

8. Пневматические приводы технологического оборудования
Один из вариантов реализации сервисных функций (рис. 8.32) продемонстрируем на примере ранее рассмотренной пневматической САУ (см. рис. 8.28). С этой целью введем ряд дополнительных условий:
-
Рис. 8.32. Вариант реализации сервисных функций с помощью модуля управления
обеспечение возможности выбора режима единичного или непрерывного цикла; -
немедленный возврат штоков цилиндров А и D в исходную позицию при нажатии на кнопку «Аварийный останов»;
-
втягивание штока цилиндра В выполняется после втягивания штока цилиндра А;
-
втягивание штока цилиндра С выполняется после втягивания штока цилиндра D.

8. Пневматические приводы технологического оборудования
8.2. Пневмогидравлические приводы
Пневматические системы управления имеют очевидные достоинства: наличие централизованного источника сжатого воздуха; простота конструкций используемой элементной базы и, как следствие, ее относительно низкая стоимость; высокие скорости движения исполнительных механизмов и т. д. Однако применение пнев-могидравлических устройств и схемных решений позволяет придать комбинированным приводным системам ранее недоступные качества.
Так, при определенном сочетании конструктивных параметров пневмогидравлический цилиндр (рис. 8.33) может обеспечить более высокую, чем в гидравлическом приводе, стабильность рабочей скорости движения выходного звена.
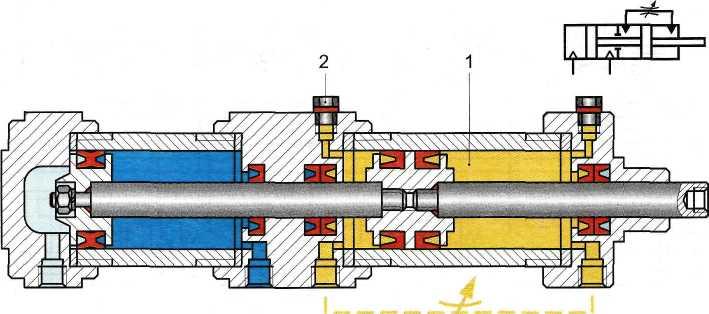

 Рис.
8.33. Пневмогидравлический цилиндр
Рис.
8.33. Пневмогидравлический цилиндр
По конструкции пневмогидравлический цилиндр аналогичен описанному ранее тандем-пневмоцилиндру, с той разницей что полости цилиндра с двусторонним штоком 1 заполнены гидравлическим маслом и соединены между собой через внешний регулируемый дроссель. Для удаления воздушных пробок из полостей гидроцилиндра в его крышках предусмотрены специальные заглушки 2.
Выполнение полезной работы и реверсирование направления движения выходного звена в пневмогидрав-лическом цилиндре осуществляется посредством подачи сжатого воздуха в полости пневмоцилиндра, а стабильное значение скорости перемещения поддерживается путем дросселирования практически несжимаемой жидкости — гидравлического масла, перетекающего из одной полости гидроцилиндра в другую (рис. 8.34, а).
Если необходимо уменьшить продольный габарит пневмогидравлического исполнительного механизма, используют конструкции, в которых пневмо- и гидроцилиндр расположены параллельно один другому (рис. 8.34, б).
Рис.
8.34. Примеры пневмогидравлических
приводов

8. Пневматические приводы технологического оборудования
Поскольку при движении выходного звена в гидроцилиндре с односторонним штоком объем масла, вытесняемого из одной полости, не равен объему, освобождаемому в другой, то в подобную конструкцию вводят компенсатор.
Гидравлические цилиндры применяют в системах с пневмоприводами не только для достижения высокой стабильности скорости перемещения выходного звена. Существуют также пневмогидравлические системы с гидравлическими исполнительными механизмами, одним из преимуществ которых является возможность работы под большим давлением, что обусловливает значительную выходную мощность. Получить рабочую жидкость под давлением без применения насосного агрегата можно с помощью пневмогидравлического мультипликатора (рис. 8.35).

В данной конструкции шток 1 пневмоцилиндра 2 одностороннего действия служит поршнем гидравлического цилиндра 3, масло из которого вытесняется в гидравлическую магистраль при подаче сжатого воздуха в поршневую полость 4 пневмоцилиндра. Давление гидравлической жидкости на выходе мультипликатора определяется отношением площадей поршня и штока пневмоцилиндра. В зависимости от типоразмера мультипликатора уровни давления сжатого воздуха на входе и масла на выходе могут соотноситься в пределах от 1:2 до 1:30. Таким образом, при давлении питания в пневмосети 0,6 МПа с помощью мультипликатора можно получить давление рабочей жидкости в гидравлической магистрали 18 МПа (рис. 8.36).

 Рис.
8.36. Пример пневмогидравлического
привода с использованием мультипликатора
Рис.
8.36. Пример пневмогидравлического
привода с использованием мультипликатора
Такие схемные решения используют, как правило, в различного рода зажимных устройствах, в которых требуется обеспечить значительные усилия и небольшие по величине рабочие ходы.
Пневмогидравлические приводы находят применение не только в рассмотренных ранее дискретных системах, но и в системах позиционирования, которые будут рассмотрены ниже.
![]()