

4.3. Основные параметры эвольвентного зацепления
Одна из характерных окружностей зубчатого колеса фактически уже была определена – это основная окружность, диаметр которой обозначается db (см. рис. 4.2в) – это окружность, разверткой которой и образуется эвольвента.
На рис. 4.3а представлена схема зацепления двух колес. Окружности, проведенные из центров вращения колес через полюс зацепления, называются начальными и обозначаются dW (все обозначения параметров стандартизованы).
При эвольвентном зацеплении требование теоремы Виллиса выполняется “с избытком”. В данном случае не только полюс зацепления неподвижен, но в процессе всего зацепления неподвижна вся общая нормаль к контактирующим поверхностям n-n. По способу образования эвольвенты очевидно, что общая нормаль является касательной к основным окружностям обоих колес и радиусы этих окружностей определяются перпендикулярами O1b1, O2b2.
Угол между касательной к начальным окружностям колес и нормалью к контактирующим поверхностям n-n называется углом зацепления W.
Соотношение между диаметром начальной и основной окружности:
db = dW cos W ( 4.2 )
Шагом
зацепления
называется расстояние между одноименными
точками профилей двух соседних зубьев
(см. рис. 4.3б).
Шаг измеряют по дуге начальной или
основной окружности. В первом случае
его обозначают pW,
а во втором – pb.
Для косозубых и винтовых колес шаг можно
измерять по торцу зуба (см. рис. 4.3в),
тогда шаг называют торцевым и в индексе
ставят значок “t”
или по нормали к оси зуба, в этом случае
его называют нормальным и в индексе
ставят значок “n”.
В соответствии с выражением (4.2):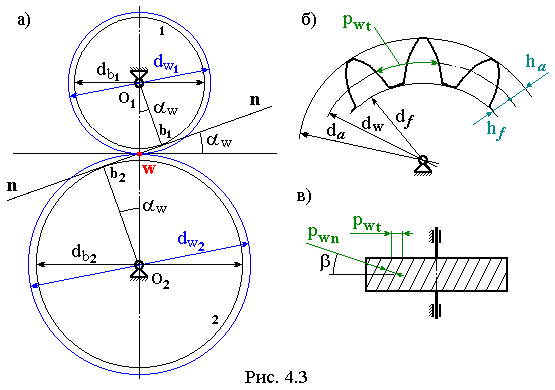
pb = pW cos W ( 4.3 )
Нормальный шаг:
pn = pt cos ( 4.4 )
где – угол наклона зубьев косозубого колеса (см. рис. 4.3в).
Важнейшим параметром любого зубчатого колеса является его модуль. По определению модуль зубчатого колеса это:
m = pWt / ; ( 4.5 )
Подчеркнем, что выражение (4.5) – это определение понятия “модуль зубчатого колеса”, а не формула для его вычисления. В дальнейшем мы узнаем, что “m” определяется по условиям прочности или точности.
Понятие модуля колеса важно в первую очередь тем, что любой размер зубчатого колеса выражают в виде некоторого безразмерного коэффициента умноженного на “m”, или комбинации коэффициентов, умноженной на “m”. Это позволяет унифицировать проектные расчеты.
Величины модулей зубчатых колес стандартизованы, т.е. в ГОСТах перечислены те значения “m”, которые допускается применять при проектировании.
Теперь введем еще одну характерную окружность: так называемую делительную, её диаметр:
d = m Z; ( 4.6 )
где Z – количество зубьев на колесе.
В дальнейшем, когда мы будем изучать изготовление зубчатых колес методом обкатки, будет введено понятие смещения инструмента. Сейчас предварительно отметим, что при отсутствии смещения инструмента делительная и начальная окружности совпадают.
Начальная окружность делит зуб на головку и ножку. На рис. 4.3б обозначены: ha – высота головки зуба, hf – высота ножки зуба.
ha = ha* m, hf = ( ha* + C*) m ( 4.7 )
где ha* – коэффициент высоты головки зуба, его значение:
ha* = 1 – для нормального зуба, ha* = 0,8 – для укороченного,
C* – коэффициент радиального зазора, при изготовлении колеса без смещения инструмента его значение обычно принимают C* = 0,25.
Следующие две характерные окружности зубчатого колеса: окружность выступов – её диаметр обозначается da и окружность впадин зубьев – df (см. рис. 4.3б):
da = dW + 2ha; df = dW – 2hf; ( 4.8 )
Таким образом, ножка зуба больше его головки на величину радиального зазора между окружностью выступов одного колеса и окружностью впадин – другого.