

28 Билет
1. Метод уравнений Кирхгофа.
Для электрических цепей с большим число ветвей применение методов наложения и эквивалентных источников становится неэффективным. Универсальным методом анализа является использование законов Кирхгофа.
1-й закон Кирхгофа устанавливает взаимосвязь токов для любого узла. И поскольку в любой электрической цепи, состоящей из p-ветвей и q-узлов, число независимых узлов m=q-1, то число линейно независимых уравнений, составленных по 1-му закону Кирхгофа, также равно m.
2-ой закон Кирхгофа устанавливает взаимосвязь напряжений в любом контуре цепи. Число независимых контуров n=p–m будет определять число линейно независимых уравнений по второму закону Кирхгофа. Тогда общее число линейно независимых уравнений, составленных по двум законам Кирхгофа: p= m + n, то есть соответствует общему числу неизвестных токов во всех ветвях. При этом направления токов в ветвях и обхода контуров выбираются произвольно. Так, для мостовой схемы типа «конверт»: p = 6; q = 4; m = q – 1 = 3; n = p – m = 3; получим две системы уравнений:

П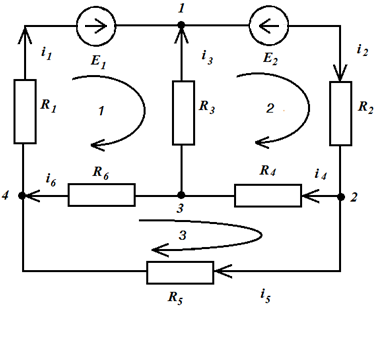 о
закону Ома для любой к-ветви:
о
закону Ома для любой к-ветви:
Uk = ikRk. Подставляя эти соотношения в получим 6 уравнений для токов, решив которые, можно определить токи и напряжения во всех ветвях. Так как решение системы из шести уравнений достаточно трудоемко, такие задачи удобнее выполнять на ЭВМ. Для этого полученное уравнение форматируют, то есть приводят к матричной форме.
Составим редуцированную матрицу соединений для узлов 1-3:
Тогда система уравнений (21) для токов в матричной форме примет вид:
 .
.
При этом наличие в активной линейной цепи источников тока учитывается как отдельные ветви в редуцированной матрице соединений и дополнительные строки в матрице-столбце токов.
Перепишем уравнения для напряжений в контурах из (21) в виде:
 .
.
Для этой системы, аналогично редуцированной матрице соединений, можно записать матрицу контуров N, состоящей из n-строк по числу независимых контуров и p- столбцов по количеству ветвей; при этом на пересечении i-ой строки и j-го столбца будут находиться:
+1, если направление тока в j-ой ветви i-го контура совпадает с направлением обхода;
-1, если направления противоположны;
0, если j-я ветвь в этот контур не входит.
Если в j-ой ветви имеется источник ЭДС, то напряжение этой ветви:
 ,
причем знак «-» ставится при совпадении
направлений ЭДС источника и падения
напряжения ветви, а знак «+» при
противоположных направлениях. Так, в
данной схеме: для 1-го контура
,
причем знак «-» ставится при совпадении
направлений ЭДС источника и падения
напряжения ветви, а знак «+» при
противоположных направлениях. Так, в
данной схеме: для 1-го контура
 ;
для 2-го контура
;
для 2-го контура
 .
Тогда редуцированная матрица контуров
и соответствующая система уравнений
будут иметь вид:
.
Тогда редуцированная матрица контуров
и соответствующая система уравнений
будут иметь вид:
 ;
;
 .
.
2. Линейные динамические системы. Частотный коэффициент передачи линейной динамической системы.
Линейными динамическими системами называются системы, обладающие следующим свойством: сигнал на их выходе определяется не только величиной входного сигнала в рассматриваемый момент времени, но и всей «предысторией» входного процесса. Иначе говоря, линейная динамическая система обладает некоторой памятью, от характера которой зависят все особенности преобразования входного сигнала.
Для этих систем связь между входными и выходными сигналами устанавливается с помощью дифференциального уравнения:

Именно такой оказывается динамическая связь между мгновенными значениями входного и выходного сигналов в электрической цепи с сосредоточенными параметрами. Если эта цепь линейна и стационарна, то все коэффициенты - постоянные вещественные числа.
Пусть
входной сигнал uвх(t)
задан. Тогда правая часть данного
уравнения, которую можно обозначить
f(t),
является известной функцией; и задача
анализа поведения системы сводится к
проблеме решения линейного дифференциального
уравнения n-го
порядка с постоянными коэффициентами
(более подробно об этом в классическом
методе анализа):
Порядок этого уравнения принято называть порядком динамической системы.
Частотный
коэффициент передачи линейной динамической
системы.
Если на вход линейной динамической
системы поступает экспоненциальный
сигнал вида uвх(t)
= exp(jwt),
то сигнал на выходе uвых(t)=K(jw)exp(jwt).
Подставляя эти выражения в исходное
дифференциальное уравнение (6.13), после
сокращения на общий экспоненциальный
множитель можно определить частотный
коэффициент передачи системы:
Итак, частотный коэффициент передачи любой динамической системы, описываемой обыкновенными дифференциальными уравнениями с постоянными коэффициентами, представляет собой дробно-рациональную функцию переменной jw; коэффициенты этой функции совпадают с коэффициентами дифференциального уравнения.