

1.4. Структурный синтез механизмов с помощью групп Ассура
Структурный синтез механизмов с помощью структурных групп сводится к тому, что к входному механизму или к нескольким входным механизмам присоединяются структурные группы. При этом, поскольку число степеней свободы группы Ассура W= 0, то её присоединение к механизму не меняет числа степеней свободы. На рис. 1.7 приведены примеры такого синтеза. На рис. 1.7а сформирован шестизвенный механизм 2-го класса 2-го порядка, структурно состоящий из входного кривошипа 1 и двух структурных групп:ABCиDE. Поскольку у входного механизма число степеней свободыW= 1, то и у всего механизма – тоже. На рис. 1.7бсинтезирован пятизвенный механизм с числом степеней свободы W = 2. Здесь входные звенья – 1-е и 2-е, а ABC – структурная группа.
При таком
синтезе созданный мехзанизм не будет
иметь пассивных связей. Если при
дальнейшей проработке они потребуются
по соображениям прочности или жесткости,
то они могут быть введены конструктивно.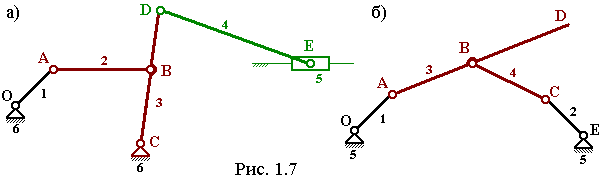
1.5. Диагностика наличия пассивных связей
При формировании механизма из структурных групп вопрос о наличии пассивных связей в механизме не возникает. Но он может возникнуть при анализе уже существующих механизмов или нарисованных “от руки”, например, заказчиком.
Алгоритм диагностики пассивных связей основан на анализе матрицы смежности механизма, которая представляет собой квадратную таблицу с количеством строк и столбцов, равным числу звеньев, включая стойки.
Матрица смежности формируется следующим образом. В каждой её ячейке с индексами “i”, “j”, где i – номер строки, j – номер столбца, ставится “0”, если i-е и j-е звенья не образуют кинематической пары. Если же они образуют кинематическую пару, то ставится цифра, равная числу степеней свободы этой кинематической пары.
Рассмотрим “классический” пример механизма с пассивной связью (см. рис. 1.3). Составим для него матрицу смежности (табл. 1.1, нули опущены).
Таблица 1.1
|
N |
1 |
2 |
3 |
4 |
5 |
|
1 |
- |
1 |
|
1 |
1 |
|
2 |
1 |
- |
1 |
|
|
|
3 |
|
1 |
- |
1 |
1 |
|
4 |
1 |
|
1 |
- |
|
|
5 |
1 |
|
1 |
|
- |
При её анализе примем во внимание, что матрица симметрична, и анализировать достаточно или строки или столбцы, будем анализировать строки.
Определим для матрицы смежности понятие “прямоугольник на матрице смежности” (в таблице 1.1 он выделен фоном). Это ситуация, когда в n строках на одних и тех же местах стоит более, чем n единиц. Длинами сторон прямоугольника считается количество единиц по его горизонтали и вертикали.
Наличие в матрице смежности “прямоугольников” и указывает на пассивные связи. При этом их количество, на которое указывает один “прямоугольник” равно разности длин его сторон. Номера столбцов указывают на те звенья, из которых надо выбрать пассивные.
Естественно,
что выбор того, какое (или какие) из
звеньев является пассивным остается
за конструктором. В рассматриваемом
примере 1-я и 3-я строки образуют
“прямоугольник” с разностью длин
сторон: 3–2=1, следовательно, одно из
звеньев 2, 4 или 5 является пассивным.
Звено 5 (стойку) можно исключить из
рассмотрения, а звенья 2 и 4 с точки зрения
пассивности действительно равнозначны,
любое одно из них может быть удалено из
механизма.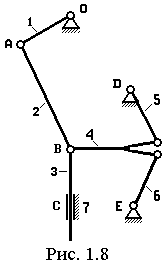
Рассмотрим более сложный пример (рис. 1.8). Для этого механизма матрицу смежности можно составить двояко. В узле “B” сходится три звена, следовательно, этом узле две кинематические пары.
Вариант 1. Полагаем, что в узле “B” шарниры имеют место между звеньями 2-4 и 3-4. Матрица смежности для этого случая представлена в табл. 1.2.
Таблица 1.2
|
N |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
- |
1 |
|
|
|
|
1 |
|
2 |
1 |
- |
|
1 |
|
|
|
|
3 |
|
|
- |
1 |
|
|
1 |
|
4 |
|
1 |
1 |
- |
1 |
1 |
|
|
5 |
|
|
|
1 |
- |
|
1 |
|
6 |
|
|
|
1 |
|
- |
1 |
|
7 |
1 |
|
1 |
|
1 |
1 |
- |
Вариант 2. Полагаем, что в узле “B” шарниры имеют место между звеньями 2-3 и 3-4. Матрица смежности для этого случая представлена в табл. 1.3.
Таблица 1.3
|
N |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
- |
1 |
|
|
|
|
1 |
|
2 |
1 |
- |
1 |
|
|
|
|
|
3 |
|
1 |
- |
1 |
|
|
1 |
|
4 |
|
|
1 |
- |
1 |
1 |
|
|
5 |
|
|
|
1 |
- |
|
1 |
|
6 |
|
|
|
1 |
|
- |
1 |
|
7 |
1 |
|
1 |
|
1 |
1 |
- |
Несмотря на то, что матрицы составлены по-разному – они дают один и тот же результат. Строка 4 и часть строки 7 образуют “прямоугольник” с разностью длин сторон: 3–2=1 (в таблицах выделены фоном) и указывают они на одни и те же звенья: 3, 5, 6, одно из которых является пассивным. В этом механизме пассивным наверно является 5-е или 6-е.