

5.2. Момент силы относительно оси
Обозначив
моменты силы
![]() относительно осей
относительно осей
![]() ,
,
![]() и
и![]() ,
можем записать:
,
можем записать:
где
![]() ,
,
![]() и
и![]() –
модули проекций сил на плоскости,
перпендикулярные той оси, относительно
которой определяется момент;
–
модули проекций сил на плоскости,
перпендикулярные той оси, относительно
которой определяется момент;
l – плечи, равные длинам перпендикуляров от точки пересечения оси с плоскостью до проекции или ее продолжения.
Знак «плюс» или «минус» ставится в зависимости от того, в какую сторону поворачивается плечо l вектором проекции, если смотреть на плоскость проекции со стороны положительного направления оси; при стремлении вектора проекции повернуть плечо против хода часовой стрелки момент условимся считать положительным, и наоборот.
Следовательно, моментом силы относительно оси называется алгебраическая (скалярная) величина, равная моменту проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью (рис. 5.4).
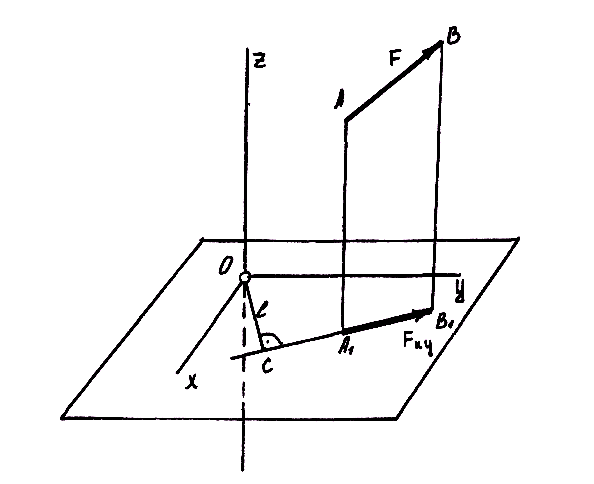
Рис. 5.4. Момент силы относительно оси
Рис.
5.4 иллюстрирует последовательность
определения момента силы
![]() относительно оси Z.
Если задана сила и выбрана (или задана)
ось:
относительно оси Z.
Если задана сила и выбрана (или задана)
ось:
а) то перпендикулярно оси выбирают плоскость (плоскость ХОY);
б) силу F проецируют на эту плоскость и определяют модуль Fxy этой проекции;
в) из точки O пересечения оси с плоскостью опускают перпендикуляр ОС к проекции Fxy и определяют плечо l = ОС;
г)
глядя на плоскость ХОY
со стороны положительного направления
оси Z
(т. е. в данном случае сверху), видим, что
ОС
поворачивается вектором
![]() против
хода стрелки часов, значит,
против
хода стрелки часов, значит,
![]()
Момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости:
а) сила
![]() пересекает ось (в этом случаеl
= 0) (рис. 5.5, а);
пересекает ось (в этом случаеl
= 0) (рис. 5.5, а);
б) сила
![]() параллельна оси (
параллельна оси (![]() ),
(рис. 5.5,б);
),
(рис. 5.5,б);
в) сила
![]() действует вдоль оси (l
=
0 и
действует вдоль оси (l
=
0 и
![]() ),
(рис. 5.5,в).
),
(рис. 5.5,в).
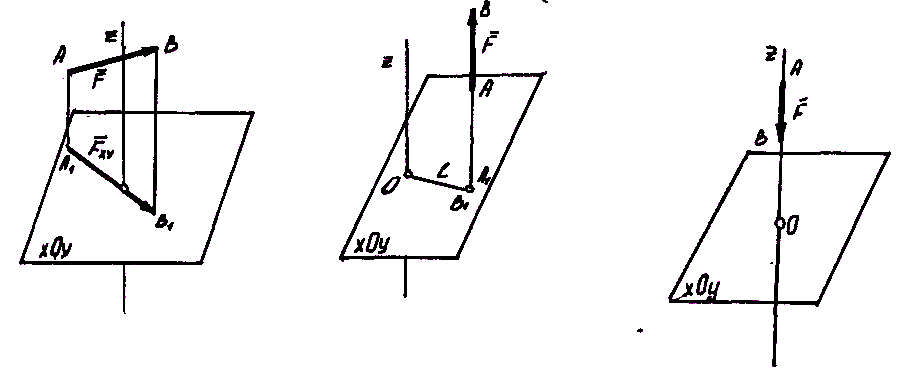
а б в
Рис. 5.5. Случаи равенства нулю момента силы
5.3. Пространственная система произвольно расположенных сил. Условие равновесия
Ранее подробно был изложен процесс приведения сил к точке и доказано, что любая плоская система сил приводится к силе – главному вектору – и паре, момент которой называется главным моментом, причем эквивалентные данной системе сил сила и пара действуют в той же плоскости, что и заданная система. Значит, если главный момент изобразить в виде вектора, то главный вектор и главный момент плоской системы сил всегда перпендикулярны друг другу.
Рассуждая аналогично, можно последовательно привести к точке силы пространственной системы. Но теперь главный вектор есть замыкающий вектор пространственного (а не плоского) силового многоугольника; главный момент уже нельзя получить алгебраическим сложением моментов данных сил относительно точки приведения. При приведении к точке пространственной системы сил присоединенные пары действуют в различных плоскостях и их моменты целесообразно представлять в виде векторов и складывать геометрически. Поэтому полученные в результате приведения пространственной системы сил главный вектор (геометрическая сумма сил системы) и главный момент (геометрическая сумма моментов сил относительно точки приведения), вообще говоря, не перпендикулярны друг другу.
Векторные
равенства
![]() и
и
![]() выражают необходимое и достаточное
условие равновесия пространственной
системы произвольно расположенных
сил.
выражают необходимое и достаточное
условие равновесия пространственной
системы произвольно расположенных
сил.
Если главный вектор равен нулю, то его проекции на три взаимно перпендикулярные оси также равны нулю. Если главный момент равен нулю, то равны нулю и три его составляющие на те же оси:
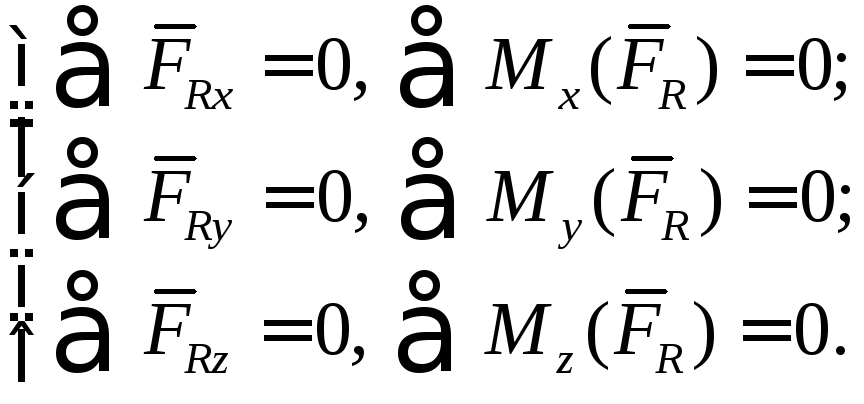
Значит, произвольная пространственная система сил статически определима лишь в том случае, когда число неизвестных не превышает шести.
Среди задач статики часто встречаются такие, в которых на тело действует пространственная система параллельных друг другу сил (рис. 5.6).
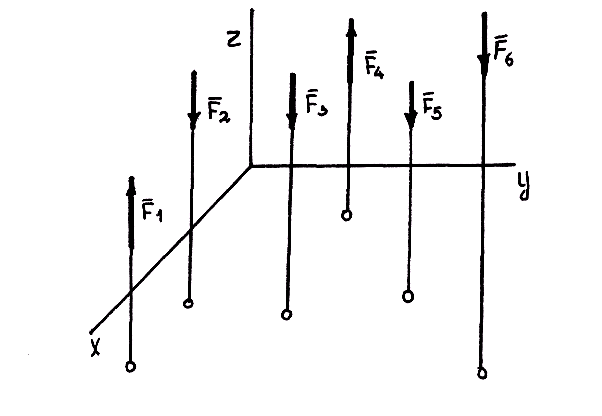
Рис. 5.6. Пространственная система параллельных сил
Уравнения равновесия для пространственной системы параллельных сил:
В пространственной системе параллельных сил неизвестных должно быть не больше трех, иначе задача становится статически неопределимой.