

5.4.1.3. Кулисные структурные группы
Расчетная
схема кулисной
структурной группы первого вида
представлена на рис. 5.6.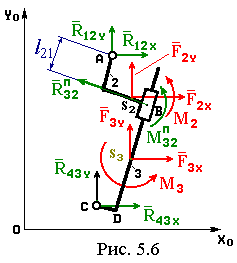
Для определения реакций применим следующий прием. Сначала для ползуна “B” найдем не реальные реакции R23(1), R23(2) (см. рис. 5.7) а условные, приведенные к центру ползуна: реакцию R23п и соответствующий реактивный момент M23п.
Запишем условия равновесия звена 2 в виде равенства нулю суммы моментов относительно точки “А” всех сил, на него действующих и равновесия кулисы 3 в виде равенства нулю суммы моментов всех сил относительно точки “С” и учитывая, что R23п = – R32п, M23п = – M32п
–F2x (yS2 – yA) + F2y (xS2 – xA) + M2 – M23п R23п l21 = 0;
( 5.12 )
–F3x (yS3 – yС) + F3y (xS3 – xС) + M3 + M23п R23п lBD = 0,
где: l21 – смещение шарнира “А” вдоль оси кулисы,
lBD – длина вектора, определяющего положение ползуна на кулисе.
Из системы (5.12) определяем R23п, M23 п.
Равновесие звена 2 в виде равенства нулю суммы всех сил, на него действующих:
R12x + F2x + F3x – R23п sin 3 = 0,
( 5.13 )
R12y + F2y + F3y + R23п cos 3 = 0,
где: 3 – угол, определяющий положение оси кулисы (см. рис. 2.11).
Из системы (5.13) находим R12x , R12y.
Равновесие структурной группы в целом в виде равенства нулю суммы всех сил, на нее действующих:
или
в проекциях на оси системы OX0Y0:
R12x + F2x + F3x + R43x = 0 ;
( 5.14 )
R12y + F2y + F3y + R43y = 0.
Отсюда
находим R43x,
R43y.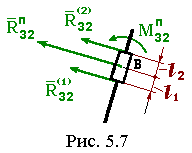
Теперь по значениям R32п, M32п при известных размерах ползуна l1, l2 (рис. 5.7) не сложно найти величины реальных реакций в ползуне “В” R32(1) , R32(2) из следующей системы уравнений:
R32(1) + R32(2) = R32п,
( 5.15 )
–R32(1) l1 + R32(2) l2 = M32п.
Реакции в кинематических парах кулисной
структурной группы второго вида(рис. 5.8) рассчитываются полностью
аналогично предыдущему, отличается
только индексация звеньев и некоторые
знаки.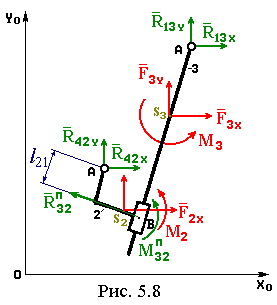
Условия равновесия звена 2 в виде равенства нулю суммы моментов относительно точки “А” и равновесия звена 3 в виде равенства нулю суммы моментов всех сил относительно точки “С”:
–F2x (yS2 – yA) + F2y (xS2 – xA) + M2 – M23п R23п l21 = 0,
( 5.16 )
–F3x (yS3 – yС) + F3y (xS3 – xС) + M3 + M23п R23п lAB = 0.
где: l21 – смещение шарнира “А” вдоль оси звена 3,
lAB – длина вектора, определяющего положение ползуна.
Из системы (5.16) определяем R23п, M23 п.
Равновесие звена 2 в виде равенства нулю суммы сил, на него действующих:
R42x + F2x + F3x – R23п sin 3 = 0,
( 5.17 )
R42y + F2y + F3y + R23п cos 3 = 0.
где: 3 – угол, определяющий положение оси звена 3 (см. рис. 2.12).
Из системы (5.17) находим R42x, R42y.
Равновесие структурной группы в целом в виде равенства нулю суммы всех сил, на нее действующих в проекциях на оси НСК OX0Y0:
R42x + F2x + F3x + R13x = 0;
( 5.18 )
R42y + F2y + F3y + R13y = 0.
Отсюда находим R13x, R13y. После чего из уравнений вида (5.15) получаем реальные реакции в ползуне “В” R32(1), R32(2).