

16.2. Напряжение как мера внутренних сил
Для суждения об интенсивности внутренних сил в определенной точке данного сечения введено понятие о напряжении.
Выделим
в окрестности интересующей нас точки
сечения малую площадку площадью
![]() ;
допустим, что на этой площадке
возникает внутренняя сила
;
допустим, что на этой площадке
возникает внутренняя сила
![]() (рис. 16.5). Отношение этой внутренней силы
к площади выделенной площадки называется
средним
напряжением
(рис. 16.5). Отношение этой внутренней силы
к площади выделенной площадки называется
средним
напряжением
![]() в окрестности рассматриваемой точки
по проведенному сечению (на площадке
в окрестности рассматриваемой точки
по проведенному сечению (на площадке
![]() ):
):
![]()
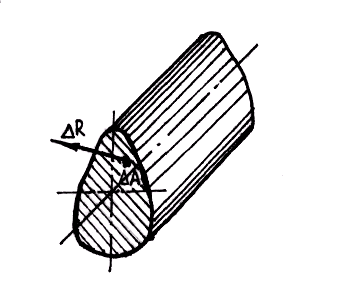
Рис. 16.5. Элементарная сила в точке сечения
Истинное напряжение в данной точке рассматриваемого сечения
![]()
Отношение будет величиной конечной.
Напряжение
в данной точке по рассматриваемому
сечению есть величина векторная (вектор
![]() делим на скаляр
делим на скаляр
![]() );
направление этого вектора совпадает с
предельным направлением вектора
);
направление этого вектора совпадает с
предельным направлением вектора
![]() .
.
Единица измерения напряжения – паскаль (Па).
Паскаль – это напряжение, при котором на площадке в 1 м2 возникает внутренняя сила, равная 1 H; но эта единица очень мала, поэтому используется кратная ей единица – мегапаскаль, 1 МПа = 106 Па.
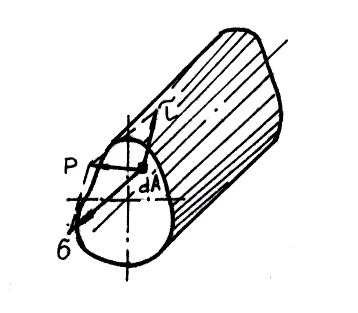
Разложим
вектор напряжения р
на две составляющие: одну – направленную
по нормали к сечению (нормальное
напряжение
![]() ),
вторую – лежащую в плоскости сечения
(касательное напряжение
),
вторую – лежащую в плоскости сечения
(касательное напряжение ![]() )
(рис. 16.6). Между напряжениямир,
)
(рис. 16.6). Между напряжениямир,
![]() и
и
![]() существует следующая очевидная
зависимость:
существует следующая очевидная
зависимость:
![]()
|
Рис. 16.6. Полное р, нормальное σ и касательное τ напряжения в точке |
Рис. 16.7. Внутренние напряжения
|

В ряде случаев оказывается удобным разложить вектор р не на две, а на три составляющие, направленные параллельно координатным осям (рис. 16.7):
![]() .
.
Правило индексов: первый индекс указывает, какой оси параллельна нормаль к площадке действия рассматриваемого напряжения, второй индекс показывает, какой оси параллельно данное напряжение.
Установим связь между напряжениями и внутренними силовыми факторами в поперечном сечении бруса. Элементарные внутренние силы:
![]() ;
;
![]() ;
;
![]() .
.
Выражения составляющих главного вектора внутренних сил:
![]() ;
(16.1)
;
(16.1)
![]() ;
(16.2)
;
(16.2)
![]() .
(16.3)
.
(16.3)
Умножая каждую из элементарных сил на расстояние до соответствующей оси, получаем элементарные моменты внутренних сил:
![]() ;
;
![]() ;
;
![]() .
.
Суммируя элементарные моменты по всей площади сечения, получаем выражения для составляющих главного момента внутренних сил:
![]() ;
(16.4)
;
(16.4)
![]() ;
(16.5)
;
(16.5)
![]() .
(16.6)
.
(16.6)
Выражения (16.1)–(16.6) не служат для вычисления внутренних силовых факторов. Они выражают их физическую сущность.
Глава 17. Напряженно-деформированное
состояние элементарного объема материала
17.1. Напряженное состояние в точке.
Закон парности касательных напряжений.
Главные площадки и главные напряжения.
Классификация напряженных состояний
Напряженное состояние в данной точке тела характеризуется совокупностью нормальных и касательных напряжений, возникающих на бесчисленном множестве различно ориентированных в пространстве площадок, которые можно провести через эту точку.
Предположим, что в окрестности исследуемой точки выделен бесконечно малый элемент, имеющий форму прямоугольного параллелепипеда, и напряжения, возникающие на его гранях, известны.
Девять величин называют компонентами (рис. 17.1) напряженного состояния в данной точке.
Из условия равновесия выделенного элемента следует, что составляющие касательных напряжений, возникающих на любых двух взаимно перпендикулярных площадках, перпендикулярные общему ребру этих площадок, равны по абсолютному значению, т. е.
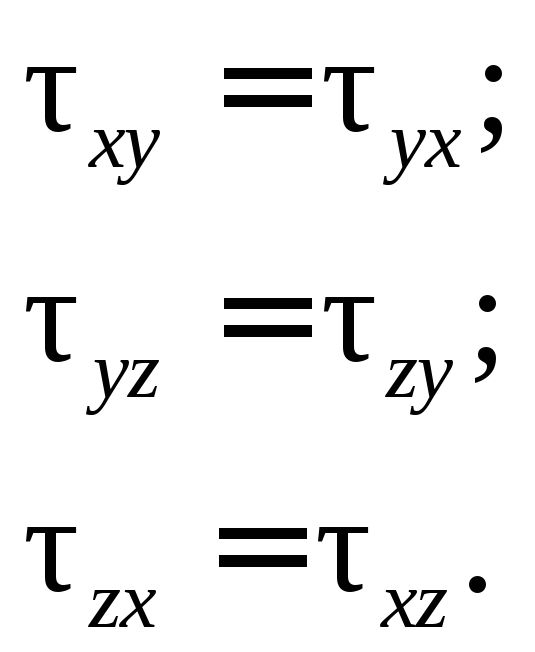
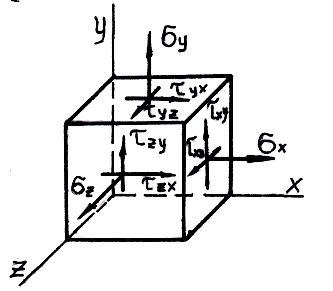
Рис. 17.1. Напряжения на гранях элементарного куба
Это положение называют законом парности касательных напряжений. Следовательно, из девяти компонентов напряженного состояния независимы лишь шесть.
Первое положение теории напряженного состояния может быть сформулировано следующим образом: напряженное состояние в точке тела задано, если известны напряжения на любых трех проходящих через нее взаимно перпендикулярных площадках.
Среди бесчисленного множества площадок, которые можно провести через исследуемую точку, имеются три взаимно перпендикулярные площадки, касательные напряжения на которых отсутствуют. Эти площадки и возникающие на них нормальные напряжения называют главными.
Классификацию видов напряженного состояния ведут по главным напряжениям. Если все три главных напряжения отличны от нуля, напряженное состояние называют объемным, пространственным или трехосным. В случае если одно из главных напряжений равно нулю, напряженное состояние называют плоским, или двухосным, наконец, если лишь одно из главных напряжений отлично от нуля, напряженное состояние линейное, или одноосное:
![]() – объемное
состояние;
– объемное
состояние;
![]() –плоское;
–плоское;
![]() –линейное.
–линейное.
Элементы, выделенные главными площадками, для различных частных случаев напряженного состояния показаны на рис. 17.2: а – трехосное растяжение; б – трехосное сжатие; в – трехосное смешанное напряженное состояние; г – двухосное растяжение; д – двухосное сжатие; е – частный случай двухосного смешанного напряженного состояния – чистый сдвиг; ж – одноосное растяжение; з – одноосное сжатие. Площадки, свободные от напряжений, так называемые нулевые главные площадки, покрыты точками.
а б в г д е ж з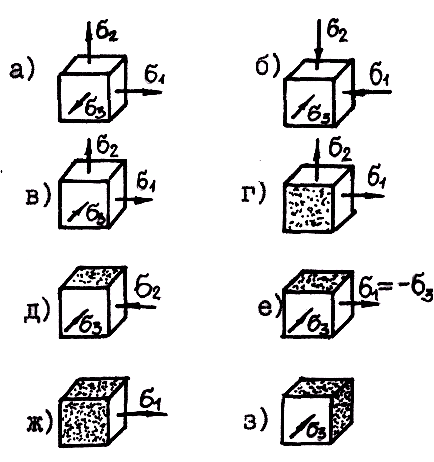
Рис. 17.2. Различные случаи напряженного состояния