

Решение
1. Определение передаточного отношения механизма.
![]()
Выделим из механизма ступень с неподвижными осями, состоящую из колес z1, z2, z2´, z3 , z3´, z4, и планетарную ступень, состоящую из колес z4´, z5, z5´, z6 и водила Н (7);
а) для ступени с неподвижными осями
![]()
оси колес 1 и 4 непараллельные, поэтому знак передаточного отношения не определяем, а покажем направления вращения колес неподвижной ступени в соответствии с правилом стрелок:
![]()
б) чтобы определить передаточное отношение планетарной ступени, используем формулу Виллиса; остановим водило Н (7), используя зависимость (15.3), получим

колесо
6
неподвижно (![]() = 0), используя зависимость (15.4), получим
= 0), используя зависимость (15.4), получим
![]()
в) передаточное отношение всего механизма
![]()
Передаточное
отношение планетарной ступени
![]() .
Следовательно,
водило Н
(7)
вращается в ту же сторону, что и колесо
4.
.
Следовательно,
водило Н
(7)
вращается в ту же сторону, что и колесо
4.
Покажем
направление угловой скорости
![]() и
углового ускорения
и
углового ускорения
![]() на чертеже стрелками. Поскольку
на чертеже стрелками. Поскольку![]() ,
вращение ускоренное.
,
вращение ускоренное.
2. Угловая скорость и угловое ускорение ведомого звена 7 по модулю:
3.
Определить время, в течение которого
угловая скорость увеличивается вдвое:
![]()
Для
ускоренного вращения
![]()
Отсюда
![]()
4. Для
расчета момента инерции
![]() коническое ведущее колесо со средним
модулемmm
=
2 мм, z1
= 18 заменим цилиндром с диаметром, равным
среднему делительному диаметру:
коническое ведущее колесо со средним
модулемmm
=
2 мм, z1
= 18 заменим цилиндром с диаметром, равным
среднему делительному диаметру:
![]()
С учетом сказанного масса определяется по формуле
![]()
где ρ – плотность, ρ = 8000 кг/м3 (по условию).
![]()
Вес колеса
![]()
Смещение центра масс (точка А на рис. 15.11) l = 2 мм = 0,002 м.
Нормальная составляющая силы инерции
![]()
Нормальное ускорение точки A
![]()
![]()
Касательное ускорение точки A и касательная составляющая силы инерции:
Определим полное ускорение точки А, силу инерции и направление силы инерции:
В
практических расчетах составляющей
![]() ,
как малой величиной,
можно пренебречь и считать, что
,
как малой величиной,
можно пренебречь и считать, что
![]() Сравним силу тяжести и силу инерции:
Сравним силу тяжести и силу инерции:
![]()
Силой веса по сравнению с силой инерции при практических расчетах также можно пренебречь.
Момент сил инерции
![]()
Покажем направление всех векторных величин на чертеже.
5. Определение общего КПД механизма.
![]()
Здесь
![]() – КПД конической пары с учетом потерь
в подшипниках.
– КПД конической пары с учетом потерь
в подшипниках.
![]() –КПД цилиндрической
пары (две
пары по условию);
–КПД цилиндрической
пары (две
пары по условию);
![]() –КПД планетарной
передачи.
–КПД планетарной
передачи.
![]()
Раздел 3
ОСНОВЫ РАСЧЕТОВ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ
Глава 16. Напряженно-деформированное
СОСТОЯНИЕ детали
16.1. Метод сечений
Под внутренними силами будем подразумевать не их абсолютные значения, а только те приращения, которые вызваны действующими на тело нагрузками,
Для расчета на прочность необходимо иметь возможность определять внутренние силы по заданным внешним силам.
Основу для решения этой задачи дает метод сечений «Розу»:
Р – разрезаем тело плоскостью на две части;
О – отбрасываем одну часть;
З – заменяем действие отброшенной части внутренними силами;
У – уравновешиваем оставшуюся часть и из уравнения равновесия определяем внутренние силы.
Применяя метод сечений, силы, являющиеся внутренними для тела в целом, переводят во внешние для одной из его частей, полученной в результате мысленно проведенного сечения.
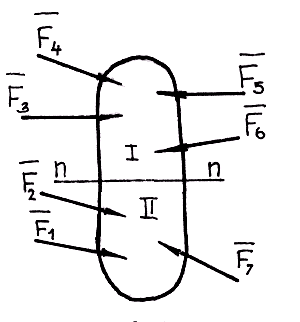
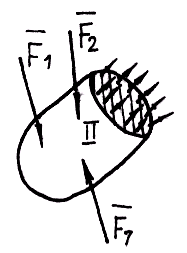
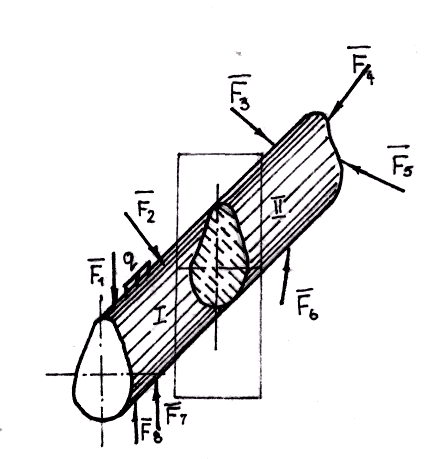
Рассмотрим брус, находящийся в равновесии под действием произвольной системы внешних (активных и реактивных) сил (рис. 16.1). Рассечем его на две части (I и II) некоторой произвольной плоскостью, перпендикулярной его продольной оси, и отбросим одну из частей (например I) (рис. 16.2). Из теоретической механики известно, что любая система сил может быть приведена к ее главному вектору и главному моменту, которые статически эквивалентны заданной системе сил. Главный вектор системы – три составляющие по осям выбранной системы координат. Главный момент – три момента, каждый из которых стремится повернуть тело вокруг одной из координатных осей.
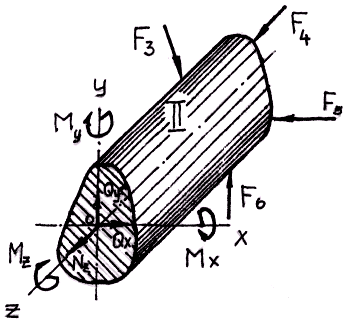
Составляющие главного вектора и главного момента внутренних сил, возникающих в поперечном сечении бруса (рис. 16.3), носят название внутренних силовых факторов (ВСФ) в этом сечении. Nz – продольная (или нормальная) сила; Qx, Qy – поперечные силы; Mz – крутящий момент; Qx, Qy – изгибающие моменты (рис. 16.4).
|
Рис. 16.1. Внешние силы
|
Рис. 16.2. Внутренние силы
|
|
Рис. 16.3. Метод сечений
|
Рис. 16.4. Внутренние силы в произвольном сечении бруса
|
Имеют место следующие виды деформаций:
если
![]() – растяжение,
– растяжение,![]() или
или
![]() –
срез;
–
срез;
если
![]() –
кручение,
–
кручение,
![]() или
или
![]() –
изгиб.
–
изгиб.
Д ля
определения каждого из внутренних
силовых факторов надо составить
соответствующее уравнение равновесия
для всех сил, действующих на оставленную
часть бруса (см. рис. 16.4).
ля
определения каждого из внутренних
силовых факторов надо составить
соответствующее уравнение равновесия
для всех сил, действующих на оставленную
часть бруса (см. рис. 16.4).
Продольная сила в произвольном поперечном сечении бруса численно равна алгебраической сумме проекций на продольную ось OZ бруса всех внешних сил, приложенных к его оставленной части.