

23.2. Скольжение ремня
Кинематические и геометрические параметры передачи. Движение ремня по шкиву сопровождается упругим скольжением.
Причину этого явления можно понять из рассмотрения деформации упругого ремня на заторможенном шкиве. Предположим, что к обоим концам ремня подвешены одинаковые грузы, создающие в ремне силы F1 (рис. 23.6, а). В результате между шкивом и ремнем возникнут некоторые контактные давления, а спадающие ветви ремня получат относительные удлинения
![]() ,
,
где Е · A – жесткость сечения ремня при растяжении.
а б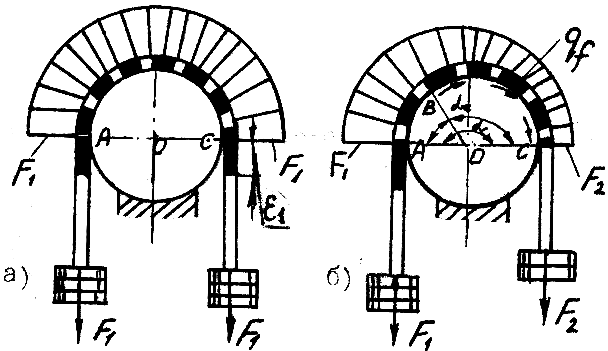
Рис. 23.6. Схемы деформаций ремня на шкиве
Если
теперь на одном конце, например,
правом, несколько уменьшить груз и тем
самым силу в ветви до значения F2
(рис. 23.6, б),
то относительное удлинение правого
конца уменьшится до значения
![]() ,
а относительное удлинение левого конца
останется прежним. Относительное
сокращение длины (
,
а относительное удлинение левого конца
останется прежним. Относительное
сокращение длины (![]() )
элемента правой спадающей ветви
распространится вдоль ремня по дуге
обхвата от точкиС
к точке А,
вызывая скольжение ремня по шкиву справа
налево. Так как ремень прижат к шкиву,
то скольжение вызовет силы трения qf,
направленные навстречу относительному
скольжению. Скольжение ремня и изменение
деформаций прекратятся в некоторой
точке В
дуги обхвата. Ее положение можно
определить из равенства разности сил
F1
и F2
суммарной силе трения. На дуге ВА
ремень будет находиться в покое. Сумма
длин дуг АВ
и ВС
равна длине дуги обхвата шкива ремнем
(АС),
определяемой углом
обхвата
α. Угол αc
, соответствующий дуге ВС,
называют углом
скольжения.
По мере уменьшения силы F2
(или увеличения силы F1)
дуга упругого скольжения растет за счет
уменьшения дуги покоя. Так как скольжение
ремня связано с его упругими свойствами,
то его называют упругим.
)
элемента правой спадающей ветви
распространится вдоль ремня по дуге
обхвата от точкиС
к точке А,
вызывая скольжение ремня по шкиву справа
налево. Так как ремень прижат к шкиву,
то скольжение вызовет силы трения qf,
направленные навстречу относительному
скольжению. Скольжение ремня и изменение
деформаций прекратятся в некоторой
точке В
дуги обхвата. Ее положение можно
определить из равенства разности сил
F1
и F2
суммарной силе трения. На дуге ВА
ремень будет находиться в покое. Сумма
длин дуг АВ
и ВС
равна длине дуги обхвата шкива ремнем
(АС),
определяемой углом
обхвата
α. Угол αc
, соответствующий дуге ВС,
называют углом
скольжения.
По мере уменьшения силы F2
(или увеличения силы F1)
дуга упругого скольжения растет за счет
уменьшения дуги покоя. Так как скольжение
ремня связано с его упругими свойствами,
то его называют упругим.
Полезная нагрузка (окружная сила) Ft передачи, развиваемая в основном за счет сил трения на дуге скольжения:
![]()
где F1 – сила натяжения ведущей ветви, набегающей на ведущий шкив;
F2 – сила натяжения ведомой ветви, сбегающей с ведущего шкива;
T1 – вращающий момент;
d1 – диаметр ведущего шкива.
Положение точки В на шкиве также зависит от нагрузки и условий трения.
Кинематика
передачи.
При вращении ведущего шкива с угловой
скоростью
![]() его
окружная скорость
его
окружная скорость
![]() (здесь
(здесь![]() –
скорость
ведущей ветви ремня). В результате
упругого скольжения ремень сбегает с
ведущего шкива в точке С
со скоростью
–
скорость
ведущей ветви ремня). В результате
упругого скольжения ремень сбегает с
ведущего шкива в точке С
со скоростью
![]() .
Коэффициент упругого скольжения
.
Коэффициент упругого скольжения
![]()
где
![]() и
и
![]() –
угловая
скорость и диаметр ведомого шкива.
–
угловая
скорость и диаметр ведомого шкива.
Передаточное отношение
![]()
В расчетах на основании экспериментов принимают ε = 0,01 – для плоскоременных передач; ε = 0,015–0,020 – для клиноременных передач.
Основные геометрические параметры. Минимальное межосевое расстояние в плоскоременных передачах
![]()
В клиноременных передачах (на основании практики)
![]()
а максимальное межосевое расстояние
![]()
Требуемая длина ремня для передачи при заданном (или желательном) межосевом расстоянии a и угле обхвата α определяется как сумма прямолинейных участков и дуг обхвата:
![]()
Угол обхвата меньшего шкива
![]()
23.3. Усилия и напряжения в ремнях. Тяговая способность и кпд передачи
Начальное натяжение ремня – необходимое условие работы ременной передачи. Сила Fнач (начального натяжения ремня) вызывает в его ветвях силы
![]()
где γ – угол наклона ветви ремня к линии центров передачи. При действии вращающего момента T1 силы в ветвях будут равны F1 и F2 (рис. 23.7).
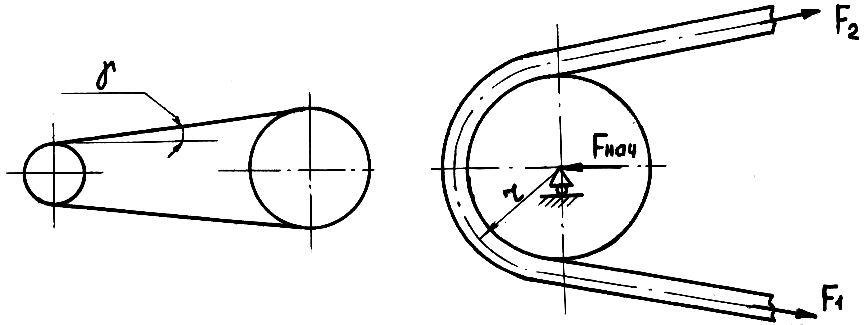
Рис. 23.7. Силы натяжения ветвей ремня
Напряжения в сечениях ведущей и ведомой ветвей ремня от начального натяжения
![]()
и при действии внешней нагрузки
![]()
где А – площадь поперечного сечения ремня.
Наибольшие
напряжения испытывают наружные волокна
в зоне контакта ремня с малым шкивом.
Здесь к основным растягивающим напряжениям
![]() от полезной нагрузки добавляются
дополнительные напряжения растяжения
от полезной нагрузки добавляются
дополнительные напряжения растяжения![]() и
и![]() соответственно от центробежных сил и
изгиба ремня (как стержня) вокруг шкива
(рис. 23.8), следовательно,
соответственно от центробежных сил и
изгиба ремня (как стержня) вокруг шкива
(рис. 23.8), следовательно,
![]()
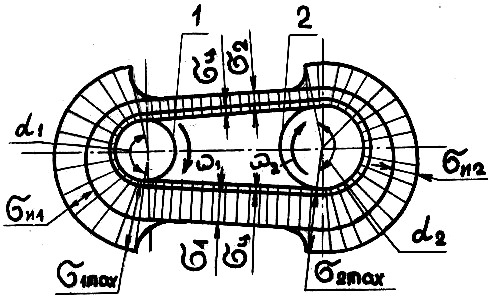
Рис. 23.8. Распределение напряжений в ремне
Фактическую тяговую способность передачи характеризует окружная сила Ft или вращающий момент T1, который может развить ведущий шкив:
![]() (23.1)
(23.1)
где
![]() – коэффициент тяги.
– коэффициент тяги.
Из
равенства (23.1) видно, что тяговая
способность передачи возрастает при
увеличении силы F0
начального натяжения ветвей ремня и
коэффициента тяги
![]() .
С увеличением силыF0
возрастает сила натяжения F1
ведущей ветви под нагрузкой и существенно
снижается долговечность ремня.
.
С увеличением силыF0
возрастает сила натяжения F1
ведущей ветви под нагрузкой и существенно
снижается долговечность ремня.
Для получения высокой тяговой способности передач с плоским ремнем рекомендуется обеспечивать α ≥ 150º.
Благодаря хорошему сцеплению ремня со шкивом клиноременные передачи хорошо работают при углах обхвата α ≥ 120º.
Коэффициент тяги
![]()
Экспериментально
установлено, что коэффициенты тяги
![]() и
упругого скольжения ремня ε взаимосвязаны
(кривая скольжения, рис. 23.9).
и
упругого скольжения ремня ε взаимосвязаны
(кривая скольжения, рис. 23.9).
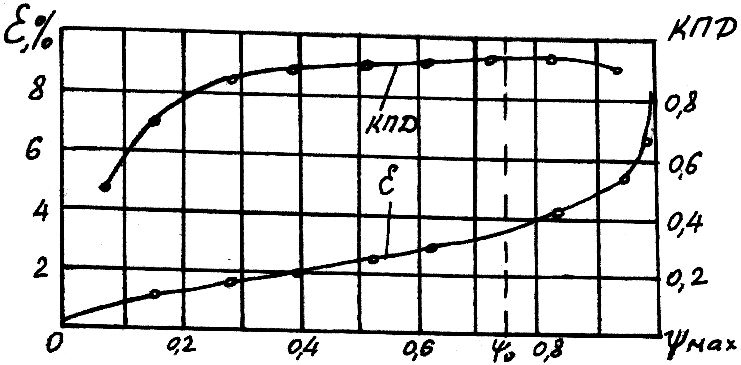
Рис. 23.9. Кривая скольжения и зависимость КПД
от коэффициента тяги в клиноременной передаче
КПД передач. При работе плоскоременной передачи часть энергии расходуется на упругий гистерезис при циклическом деформировании ремня (растяжение, сдвиг, изгиб), на скольжение ремня по шкивам, аэродинамическое сопротивление движению ремня и шкивов, а также трение в подшипниках валов передачи.
В клиноременной передаче к этим потерям добавляются потери на трение при радиальном перемещении ремня в процессе его входа в канавку и выхода из нее.
КПД ременной передачи
![]()
зависит
от коэффициента тяги
![]() (см. соотношение (23.1)) и соответствующего
ему коэффициента относительного
скольжения ремня ε (см. рис. 23.9). Наибольший
КПД соответствует некоторому значению
(см. соотношение (23.1)) и соответствующего
ему коэффициента относительного
скольжения ремня ε (см. рис. 23.9). Наибольший
КПД соответствует некоторому значению![]() на
линейном участке кривой скольжения.
Когда
на
линейном участке кривой скольжения.
Когда
![]() ,
КПД снижается из-за нарастания потерь
на трение.
,
КПД снижается из-за нарастания потерь
на трение.
При
оптимальной нагрузке
![]() = 0,97–0,98 для плоскоременной передачи и
0,92–0,97 – для клиноременной.
= 0,97–0,98 для плоскоременной передачи и
0,92–0,97 – для клиноременной.
Главные критерии работоспособности передачи. Опыт эксплуатации ременных передач показал, что их работоспособность ограничена тяговой способностью и долговечностью ремня.
Расчет ременных передач на тяговую способность основан на показателях тяговой способности и долговечности.
Для расчета используют условие работоспособности передачи в виде
![]() (23.2)
(23.2)
где
![]() –
удельная окружная сила, называемая
полезным напряжением;
–
удельная окружная сила, называемая
полезным напряжением;
A – площадь поперечного сечения ремня (комплекта ремней);
![]() –допускаемое
полезное напряжение.
–допускаемое
полезное напряжение.
Удельная
окружная сила
![]() – параметр, характеризующий тяговую
способность передачи.
– параметр, характеризующий тяговую
способность передачи.
Расчет тяговой способности передач с нормальными и узкими клиновыми ремнями сводится к определению требуемого числа ремней по соотношению, вытекающему из условия (23.2):
![]()
где Cz – коэффициент, учитывающий неравномерность распределения нагрузки между ремнями в комплекте (технологическое ограничение), Cz = 0,85–1;
A1 – площадь сечения одного ремня.
Расчет тяговой способности плоскоременной передачи сводится к определению ширины ремня:
![]()
где Ср – коэффициент динамичности, учитывающий режим работы передачи.
h – толщина ремня.