

8. Пневматические приводы технологического оборудования
димо включать перед 1-ым шагом (А +) по сигналу от путевого выключателя а0, т. е. после выполнения 4-го шага А -), а выключать — по окончании 2-го шага (6 +) по сигналу от выключателя Ь1.
Упрощение системы уравнений, содержащей совпадающие шаги, следует проводить только после до--олнения правых частей соответствующих уравнений.
Рассмотренный способ хотя и решает поставленную задачу, но требует внимательности и владения навыками составления логических уравнений. Схемное же решение (рис. 8.15), к которому в итоге приходят путем применения данного способа, является, как правило, довольно громоздким. В особенности это относится к задачам с несколькими совпадающими шагами, решая которые, приходится вводить в схему уже не один, а несколько триггеров.

С оставление
и чтение схемы можно значительно
упростить путем использования шин при
ее изображении. Шинами
называют
горизонтальные линии, соединенные на
схеме с выходами определенных устройств.
В нашем случае каждый из четырех
путевых выключателей «питает» «свою»
шину, а логические взаимосвязи
реализуются
между сигналами в соответствующих
шинах.
оставление
и чтение схемы можно значительно
упростить путем использования шин при
ее изображении. Шинами
называют
горизонтальные линии, соединенные на
схеме с выходами определенных устройств.
В нашем случае каждый из четырех
путевых выключателей «питает» «свою»
шину, а логические взаимосвязи
реализуются
между сигналами в соответствующих
шинах.
Метод отключения сигнала
Этот метод, используемый при проектировании систем, содержащих совпадающие шаги, заключается в применении устройств, позволяющих формировать импульсный сигнал в момент достижения штоками пнев-моцилиндров конечных положений.
Вернемся к системе уравнений, описывающих работу сверлильного полуавтомата, и упростим ее путем исключения избыточных сигналов:
А + = Пуск ■ а0;

В полученной системе совпадающие уравнения отсутствуют. Однако следует обратить внимание на следующее: 2-ой шаг (В +) осуществляется по команде от путевого выключателя ая который остается активным и на очередном, 3-ем, шаге (В -), выполняемом по команде от путевого выключателя Ьу Это означает, что на распределитель, управляющий цилиндром В, одновременно будут поданы два противоположных сигнала управления — от путев ых выключателей а1 и Ьг В таком случае, как известно, пневмораспределитель остается в
8. Пневматические приводы технологического оборудования
позиции, определяемой первым из поступивших управляющих сигналов, следовательно, 3-й шаг (действие Б -) выполняться не будет.
Аналогичная ситуация имеет место и при выполнении 1-го шага: в исходном состоянии путевой выключатель Ьо активен и не позволяет выполнить действие А +.
Схема станет работоспособной, если «проблемные» путевые выключатели в момент включения будут формировать не постоянный сигнал, а импульсный. Существуют различные методы получения импульсного сигнала: путем использования пневмоклапанов выдержки времени (рис. 8.16), посредством путевых выключателей с «ломающимся» рычагом (рис. 8.17) и др.

Рис. 8.16. Принципиальная пневматическая схема сверлильного полуавтомата с применением пневмоклапанов выдержки времени (формирователей импульса)
В случае использования путевых выключателей
с «ломающимся» рычагом устанавливать
их нужно со смещением
в 2 — 4 мм от точки, соответствующей
конечному положению штока. Такая позиция
обусловливает формирование
путевым выключателем импульса при
подходе штока к конечному положению и
игнорирование прохождения
штока через выключатель при обратном
ходе.
случае использования путевых выключателей
с «ломающимся» рычагом устанавливать
их нужно со смещением
в 2 — 4 мм от точки, соответствующей
конечному положению штока. Такая позиция
обусловливает формирование
путевым выключателем импульса при
подходе штока к конечному положению и
игнорирование прохождения
штока через выключатель при обратном
ходе.

Рис. 8.17. Принципиальная пневматическая схема сверлильного полуавтомата с применением путевых выключателей с «ломающимся» рычагом
1 38
38
па пнеьматческих схемах MtJuia уыанивки nyietsbix выключи!слеш ^ «нимсиищимии» рычеиим вертикальным штрихом, перпендикулярно которому ставят стрелку, указывающую направление, в котором срабатывает выключатель при движении штока пневмоцилиндра.
Метод отключения сигнала формально сводится к следующей последовательности действий:
-
составляют систему логических уравнений, описывающих работу установки;
-
выделяют уравнения с совпадающими правыми частями;
-
упрощают систему логических уравнений путем сокращения избыточных сигналов;
• заменяют путевые выключатели, сигналы от которых входят в выделенные уравнения, на устройства, формирующие импульсный сигнал в момент своего срабатывания.
Метод разбиения на группы
Методы проектирования пневматических систем циклического действия, рассмотренные выше, требуют в -екоторой степени творческого подхода к решению поставленной задачи. В такой ситуации всегда существует зероятность совершения той или иной ошибки, свести к минимуму которую позволяют методы, характеризуемые значительной или полной формализацией процесса проектирования. К одним из них относится метод эазбиения на группы.
Под группой понимают некоторую часть единичного цикла работы системы, объединяющую максимальное ■(исло шагов, не содержащих противоположных действий одного и того же исполнительного механизма (выдви-чение штока — втягивание штока).
Чтобы разбить последовательность действий на группы, следует воспользоваться арифметической формой записи хода технологического процесса, например:
А+С+В-В+С+С-А-
c-. Группы будем в дальнейшем отделять друг от друга наклонной чертой (/).
1-ая группа 2-ая группа 3-я группа 4-ая группа А + С + В-/ В + 1 С + 1 С-А-1
C-
1-ая группа заканчивается шагом В-, поскольку на следующем шаге должно выполняться противоположное действие В +; во 2-ую группу входит только один шаг — одновременное выдвижение цилиндра В (В +) и втяги-зание цилиндра С (С-), т. к. последующий шаг С + — выдвижение цилиндра С; 3-я группа содержит шаг С +, тогда как в 4-ую входят шаги С - и А -.
Для иллюстрации метода разбиения на группы рассмотрим пневмопривод сверлильного полуавтомата (см. эис. 8.14). Последовательность шагов в этом случае разбивают на группы следующим образом:
А + В +/ В - А -.
Поскольку входящие в группу шаги не содержат противоположных действий по определению, они могут "оследовательно выполняться по сигналам от соответствующих путевых выключателей, без применения логических пневмоклапанов. 1-ый шаг (А +) выполняется по сигналу от пусковой кнопки, 2-ой (В +) — по сигналу от путевого выключателя а1 (окончание предыдущего шага), 3-ий шаг (В -, первый в следующей группе) — от выключателя Ьг а 4-ый (А -) — от Ьо.
Если каждую группу шагов выполнять по сигналам из отдельных шин (последовательно переключающихся), то первый шаг во 2-ой группе В - (3-ий в общей последовательности) не наложится на предшествующее ему действие В +, поскольку невозможно одновременное включение двух шин.
Очевидно, что питание на очередную шину должно подаваться по сигналу от путевого выключателя, фикси-эующего окончание последнего шага в предыдущей группе. В нашем примере шина 2, обеспечивающая выполнение шагов 2-ой группы, включается по сигналу от путевого выключателя bv а шина 1, обеспечивающая шаги '-ой группы, — от путевого выключателя а0:

далеки не виеща для включения ичереднии шины дишсиични лишь идниил i^ni нала ui ну icbuiu выклгича1е-
ля. Для примера рассмотрим следующую последовательность шагов некоторого технологического процесса:
А + В + С + /С-А-/С + /С-В-.
Шины 2-ой и 4-ой группы должны включаться по сигналу от путевого выключателя cv поскольку шаг С+ является последним в 1-ой и 3-ей группах.
Однако одновременная подача питания на две шины недопустима, т. к. это приводит к невыполнению заданной последовательности шагов. Следовательно, переключение на шину очередной группы должно осуществляться по логическому произведению двух сигналов (т. е. связанных логической функцией И): сигнала об окончании заключительного шага предшествующей группы и сигнала от активной шины, обеспечивающей выполнение шагов этой же группы. Очевидно, что при включении очередной шины предыдущая шина должна отключаться.
Описанная последовательность переключения шин реализуется на базе пневматических триггеров (биста-бильных пневмораспределителей) и не является предметом разработки для проектировщика системы управления в связи с наличием уже наработанных схемных решений.
Возможные схемы переключения шин представлены на рис. 8.18.


При поступлении сигнала © на пневмоклапан «И», подключенный к шине 2, триггер переключается. Акивной становится шина 1, шина 2 отключается.
При поступлении сигнала © на пневмоклапан «И», подключенный к шине 1, триггер переключается на шину 2. Шина 1 отключается.


При поступлении сигнала © на пневмоклапан «И», подключенный к шине 3, нижний триггер переключается и питание подается на шину 1 через верхний триггер. Шина 3 отключается.
При поступлении сигнала © на пневмоклапан «И», подключенный к шине 1, верхний триггер переключается на шину 2. Шина 1 отключается.
При поступлении сигнала ® на пневмоклапан «И», подключенный к шине 2, нижний триггер переключается на шину 3. Шина 2 отключается.

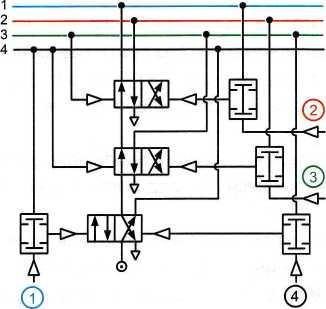
При поступлении сигнала © на пневмоклапан «И», подключенный к шине 4, нижний триггер переключается и питание подается на шину 1 через средний и верхний триггеры. Шина 4 отключается.
При поступлении сигнала ® на пневмоклапан «И», подключенный к шине 1, верхний триггер переключается на шину 2. Шина 1 отключается.
При поступлении сигнала ® на пневмоклапан «И», подключенный к шине 2, средний триггер переключается на шину 3. Шина 2 отключается.
При поступлении сигнала ® на пневмоклапан «И», подключенный к шине 3, нижний триггер переключается на шину 4. Шина 3 отключается.
Рис. 8.18. Схемы последовательного переключения шин
1 40
40