

Глава 2. Плоская система сходящихся сил
2.1. Сложение плоской системы сходящихся сил. Геометрическое условие равновесия
Система сил, линии действия которых лежат в одной плоскости и пересекаются в одной точке, называется плоской системой сходящихся сил. Если силы сходящейся системы приложены к разным точкам тела, то по первому следствию из аксиом статики каждую силу можно перенести в точку пересечения линий действия и получить эквивалентную систему сил, приложенных к одной точке (рис. 2.1).
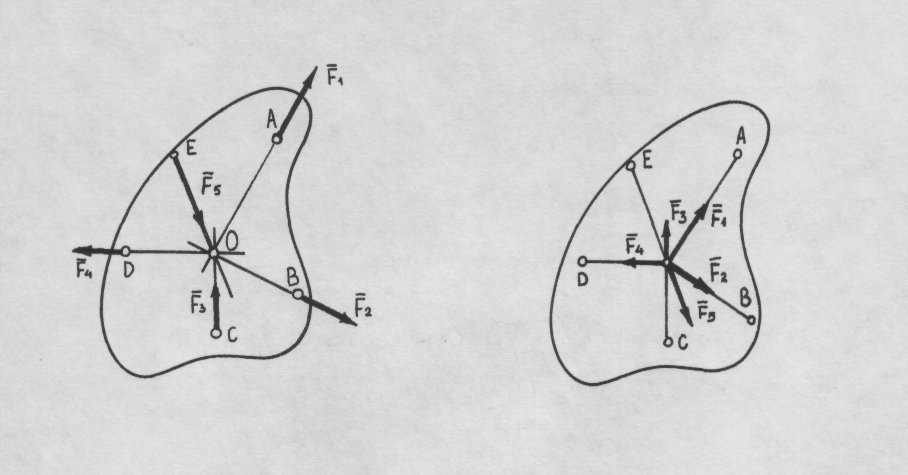
Рис. 2.1. Плоская система сходящихся сил
Две силы, приложенные к одной точке тела, образуют простейшую плоскую систему сходящихся сил (две пересекающиеся прямые всегда лежат в одной плоскости).
Рассмотрим
систему сил
![]() ,
приложенных в точкеА.
Требуется найти их равнодействующую
(рис. 2.2).
,
приложенных в точкеА.
Требуется найти их равнодействующую
(рис. 2.2).
Применив
правило силового треугольника, сложим
силы
![]() и
и
![]() .
Для этого из конца вектора
.
Для этого из конца вектора
![]() отложим вектор
отложим вектор
![]() и,
соединив точки А
и С,
получим геометрическую сумму
(равнодействующую) сил
и,
соединив точки А
и С,
получим геометрическую сумму
(равнодействующую) сил
![]() и
и
![]() :
:
![]()

Рис. 2.2. Многоугольник сил
Теперь
сложим силу
![]() с силой
с силой
![]() .
Для этого из конца вектора ВС
=
.
Для этого из конца вектора ВС
=
![]() отложим
вектор
отложим
вектор
![]() и,
соединив точки А
и D,
получим равнодействующую трех сил:
и,
соединив точки А
и D,
получим равнодействующую трех сил:
![]()
где
![]() –
искомая равнодействующая.
–
искомая равнодействующая.
Порядок построения сторон силового многоугольника не влияет на окончательный результат.
Чтобы уравновесить систему сил, достаточно к ней добавить еще одну силу, численно равную равнодействующей, но направленную в противоположную сторону (рис. 2.3).
Рис. 2.3. Равнодействующая системы сил
Необходимое и достаточное условие равновесия системы сходящихся сил в геометрической форме: система сходящихся сил уравновешена тогда и только тогда, когда силовой многоугольник замкнут.
2.2. Определение равнодействующей системы сходящихся сил методом проекций. Аналитическое условие равновесия
Вместо построения силового многоугольника равнодействующую системы сходящихся сил более точно и значительно быстрее находят вычислением с помощью метода проекций, который обычно называется аналитическим.
Проекцией
вектора
![]() на
ось
называется длина направленного отрезка
оси, заключенного между двумя
перпендикулярами, опущенными из
начала и конца вектора
на
ось
называется длина направленного отрезка
оси, заключенного между двумя
перпендикулярами, опущенными из
начала и конца вектора
![]() .
Проекция
силы на ось равна произведению модуля
этой силы на косинус угла между
направлением силы и положительным
направлением оси (рис. 2.4):
.
Проекция
силы на ось равна произведению модуля
этой силы на косинус угла между
направлением силы и положительным
направлением оси (рис. 2.4):
Рис. 2.4. Проекции векторов сил на оси
Рассмотрим определение равнодействующей системы сходящихся сил методом проекций.
Допустим,
что для заданной системы сходящихся
сил построен многоугольник ABCDE,
в котором вектор
![]() – искомая равнодействующая данной
системы.
– искомая равнодействующая данной
системы.
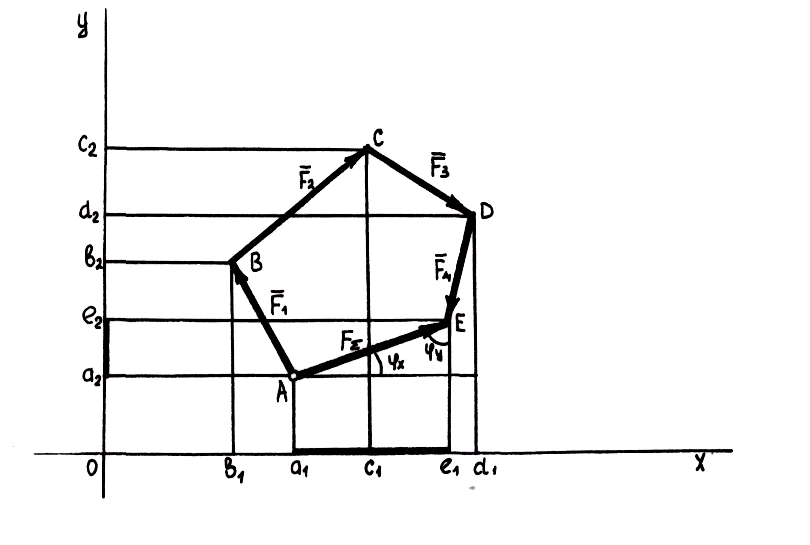
Рис. 2.5. Многоугольник сил
Выбрав систему координатных осей X и Y в плоскости силового многоугольника, спроецируем его на эти оси:
В краткой форме эти равенства записываются так:
![]()
где
![]() – знак суммы, а индекс k
последовательно принимает значения от
1 до n,
по числу сходящихся сил, равнодействующая
которых определяется.
– знак суммы, а индекс k
последовательно принимает значения от
1 до n,
по числу сходящихся сил, равнодействующая
которых определяется.
Таким образом, проекция равнодействующей системы сходящихся сил на каждую из осей координат равна алгебраической сумме проекций составляющих сил на ту же ось:
![]() .
.
Условие равновесия плоской системы сходящихся сил в аналитической форме: для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил системы на каждую из двух осей координат были равны нулю.