

8.3. Определение скорости любой точки тела при плоскопараллельном движении
Пусть
дано плоское сечение q,
угловая скорость и скорость полюса
которого в некоторый момент времени
соответственно
![]() и
и
![]() .Требуется
определить скорость какой-либо точки
А
(рис. 8.6).
.Требуется
определить скорость какой-либо точки
А
(рис. 8.6).
Расчленим
плоскопараллельное движение на составные
части – поступательную и вращательную.
При поступательном движении вместе
с полюсом (переносное движение) все
точки сечения, и точка А
в том числе, имеют переносную скорость
![]() ,
равную скорости полюса. Одновременно
с поступательным сечениеq
совершает
вращательное движение с угловой
скоростью
,
равную скорости полюса. Одновременно
с поступательным сечениеq
совершает
вращательное движение с угловой
скоростью
![]() (относительное движение):
(относительное движение):
![]() ,
,
где ![]() –
относительная скорость точки A
(
–
относительная скорость точки A
(![]() ).
).
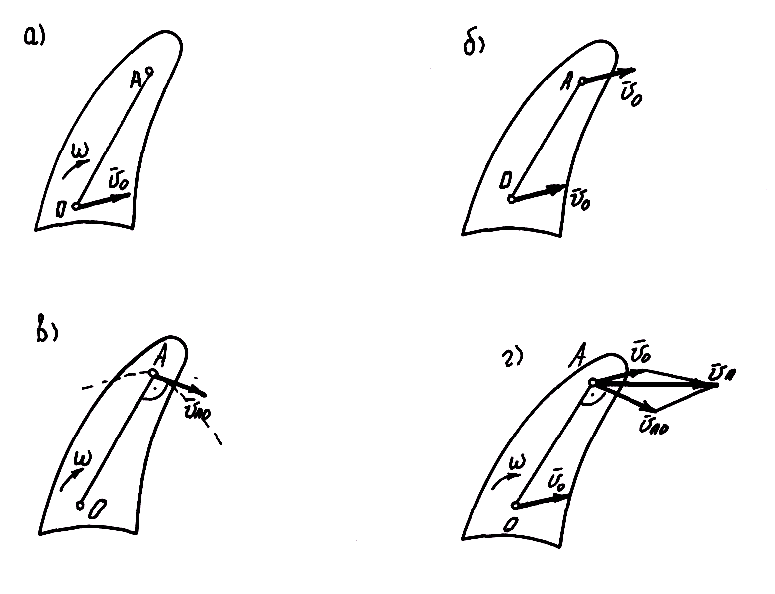




Рис. 8.6. К определению скорости тела при плоскопараллельном движении
Следовательно, в каждый данный момент времени
![]() ,
,
т. е. абсолютная скорость точки тела при плоскопараллельном движении равна геометрической сумме скорости полюса и относительной скорости этой точки вокруг полюса.
Модуль абсолютной скорости может быть определен по формуле
![]() ,
,
а направление – с помощью теоремы синусов. Если же направление абсолютной скорости известно, то ее модуль проще определить на основании следующей теоремы: проекции скоростей двух точек твердого тела на прямую, соединяющую эти точки, равны между собой.
Допустим,
что известны скорости
![]() и
и
![]() точек A
и В
какого-либо тела (рис. 8.7). Приняв за
полюс точку A,
получим
точек A
и В
какого-либо тела (рис. 8.7). Приняв за
полюс точку A,
получим
![]() .
.
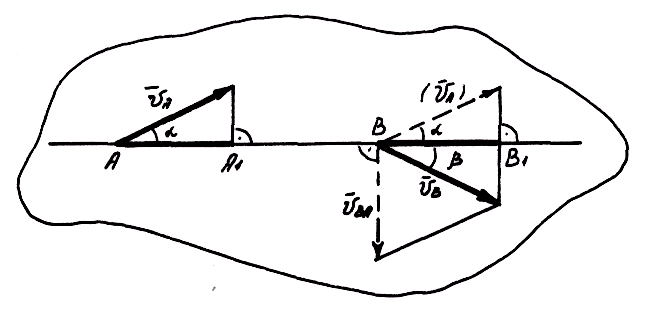
Рис. 8.7. Векторы скоростей точек плоской фигуры
Относительная
скорость
![]() перпендикулярна
АВ.
Следовательно,
перпендикулярна
АВ.
Следовательно,
![]() или
или
![]() .
Теорема доказана.
.
Теорема доказана.
Глава 9. Движение несвободной материальной точки
9.1. Основные понятия и аксиомы динамики
Динамика изучает движение материальных тел под действием сил. В основе динамики лежат следующие аксиомы.
Аксиома 1 (принцип инерции). Всякая изолированная материальная точка находится в состоянии покоя или равномерного и прямолинейного движения, пока приложенные силы не выведут ее из этого состояния.
Аксиома 2 (основной закон динамики). Ускорение материальной точки пропорционально действующей силе F и направлено по той прямой, по которой действует эта сила (рис. 9.1).
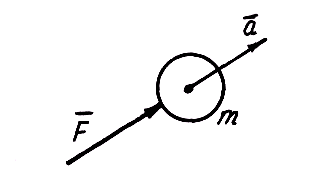
Рис. 9.1. К основному закону динамики
Математически вторая аксиома записывается векторным равенством
![]() ,
,
где m – коэффициент пропорциональности, выражающий меру инертности материальной точки и называемый ее массой.
В Международной системе единиц (СИ) масса выражается в килограммах.
Зависимость между числовыми значениями (модулями) сил и ускорения выражается равенством
![]() .
.
На все материальные тела вблизи Земли действует сила тяжести G. При свободном падении на Землю телá любой массы приобретают одно и то же ускорение g, которое называется ускорением свободного падения. Для свободно падающего тела из предыдущего уравнения следует зависимость:
![]() .
.
Таким образом, значение силы тяжести тела в ньютонах равно произведению его массы на ускорение свободного падения.
Аксиома 3 (закон независимости действия сил). Если к материальной точке приложена система сил, то каждая из сил системы сообщает точке такое же ускорение, какое она сообщила бы, действуя одна.
Таким
образом, при одновременном действии на
материальную точку массой m,
например, четырех сил, ускорение а,
полученное точкой, можно определить
геометрически сложив ускорения
![]() и
и
![]() ,
возникающие под действием каждой силы
в отдельности (рис. 9.2). В то же время
ускорение
,
возникающие под действием каждой силы
в отдельности (рис. 9.2). В то же время
ускорение
![]() пропорционально
равнодействующей
пропорционально
равнодействующей
![]() тех
же сил:
тех
же сил:
![]()
где
![]() и
и
![]() .
.
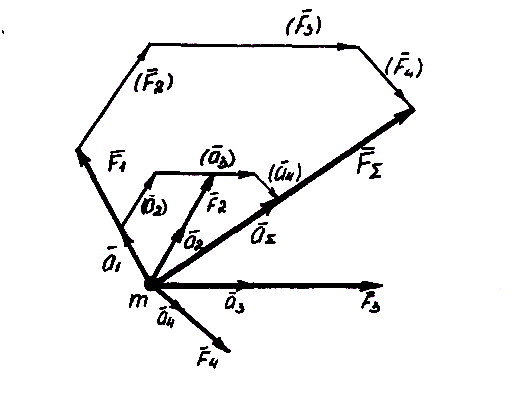
Рис. 9.2. К закону независимости действия сил
Аксиома 4. Две материальные точки действуют друг на друга с силами, равными по модулю и направленными в противоположные стороны.