

Глава 22. Червячные передачи
22.1. Общие сведения. Геометрические и кинематические особенности червячных передач
Червячная передача представляет собой передачу, у которой ведущее колесо (червяк) выполнено с малым числом зубьев (z1 = 1–4), а ведомое (червячное) колесо имеет большое число зубьев (z2 > 28). Угол скрещивания осей обычно составляет 90°.
Червяки бывают следующих видов:
– архимедов червяк, торцовым профилем которого является архимедова спираль (рис. 22.1);
– конволютный;
– эвольвентный, представляющий собой косозубое зубчатое колесо с очень большим углом наклона и малым числом зубьев.
Червяки имеют стандартный угол профиля α = 20° в осевом сечении.
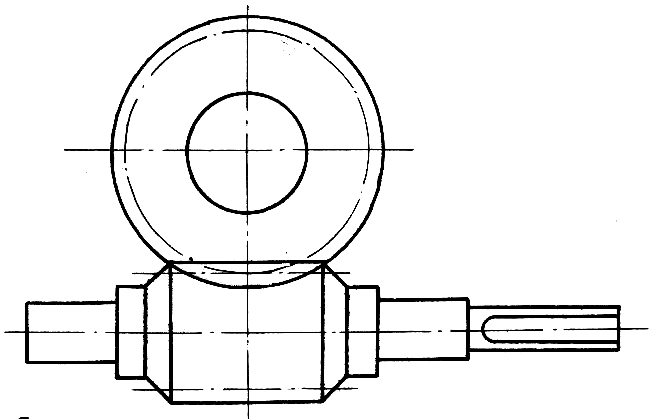
Рис. 22.1. Передача с цилиндрическим червяком
Достоинства червячных передач состоят в возможности получения больших передаточных отношений в одной ступени (обычно i = 10–60, реже i = 60–100), плавности и бесшумности работы, возможности самоторможения.
Основной недостаток передач – низкий КПД, который ведет к большому тепловыделению и для отвода теплоты часто требует применения специальных устройств (обдув, оребрение корпуса и др.). Это, а также необходимость применения цветных металлов существенно ограничивают области использования червячных передач (мощность до 50–60 кВт, окружная скорость – до 15 м/с).
Диаметры
колес определяются, как для цилиндрических
зубчатых колес при коэффициенте высоты
головки
![]() =
1 и коэффициенте радиального зазора
=
1 и коэффициенте радиального зазора
![]() .
.
Диаметр делительного цилиндра червяка (рис. 22.2)
![]()
где q – коэффициент диаметра червяка, принимаемый в зависимости от модуля m для обеспечения жесткости;
![]() –осевой модуль
червяка, стандартизован ГОСТ 19642–74
(m
=
1; 1,25; 1,6; 2; 2,5; 3,15; 4; 5; 6,3; 8; 10; 12.5 и т. д.);
–осевой модуль
червяка, стандартизован ГОСТ 19642–74
(m
=
1; 1,25; 1,6; 2; 2,5; 3,15; 4; 5; 6,3; 8; 10; 12.5 и т. д.);
p – шаг червяка.
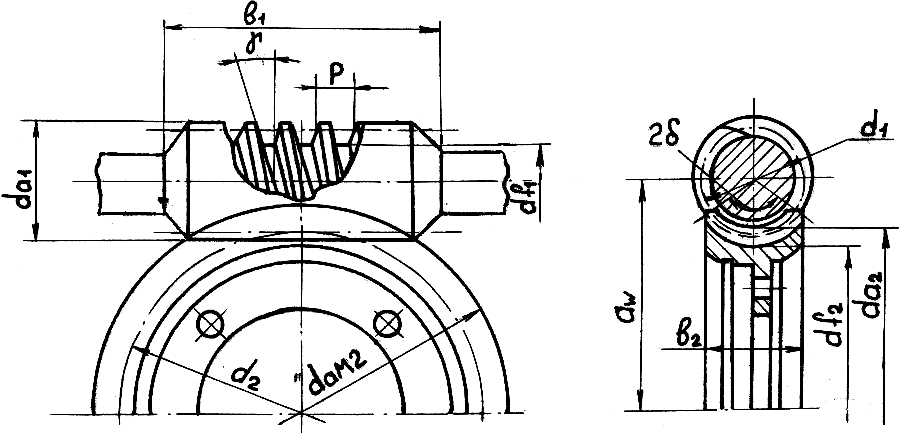
Рис. 22.2. Зацепление червячной передачи
Делительный угол подъема винтовой линии γ (обычно 5–20°) определяется по формуле
![]()
где z1 = 1; 2; 4 – число витков (заходов) червяка.
При меньшем числе заходов z1 угол γ будет меньше, ниже будет и КПД; при больших z1 увеличиваются радиальные габариты и стоимость передачи. В передачах мощных приводов из-за больших потерь и сильного нагрева не рекомендуют использовать однозаходные червяки.
При u = 10–18, 18–40 число заходов соответственно 4 и 2, а при u > 40 число заходов 1.
Диаметры окружностей вершин и впадин червяка
где
![]() =
1,0 – коэффициент высоты головки;
=
1,0 – коэффициент высоты головки;
![]() –
коэффициент
высоты ножки;
–
коэффициент
высоты ножки;
![]() =
0,2 – коэффициент радиального зазора.
=
0,2 – коэффициент радиального зазора.
Червячное
колесо является косозубым с углом
наклона линии зуба
![]() .
Диаметр колеса
.
Диаметр колеса
![]()
где z2 – число зубьев колеса.
Межосевое расстояние
![]()
Длина b1 нарезной части червяка принимается такой, чтобы обеспечить зацепление с возможно большим числом зубьев колеса.
Ширина колеса b2 назначается из условия получения угла обхвата червяка колесом:
![]()
За
один оборот червяка зуб колеса,
контактирующий с некоторым его витком,
переместится по окружности на расстояние
![]() подъема витка и колесо повернется на
угол
подъема витка и колесо повернется на
угол![]() .
Передаточное отношение червячной
передачи
.
Передаточное отношение червячной
передачи
![]()
Обычно i = 20–60 в силовых передачах, i ≤ 300 в кинематических цепях приборов и делительных механизмов.
В червячном зацеплении наблюдается скольжение. Витки червяка скользят при движении по зубьям колеса.
Для уменьшения износа материалы червяка и колеса должны образовывать антифрикционную пару, имеющую минимально возможный коэффициент трения. Для повышения прочности и жесткости червяки обычно изготовляют из стали 40ХН, 12XH3A, 3ОХГСА и др., а колеса – из бронз БрА9Ж3Л, БрА10Ж4Н4Л или венцы колес – из бронзы БрО10Ф1.
КПД передачи
![]()
где
Т1
и
![]() –
вращающий момент и угловая скорость
червяка;
–
вращающий момент и угловая скорость
червяка;
Т2
и
![]() –
то же для колеса.
–
то же для колеса.
В
предварительном расчете можно для z1
=
1; 2; 4 соответственно принять
![]() = 0,7–0,75; 0,75–0,82; 0,87–0,92.
= 0,7–0,75; 0,75–0,82; 0,87–0,92.
Невысокий КПД свидетельствует о том, что в червячной передаче значительная часть энергии превращается в теплоту. Вызванное этим повышение температуры ухудшает защитные свойства масляного слоя, увеличивает опасность заедания и выхода передачи из строя.