

6.5. Частные случаи движения точки
1. Прямолинейное
движение.
Если
![]() ,
то точка движется прямолинейно, так как
при
,
то точка движется прямолинейно, так как
при![]() направление скорости остается неизменным.
направление скорости остается неизменным.
2. Равномерное
движение.
При
![]() уравнение
равномерного движения
уравнение
равномерного движения
![]() .
.
При
начальном расстоянии
![]() ,
т. е. точка в момент начала движения
находится в начале отсчета расстояний,
уравнение равномерного движения
упрощается:
,
т. е. точка в момент начала движения
находится в начале отсчета расстояний,
уравнение равномерного движения
упрощается:
![]() .
.
Если
![]() и
и
![]() ,
то движение точки называется равномерным
прямолинейным.
Если
,
то движение точки называется равномерным
прямолинейным.
Если
![]() и
и
![]() ,
то точка движется равномерно по
криволинейной траектории.
,
то точка движется равномерно по
криволинейной траектории.
Равномерное движение точки по окружности
При
таком движении (рис. 6.10)
![]() и
и![]() ,
так как при равномерном движении
,
так как при равномерном движении![]() ,
а при движении по окружности
,
а при движении по окружности
![]() .
Из формулы
.
Из формулы
![]() скорость равномерного движения по
окружности
скорость равномерного движения по
окружности
![]() .
.
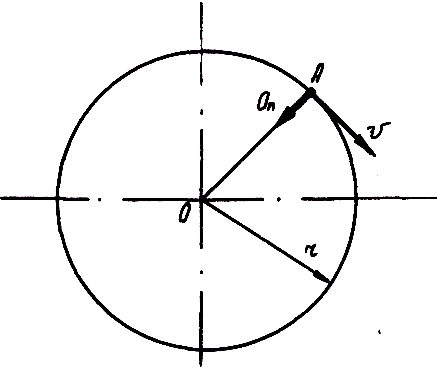
Рис. 6.10. Равномерное движение точки по окружности
Если
принять t
= Т
– периоду, т. е. времени одного обхода
точкой окружности, то
![]() и
и
![]() или
или
![]() ,
,
где
![]() –
диаметр окружности.
–
диаметр окружности.
3. Равнопеременное
движение.
Если
![]() ,
то движение точки называется
равнопеременным.
,
то движение точки называется
равнопеременным.
Уравнение равнопеременного движения точки
![]() .
.
![]() – скорость
в любой момент времени.
– скорость
в любой момент времени.
![]() и
и
![]() .
.
А. При равнопеременном прямолинейном движении, если не известно время t, получим первую вспомогательную формулу
Если
не известно
![]() :
:
![]() ,
,
где
![]() – средняя скорость точки при ее
равномерном движении.
– средняя скорость точки при ее
равномерном движении.
Б. Если
равноускоренное движение точки начинается
из начала отсчета траектории (S0
= 0) и без начальной скорости (![]() ),
то предыдущие формулы приобретают более
простой вид:
),
то предыдущие формулы приобретают более
простой вид:
Примерами такого движения могут служить движение автомобиля при трогании с места или движение самолета на взлетной полосе, а также известное из физики свободное падение тел.
В. При
свободном падении
![]() .
В этом случае, если в формулах из пункта
(Б) S
заменить высотой падения Н,
то формулы примут вид
.
В этом случае, если в формулах из пункта
(Б) S
заменить высотой падения Н,
то формулы примут вид
Предпоследняя
из этих формул, представленная в виде
![]() ,
называется формулой
Галилея.
,
называется формулой
Галилея.
Глава 7. Простейшие движения твердого тела
7.1. Поступательное движение
Движение твердого тела, при котором любой выбранный в теле отрезок прямой перемещается, оставаясь параллельным своему первоначальному положению, называется поступательным.
Рассмотрим
две точки А
и В,
соединенные отрезком АВ
(рис. 7.1). Очевидно, что при перемещении
отрезка АВ
параллельно первоначальному положению
(![]() )
точки A
и В
движутся по одинаковым траекториям,
т. е. если траекторию
)
точки A
и В
движутся по одинаковым траекториям,
т. е. если траекторию
![]() совместить с траекторией
совместить с траекторией
![]() ,
то они совпадут. Если вместе с точкой A
рассмотреть движение точки C,
то при движении тела отрезок АС
также остается параллельным своему
первоначальному положению (
,
то они совпадут. Если вместе с точкой A
рассмотреть движение точки C,
то при движении тела отрезок АС
также остается параллельным своему
первоначальному положению (![]() )
и траектория точки C
(кривая
)
и траектория точки C
(кривая
![]() )
одинакова с траекториями
)
одинакова с траекториями
![]() и
и
![]() :
:
![]() ,
или
,
или
![]() ,
или
,
или
![]() ;
;
![]() ,
или
,
или
![]() ,
или
,
или
![]() .
.
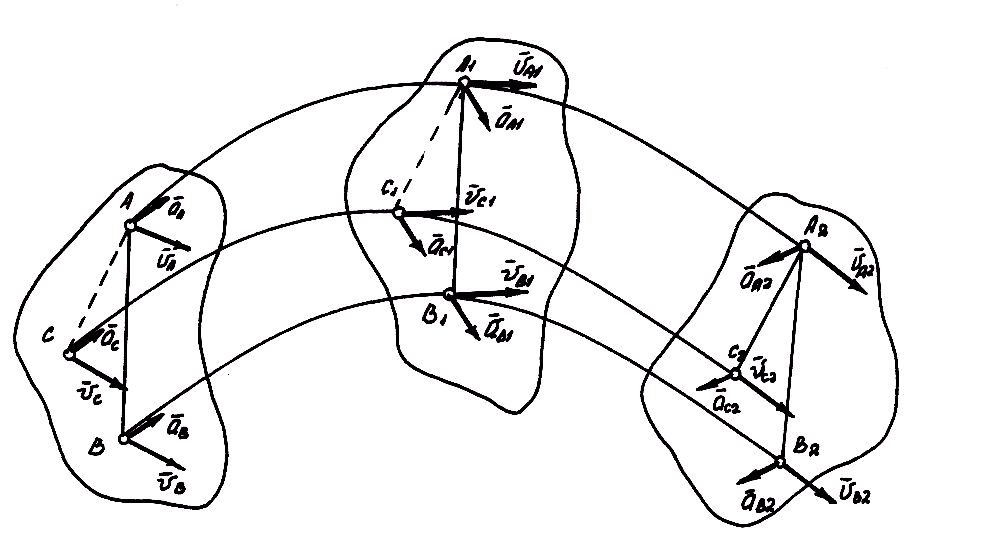
Рис. 7.1. К анализу поступательного движения твердого тела
Как видим, поступательное движение твердого тела полностью характеризуется движением любой его точки. Обычно поступательное движение тела задается движением его центра тяжести, иначе говоря, при поступательном движении тело можно считать материальной точкой.
Примерами поступательного движения тел могут служить какой-либо ползун 1, движущийся в прямолинейных направляющих 2 (рис. 7.2, а), или прямолинейно движущийся автомобиль (вернее, не весь автомобиль, а его шасси с кузовом). Иногда криволинейное движение на поворотах дорог автомобилей или поездов условно принимают за поступательное. В подобных случаях говорят, что автомобиль или поезд движутся с такой-то скоростью или с таким-то ускорением.
Примерами криволинейного поступательного движения служат движение вагончика (люльки) подвесной канатной дороги (рис. 7.2, б) или движение спарника (рис. 7.2, в), соединяющего два параллельных кривошипа. В последнем случае каждая точка спарника движется по окружности.
а б в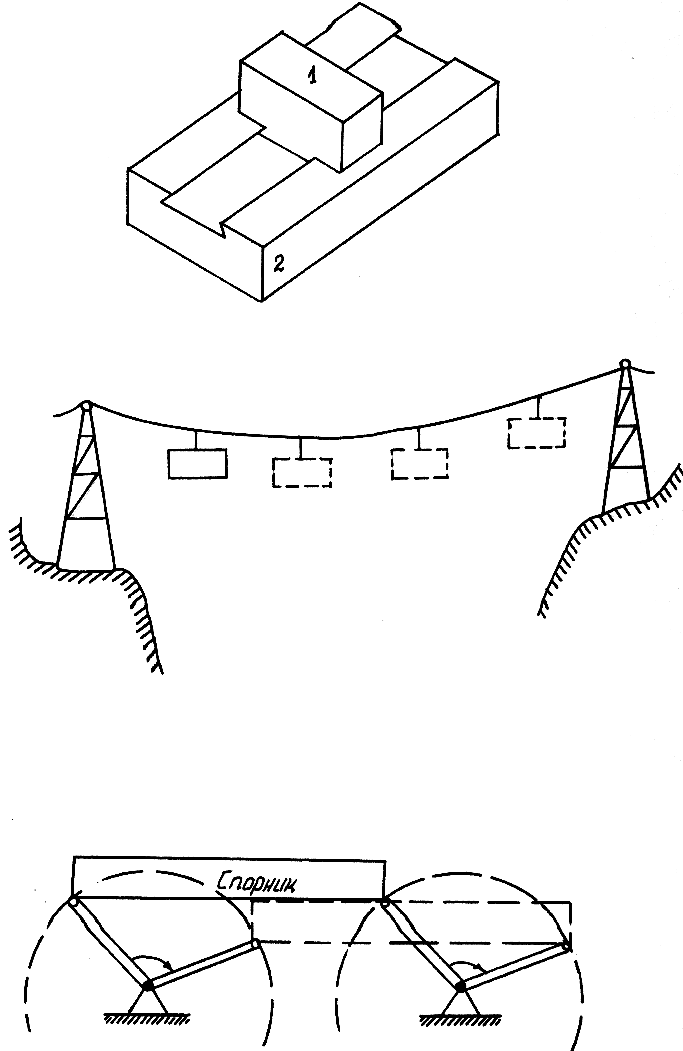
Рис. 7.2. Примеры поступательного движения тел:
а – прямолинейного; б, в – криволинейного