

Глава 8. Сложное движение
8.1. Сложное движение точки
Примером сложного движения точки может служить:
а) лодка (если ее принять за материальную точку), плывущая от одного берега реки к другому;
б) шагающий по ступенькам движущегося эскалатора метро человек, который также совершает сложное движение относительно неподвижного свода туннеля.
Таким образом, при сложном движении точка, двигаясь относительно некоторой подвижной материальной среды, которую условимся называть подвижной системой отсчета, одновременно передвигается вместе с этой системой отсчета относительно второй системы отсчета, условно принимаемой за неподвижную.
Движение некоторой точки М по отношению к подвижной системе отсчета называется относительным. Движение подвижной системы отсчета вместе со всеми связанными с ней точками материальной среды по отношению к неподвижной системе отсчета для точки М называется переносным. Движение точки М по отношению к неподвижной системе отсчета называется сложным, или абсолютным.
Для того чтобы видеть сложное (абсолютное) движение точки, наблюдатель сам должен быть связан с неподвижной системой отсчета. Если же наблюдатель находится в подвижной системе отсчета, то он видит лишь относительную часть сложного движения.
Представим, что точка М за некоторое время переместилась относительно подвижной системы координат O1X1Y1 из начального положения M0 в положение М1 по траектории M0М1 (траектории относительного движения точки) (рис. 8.1). За это же время Δt подвижная система координат O1X1Y1 вместе со всеми неизменно связанными с ней точками, а значит, и вместе с траекторией относительного движения точки М переместилась в неподвижной системе координат OXY в новое положение:
![]()
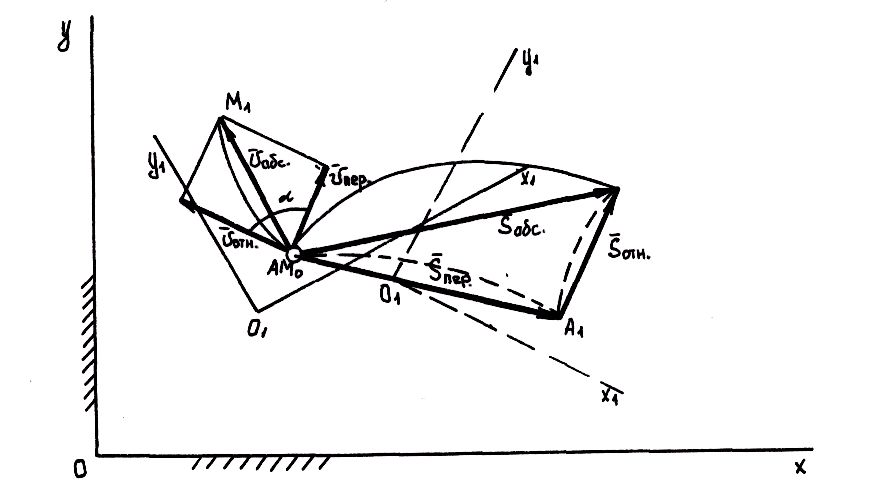
Рис. 8.1. К анализу сложного движения точки
Разделим обе части этого равенства на время движения Δt:
![]()
и получим геометрическую сумму средних скоростей:
![]() ,
,
которые
направлены вдоль соответствующих
векторов перемещений. Если теперь
перейти к пределам при
![]() ,
то получим уравнение
,
то получим уравнение
![]()
![]()
выражающее теорему сложения скоростей: при сложном движении точки абсолютная скорость в каждый момент времени равна геометрической сумме переносной и относительной скоростей.
Если
задан угол
![]() ,
то
модуль абсолютной скорости
,
то
модуль абсолютной скорости
![]()
Углы,
образуемые векторами абсолютной скорости
![]() с
векторами
с
векторами
![]() и
и
![]() ,
определяются по теореме синусов.
,
определяются по теореме синусов.
В
частном случае при
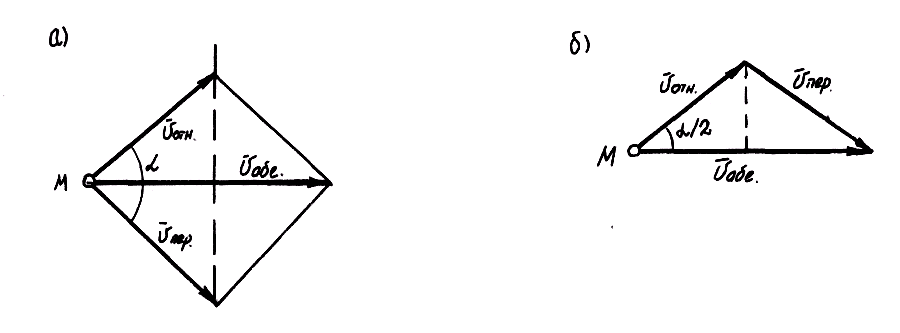
![]() при сложении этих скоростей образуется
ромб (рис. 8.2,а)
или равнобедренный треугольник (рис. 8.2,
б)
и, следовательно,
при сложении этих скоростей образуется
ромб (рис. 8.2,а)
или равнобедренный треугольник (рис. 8.2,
б)
и, следовательно,
![]()



а б
Рис. 8.2. Частный случай
8.2. Плоскопараллельное движение тела
Движение твердого тела, при котором все его точки движутся в плоскостях, параллельных некоторой неподвижной плоскости, называется плоскопараллельным (рис. 8.3).

Рис. 8.3. Плоскопараллельное движение твердого тела
Изучая плоскопараллельное движение тела М, достаточно рассматривать движение его плоского сечения q плоскости ХОY (рис. 8.4).
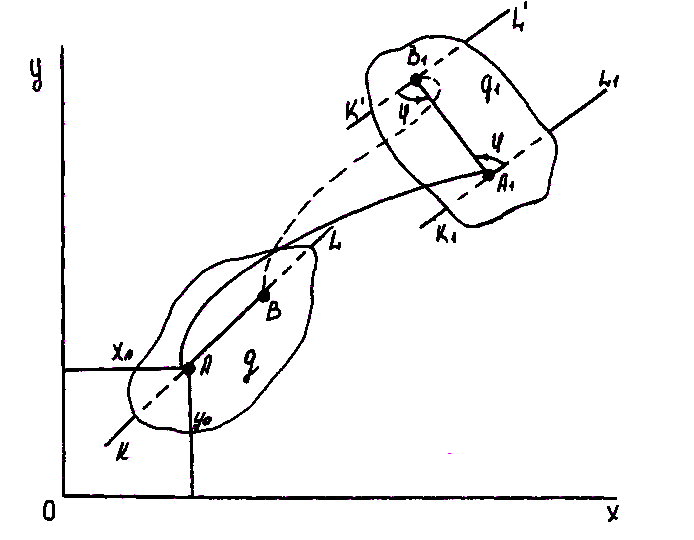
Рис. 8.4. К анализу плоскопараллельного движения твердого тела
Выберем в сечении q произвольную точку A, которую назовем полюсом. С полюсом А свяжем некоторую прямую KL, а в самом сечении вдоль прямой KL проведем отрезок AB, перемещая плоское сечение из положения q в положение q1. Можно сначала передвинуть его вместе с полюсом А поступательно, а затем повернуть на угол φ.
Плоскопараллельное движение тела – движение сложное и состоит из поступательного движения вместе с полюсом и вращательного движения вокруг полюса.
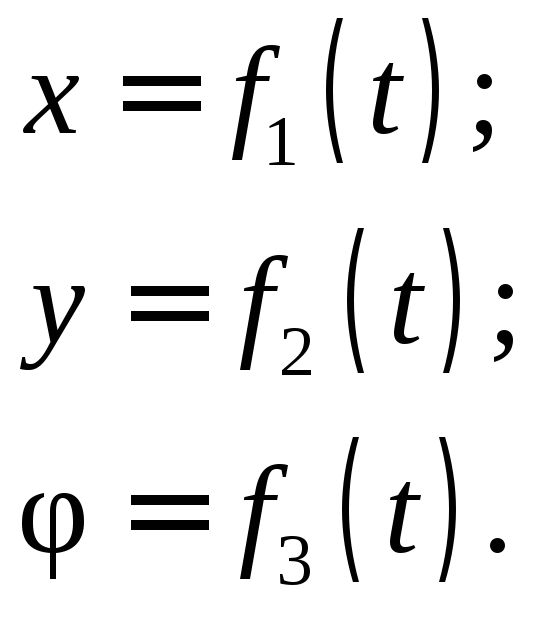
Закон плоскопараллельного движения можно задать тремя уравнениями:
Дифференцируя
заданные уравнения плоскопараллельного
движения, можно в каждый момент
времени определить скорость
![]() и
ускорение
и
ускорение
![]() полюса, а также угловую скорость
полюса, а также угловую скорость
![]() и угловое ускорение
и угловое ускорение
![]() тела.
тела.
Пример 8.1. Пусть движение катящегося колеса диаметром d (рис. 8.5) задано уравнениями

где
![]() и
и
![]() – м, φ –
рад, t
– с.
– м, φ –
рад, t
– с.
Продифференцировав
эти уравнения, находим, что скорость
полюса O
![]() угловая скорость колеса
угловая скорость колеса
![]() Ускорение полюса и угловое ускорение
колеса в данном случае равны нулю. Зная
скорость полюса и угловую скорость
тела, можно затем определить скорость
любой его точки.
Ускорение полюса и угловое ускорение
колеса в данном случае равны нулю. Зная
скорость полюса и угловую скорость
тела, можно затем определить скорость
любой его точки.
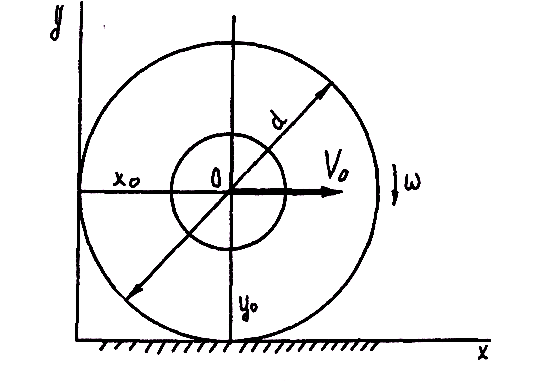
Рис. 8.5. К примеру 8.1