

8. Пневматические приводы технологического оборудования
С ледует
иметь в виду, что рассмотренный выше
способ упрощения системы логических
уравнений далеко не
всегда применим, поскольку некорректное
его использование приводит к неправильной
трактовке уравнений, особенно в
случае наличия так называемых совпадающих
шагов.
ледует
иметь в виду, что рассмотренный выше
способ упрощения системы логических
уравнений далеко не
всегда применим, поскольку некорректное
его использование приводит к неправильной
трактовке уравнений, особенно в
случае наличия так называемых совпадающих
шагов.
Под совпадающими шагами будем понимать такие шаги, уравнения для описания которых имеют одинаковые или эквивалентные правые части. Это означает, что отличающиеся друг от друга шаги (совпадающие) начинают выполняться при возникновении одной и той же комбинации сигналов от путевых выключателей.
Для иллюстрации проблемы совпадающих шагов рассмотрим пневмопривод сверлильного полуавтомата (рис. 8.14).
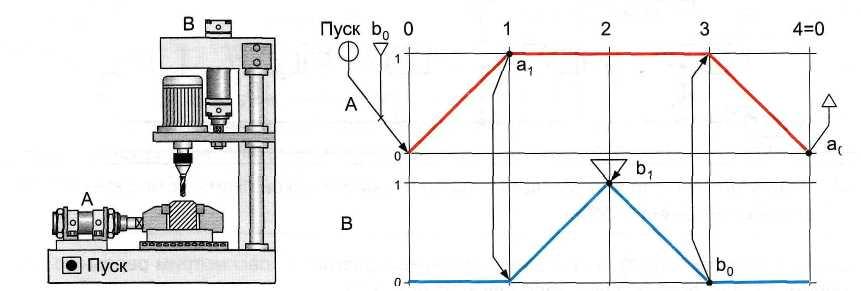
П ри
кратковременном нажатии на пусковую
кнопку первый цилиндр А фиксирует
заготовку в позиции для обработки
путем ее зажатия. Далее автоматически
начинает выдвигаться шток второго
цилиндра В, т. е. выполняется
рабочий ход инструмента. После достижения
крайнего положения шток цилиндра В
возвращается в исходную позицию, а
затем втягивается и шток цилиндра А.
ри
кратковременном нажатии на пусковую
кнопку первый цилиндр А фиксирует
заготовку в позиции для обработки
путем ее зажатия. Далее автоматически
начинает выдвигаться шток второго
цилиндра В, т. е. выполняется
рабочий ход инструмента. После достижения
крайнего положения шток цилиндра В
возвращается в исходную позицию, а
затем втягивается и шток цилиндра А.
Уравнения, описывающие работу станка-полуавтомата, будут иметь вид (без упрощения)
Д + = Пуск-ао-6о;

Заметим, что правые части 2-го и 4-го уравнений одинаковы, значит, при появлении комбинации сигналов а1 ■ Ьо выдвижение штока цилиндра В и втягивание штока цилиндра А будут происходить одновременно. Но функционирование системы подобным образом недопустимо, поскольку при этом не обеспечивается требуемый порядок выполнения рабочих операций.
Избежать одновременного выполнения 2-го и 4-го шагов можно путем формального изменения совпадающих правых частей соответствующих уравнений. С этой целью в них вводят дополнительные сигналы Х1 и Хг, в результате чего эти уравнения запишутся следующим образом:
е + = аг-Ь0-Х,; А- = а1Ь0-Х2.
Два дополнительных сигнала Х1 и Х2 можно реализовать путем применения пневматического триггера, выполнение функций которого обеспечивается, к примеру, бистабильным 4/2-распределителем с пневматическим управлением. Если триггер включен, то на его выход подается сигнал Xv если выключен — сигнал Х2.
Таким образом, для решения проблемы совпадающих шагов полученную систему логических уравнений необходимо дополнить уравнениями, описывающими функционирование триггера, а именно: чтобы сигнал Х1 появился перед началом 2-го шага, необходимо включать триггер (7+) перед выполнением как минимум предыдущего шага; отключать же его (7-) следует после выполнения 2-го шага. Другими словами, триггер необхо-
Полуавтомат — машина (или агрегат), самостоятельно выполняющая полный рабочий цикл и требующая вмешательства извне лишь для повторения цикла. Станок-полуавтомат отрабатывает весь цикл обработки заготовки и возвращает механизмы станка в исходное положение самостоятельно, тогда как установку заготовки и снятие обработанной детали производит оператор.
1 36
36