

19.2. Особенности расчета статически неопределимых стержневых систем
Если внутренние силы определялись только на основе условий равновесия отсеченной части системы (или отдельного бруса), системы называют статически определимыми.
Системы, в которых внутренние силовые факторы (ВСФ), в частности продольные силы, не могут быть определены с помощью только метода сечений, называют статически неопределимыми системами. Соответственно задачи, связанные с расчетом указанных систем, также принято называть статически неопределимыми.
Брус, изображенный на рис. 19.1, жестко заделан обоими концами; в заделках возникают реакции, направленные вдоль оси бруса. Таким образом на брус действует система сил, направленных по одной прямой; статика в этом случае дает одно уравнение равновесия:
![]()
неизвестных же сил – две.
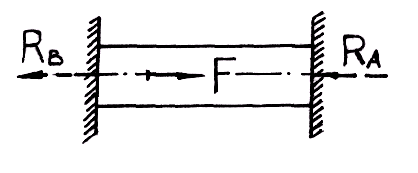
Рис. 19.1. Статически неопределимая система
Для решения статически неопределимой задачи помимо уравнений статики надо составить так называемые уравнения перемещений, основанные на рассмотрении деформации системы (это геометрическая сторона задачи) и применении закона Гука.
Пусть невесомая, весьма жесткая балка, нагруженная силой F, подвешена на стержнях (рис. 19.2). Стержни изготовлены из одинакового материала и имеют одинаковые сечения. Система один раз статически неопределима: для плоской системы параллельных сил статика дает два независимых уравнения равновесия, а неизвестных сил – три. Обозначим реакции, так же, как и силы, действующие на стержни, через N1, N2, N3.

Рис. 19.2. Статически неопределимая задача
Составляем уравнения равновесия приложенных к балке сил (рис. 19.3):
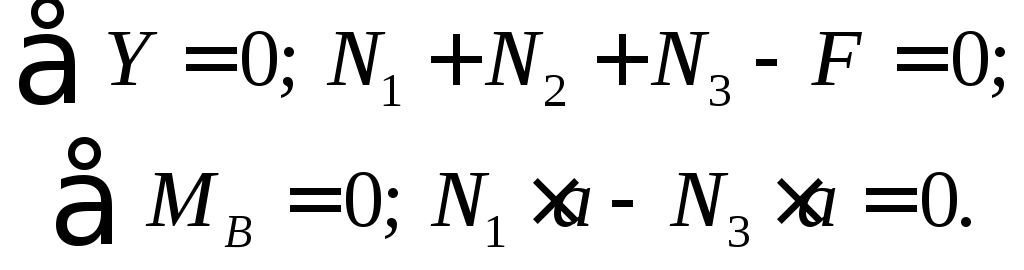 (19.1)
(19.1)
N3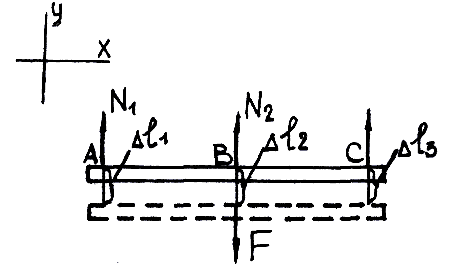
Рис. 19.3. Схема деформации системы
В результате деформации стержней балка займет положение, показанное на рис. 19.3 штриховыми линиями. Действительно, предположение о высокой жесткости балки позволяет пренебречь ее изгибом, а симметрия самой системы и нагрузки приводит к заключению, что все стержни удлиняются одинаково. Таким образом, геометрическая сторона задачи может быть выражена уравнением
![]()
Выражая удлинения стержней по формуле Гука, получим
![]() ,
,
откуда
![]() .
(19.2)
.
(19.2)
Решая совместно уравнения (19.1) и (19.2), находим силы в стержнях:
![]()
19.3. Напряженно-деформированное состояние при прямом поперечном изгибе
Изгиб – это такой вид деформации бруса, при котором в его поперечных сечениях возникают изгибающие моменты. В большинстве случаев одновременно с изгибающими моментами возникают и поперечные силы; такой изгиб называют поперечным; если поперечные силы не возникают, изгиб называют чистым.
Плоскость, проходящую через продольную ось бруса (OZ) и одну из главных центральных осей его поперечного сечения (OY), называют главной плоскостью бруса (рис. 19.4).
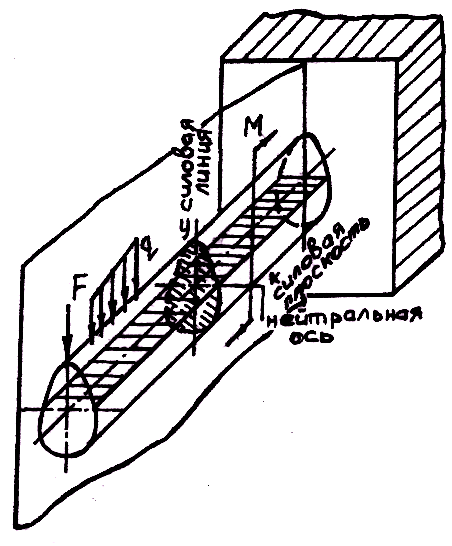
Рис. 19.4. Схема нагружения бруса при прямом поперечном изгибе
В
случае если силовая
плоскость,
т. е. плоскость действия нагрузок,
совпадает с одной из главных плоскостей
(см. рис. 19.4), имеет место прямой
изгиб бруса.
В общем случае прямого изгиба в поперечных
сечениях бруса возникают два внутренних
силовых фактора: поперечная
сила
![]() и изгибающий
момент
и изгибающий
момент
![]() (рис.
19.5).
(рис.
19.5).
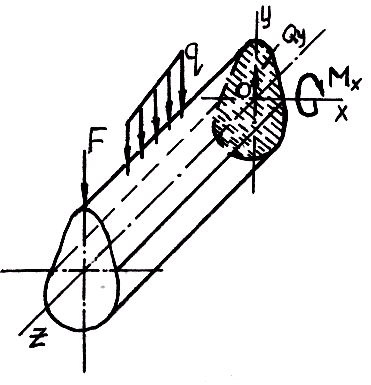
Рис. 19.5. Силовые факторы при изгибе
Границей между областями растяжения и сжатия является слой волокон, который лишь искривляется, не испытывая при этом ни растяжения, ни сжатия. Это так называемый нейтральный слой. Линия пересечения нейтрального слоя с плоскостью поперечного сечения бруса называется нейтральной осью или нулевой линией (см. рис. 19.4).
Брусья, работающие на прямой изгиб, принято называть балками. Схемы основных типов статически определимых балок показаны на рис. 19.6: а – простая консоль; б – двухопорная балка без консолей; в – двухопорная балка с одной консолью; г – двухопорная балка с двумя консолями. Расстояние между опорами балки называют пролетом, а длину балки, защемленной одним концом (рис. 19.9, а), иногда называют вылетом. Консолью называют часть балки, расположенную по одну сторону от опор (рис. 19.9, в, г).
а б в г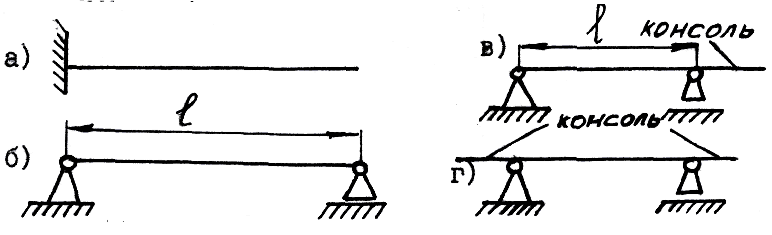
Рис. 19.6. Обозначение балочных конструкций
Учитывая, что при прямом поперечном изгибе все внешние силы расположены в одной плоскости, при определении ВСФ нет надобности прибегать к аксонометрическим изображениям.
Брус (балку) изображают одной линией, к которой приложены заданные нагрузки. Эта линия представляет собой продольную ось бруса.
Рассмотрим двухопорную балку (рис. 9.7). Считаем, что опорные реакции известны.
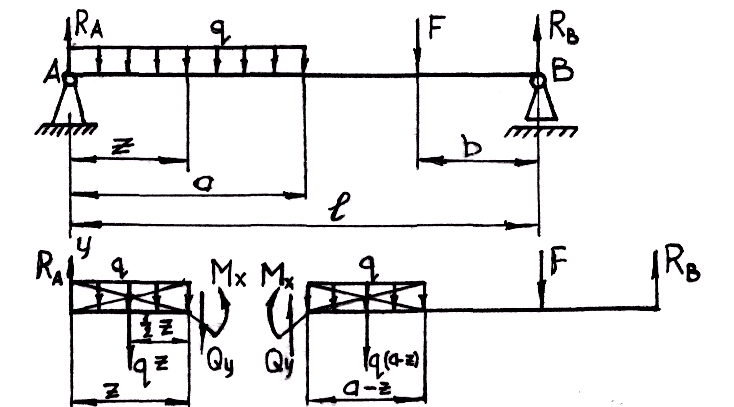
Рис. 19.7. К определению внутренних силовых факторов
в сечении изгибаемой балки
Определяем реакции в опорах:
![]()
откуда
![]()
![]()
откуда
![]() .
.
Поперечная сила Qy в произвольном поперечном сечении бруса численно равна алгебраической сумме внешних сил, приложенных к его отсеченной части.
Изгибающий момент Mx в произвольном поперечном сечении бруса численно равен алгебраической сумме моментов всех внешних сил, приложенных к отсеченной части, относительно той точки продольной оси бруса, через которую проходит рассматриваемое сечение.
Для определенности при построении эпюр поперечных сил и изгибающих моментов установим для них правила знаков.
При построении эпюр удобнее устанавливать знаки Qy и Mx по внешним силам.
Внешняя сила, стремящаяся повернуть отсеченную часть балки по часовой стрелке вокруг той точки оси, которая соответствует проведенному сечению, вызывает положительную поперечную силу (рис. 19.8, а).
Внешняя сила (момент), изгибающая эту часть выпуклостью вниз, т. е. таким образом, что сжатые волокна находятся сверху, дает положительный изгибающий момент (рис. 19.8, б).
а б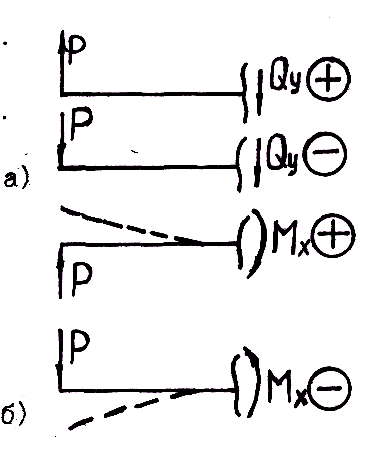
Рис. 19.8. Правило знаков для Qy и Mx