофессиональной дисциплиной по немашиностроительным специальностям.
Пособие включает в себя основные положения дисциплин «Теоретическая механика», «Сопротивление материалов», «Теория механизмов и машин», «Детали машин». Необходимым явилось включение в курс механики в том или ином объеме положений дисциплины «Расчет и конструирование изделий отрасли».
Цель пособия – дать студенту знания и навыки по выполнению расчетов и конструированию, необходимые при последующем изучении специальных дисциплин, а также в его профессиональной деятельности.
В силу компактности и комплексного характера курса механики на лекциях требуется лаконичность изложения материала при достаточно подробном изложении лишь принципиальных вопросов.
Автор использует данный материал при прочтении лекций по механике.
Настоящее пособие рекомендуется всем тем, кто изучает, преподает и просто интересуется элементарной механикой.
Пособие будет полезно при изучении, повторении и углублении курса механики, а также для быстрого нахождения, беглого прочтения и восстановлении в памяти необходимой информации, может быть использовано для самостоятельной работы студентов.
Автор считает своей обязанностью выразить благодарность А.Т. Скойбеде, оказавшему помощь в подготовке книги, а также с благодарностью примет все замечания об этом пособии.
Раздел 1 основы расчета абсолютно твердого тела как модели механического объекта
Глава 1. Основные положения статики
1.1. Общие сведения
Материальной точкой называют геометрическую точку, обладающую массой.
Абсолютно твердым телом называют такое материальное тело, в котором расстояние между любыми двумя точками всегда остается неизменным.
Способность тел сопротивляться изменению их формы и размеров называется жесткостью.
Мера механического действия одного материального тела на другое называется силой. Сила – величина векторная. Она определяется, во-первых, числовым значением (модулем), во-вторых, точкой приложения (местом контакта взаимодействующих тел), в-третьих, направлением действия.
В Международной системе единиц (СИ) сила выражается в ньютонах (сокращенное обозначение Н). 1 Н – небольшая сила, поэтому часто употребляют кратные единицы – килоньютон (1 кН = 103 Н) и меганьютон (1 МН = 106 Н).
Как всякий вектор силу можно изобразить графически в виде направленного отрезка (рис. 1.1).
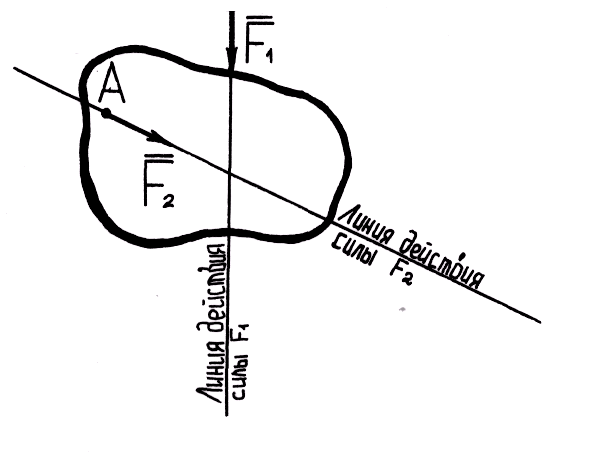
Рис. 1.1. Векторы сил
Сила тяжести всегда направлена вертикально вниз (рис. 1.2).

Рис. 1.2. Сила тяжести
Несколько сил, действующих на какое-либо одно твердое тело, называются системой сил.
Силы, действующие на твердое тело со стороны других тел, называются внешними. Силы, действующие на материальные точки твердого тела со стороны других точек того же тела, называются внутренними.